 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Energy-Harvesting Hybrid VLC/RF Networks with Random Receiver Orientation
Feb 06, 2023In this paper, we consider an indoor hybrid visible light communication (VLC) and radio frequency (RF) communication scenario with two-hop downlink transmission. The LED carries both data and energy in the first phase, VLC, to an energy harvester relay node, which then uses the harvested energy to re-transmit the decoded information to the RF user in the second phase, RF communication. The direct current (DC) bias and the assigned time duration for VLC transmission are taken into account as design parameters. The optimization problem is formulated to maximize the data rate with the assumption of decode-and-forward relaying for fixed receiver orientation. The non-convex optimization is split into two sub-problems and solved cyclically. It optimizes the data rate by solving two sub-problems: fixing time duration for VLC link to solve DC bias and fixing DC bias to solve time duration. The effect of random receiver orientation on the data rate is also studied, and closed-form expressions for both VLC and RF data rates are derived. The optimization is solved through an exhaustive search, and the results show that a higher data rate can be achieved by solving the joint problem of DC bias and time duration compared to solely optimizing the DC bias.
Optimal Design of Energy-Harvesting Hybrid VLC-RF Networks
Jun 09, 2022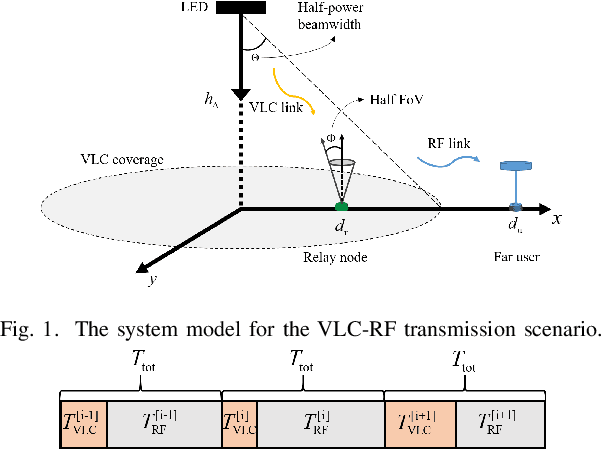
In this extended abstract, we consider a dual-hop hybrid visible light communication (VLC)/radio frequency (RF) scenario where energy is harvested during the VLC transmission and used to power the relay. We formulate the optimization problem in the sense of maximizing the data rate under the assumption of decode-and-forward (DF) relaying. As the design parameters, the direct current (DC) bias and the assigned time duration for energy harvesting are taken into account. In particular, the joint optimization is split into two subproblems, which are then cyclically solved. Additional details and numerical results are left to be presented in the full paper.
Comparative Analysis of Radar Cross Section Based UAV Classification Techniques
Dec 17, 2021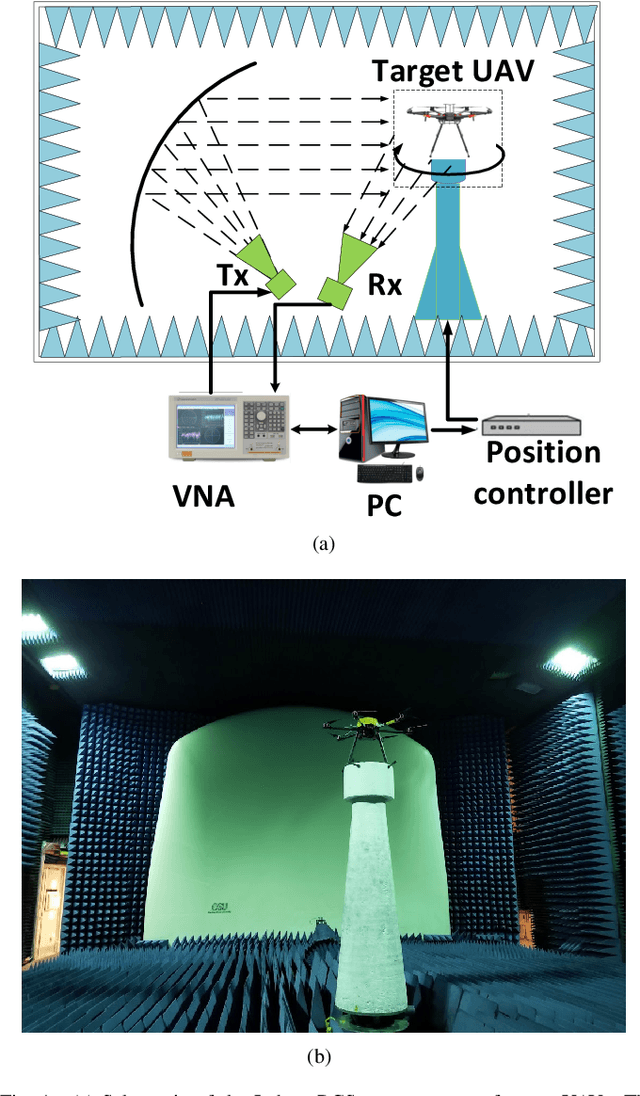
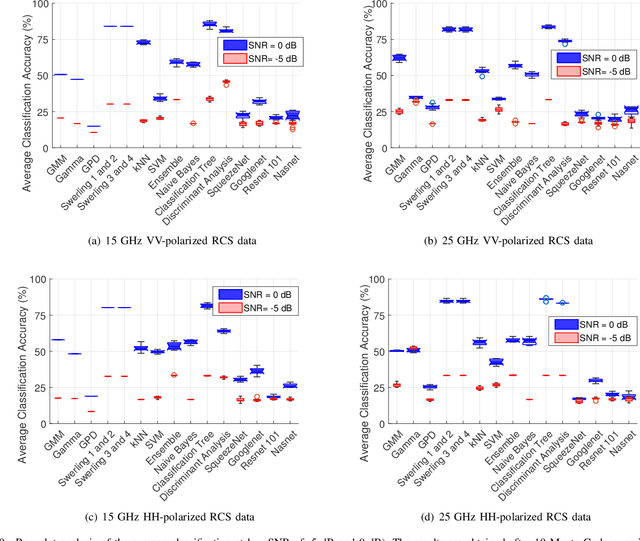
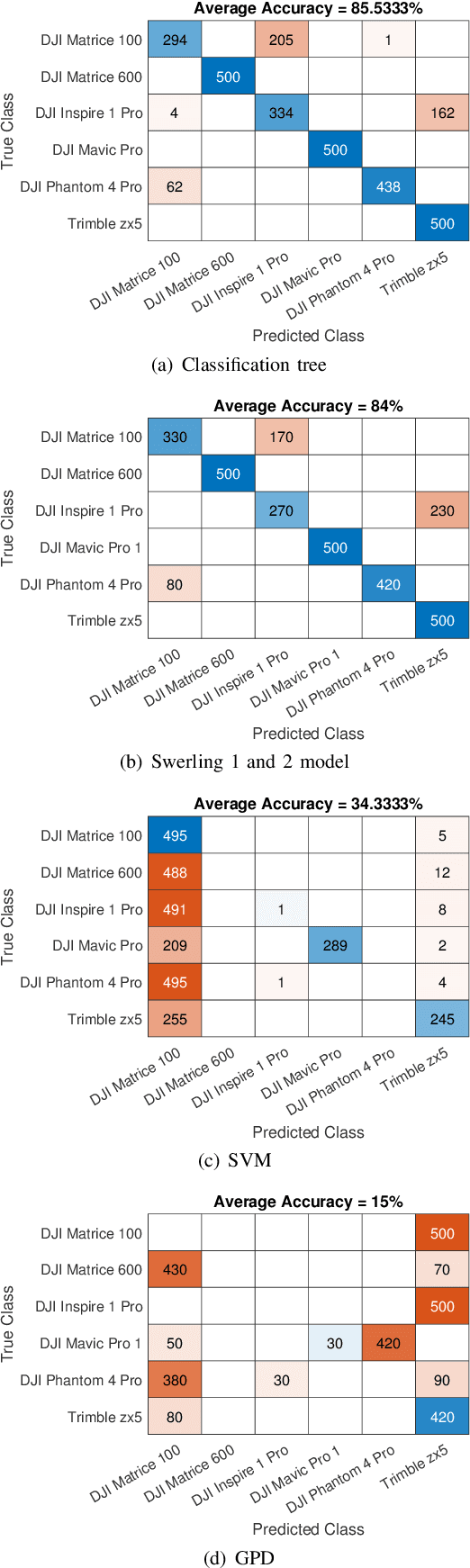
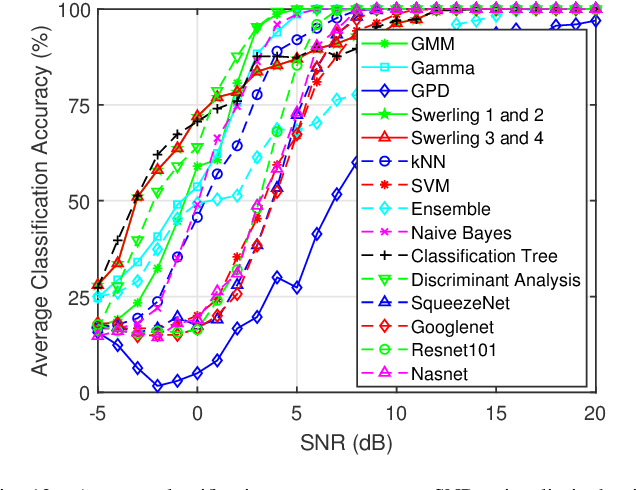
This work investigates the problem of unmanned aerial vehicles (UAVs) identification using their radar crosssection (RCS) signature. The RCS of six commercial UAVs are measured at 15 GHz and 25 GHz in an anechoic chamber, for both vertical-vertical and horizontal-horizontal polarization. The RCS signatures are used to train 15 different classification algorithms, each belonging to one of three different categories: statistical learning (SL), machine learning (ML), and deep learning (DL). The study shows that while the classification accuracy of all the algorithms increases with the signal-to-noise ratio (SNR), the ML algorithm achieved better accuracy than the SL and DL algorithms. For example, the classification tree ML achieves an accuracy of 98.66% at 3 dB SNR using the 15 GHz VV-polarized RCS test data from the UAVs. We investigate the classification accuracy using Monte Carlo analysis with the aid of boxplots, confusion matrices, and classification plots. On average, the accuracy of the classification tree ML model performed better than the other algorithms, followed by the Peter Swerling statistical models and the discriminant analysis ML model. In general, the classification accuracy of the ML and SL algorithms outperformed the DL algorithms (Squeezenet, Googlenet, Nasnet, and Resnet 101) considered in the study. Furthermore, the computational time of each algorithm is analyzed. The study concludes that while the SL algorithms achieved good classification accuracy, the computational time was relatively long when compared to the ML and DL algorithms. Also, the study shows that the classification tree achieved the fastest average classification time of about 0.46 ms.
Channel Rank Improvement in Urban Drone Corridors Using Passive Intelligent Reflectors
Aug 04, 2021



Multiple-input multiple-output (MIMO) techniques can help in scaling the achievable air-to-ground (A2G) channel capacity while communicating with drones. However, spatial multiplexing with drones suffers from rank deficient channels due to the unobstructed line-of-sight (LoS), especially in millimeter-wave (mmWave) frequencies that use narrow beams. One possible solution is utilizing low-cost and low-complexity metamaterial-based intelligent reflecting surfaces (IRS) to enrich the multipath environment, taking into account that the drones are restricted to fly only within well-defined drone corridors. A hurdle with this solution is placing the IRSs optimally. In this study, we propose an approach for IRS placement with a goal to improve the spatial multiplexing gains, and hence to maximize the average channel capacity in a predefined drone corridor. Our results at 6 GHz, 28 GHz and 60 GHz show that the proposed approach increases the average rates for all frequency bands for a given drone corridor, when compared with the environment where there are no IRSs present, and IRS-aided channels perform close to each other at sub-6 and mmWave bands.
Radar Cross Section Based Statistical Recognition of UAVs at Microwave Frequencies
Feb 23, 2021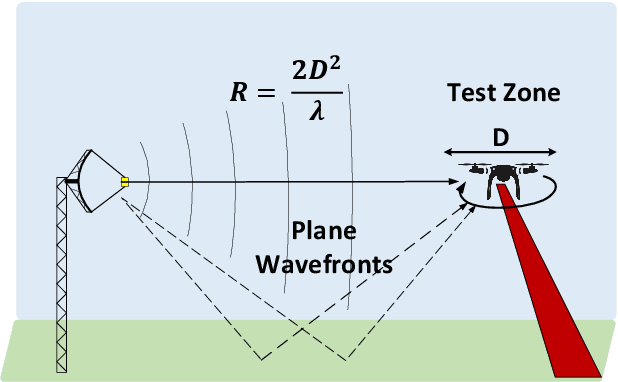
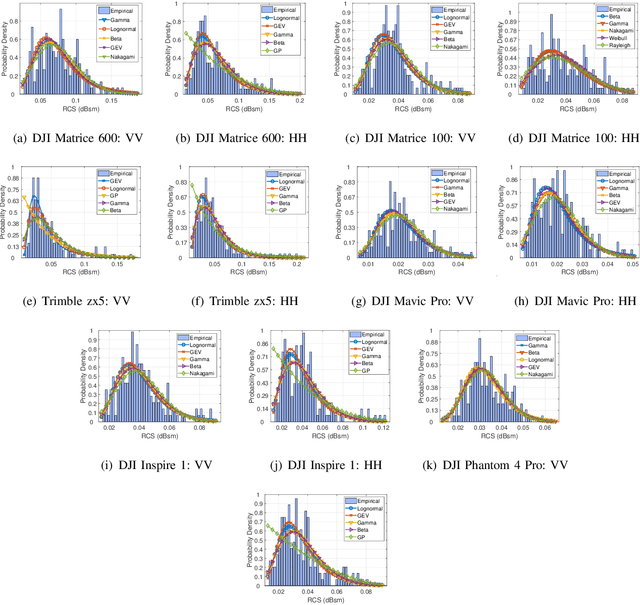
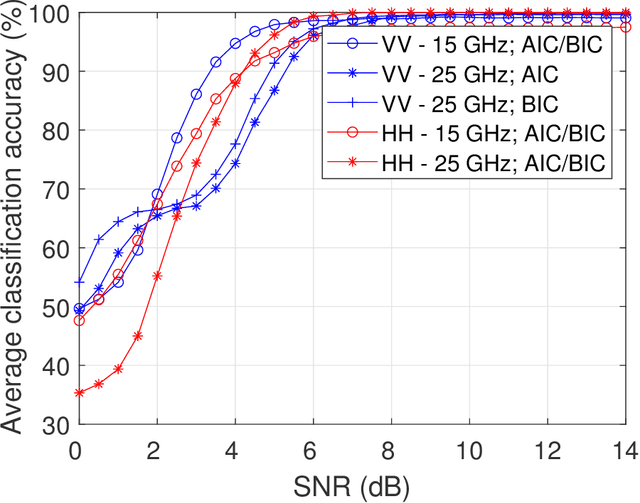
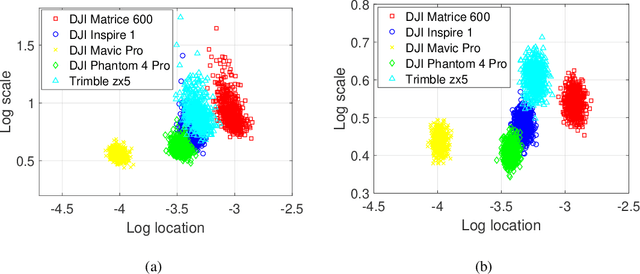
This paper presents a radar cross-section (RCS)-based statistical recognition system for identifying/ classifying unmanned aerial vehicles (UAVs) at microwave frequencies. First, the paper presents the results of the vertical (VV) and horizontal (HH) polarization RCS measurement of six commercial UAVs at 15 GHz and 25 GHz in a compact range anechoic chamber. The measurement results show that the average RCS of the UAVs depends on shape, size, material composition of the target UAV as well as the azimuth angle, frequency, and polarization of the illuminating radar. Afterward, radar characterization of the target UAVs is achieved by fitting the RCS measurement data to 11 different statistical models. From the model selection analysis, we observe that the lognormal, generalized extreme value, and gamma distributions are most suitable for modeling the RCS of the commercial UAVs while the Gaussian distribution performed relatively poorly. The best UAV radar statistics forms the class conditional probability densities for the proposed UAV statistical recognition system. The performance of the UAV statistical recognition system is evaluated at different signal noise ratio (SNR) with the aid of Monte Carlo analysis. At an SNR of 10 dB, the average classification accuracy of 97.43% or better is achievable.