 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey on Detection, Classification, and Tracking of Aerial Threats using Radar and Communications Systems
Feb 08, 2024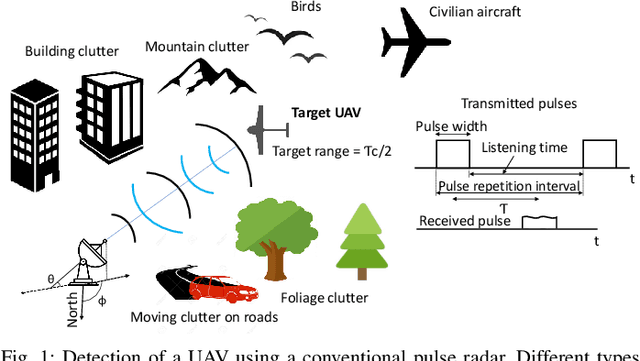
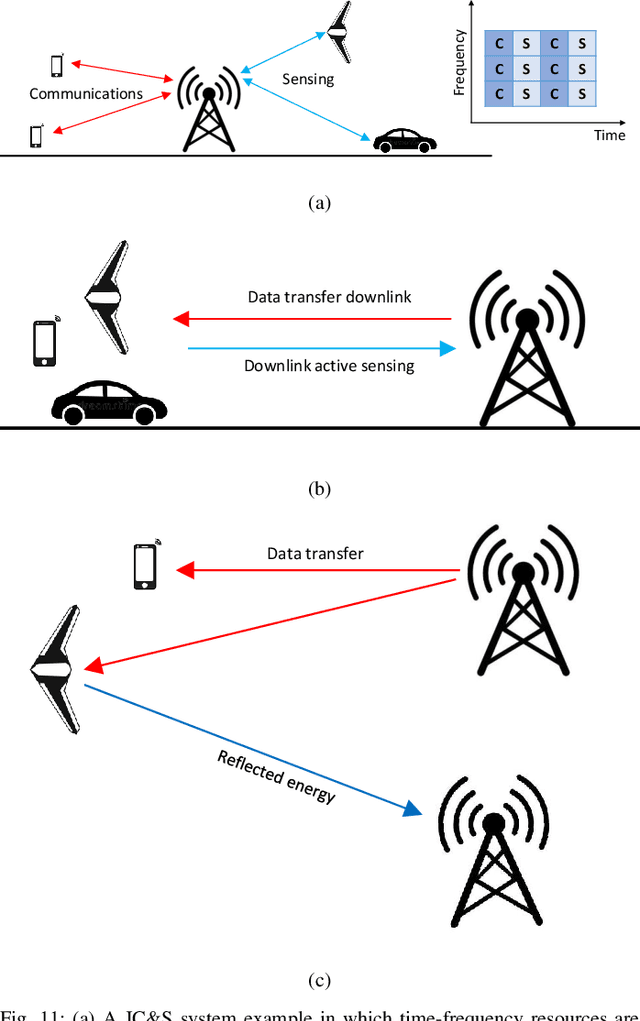
The use of unmanned aerial vehicles (UAVs) for a variety of commercial, civilian, and defense applications has increased many folds in recent years. While UAVs are expected to transform future air operations, there are instances where they can be used for malicious purposes. In this context, the detection, classification, and tracking (DCT) of UAVs (DCT-U) for safety and surveillance of national air space is a challenging task when compared to DCT of manned aerial vehicles. In this survey, we discuss the threats and challenges from malicious UAVs and we subsequently study three radio frequency (RF)-based systems for DCT-U. These RF-based systems include radars, communication systems, and RF analyzers. Radar systems are further divided into conventional and modern radar systems, while communication systems can be used for joint communications and sensing (JC&S) in active mode and act as a source of illumination to passive radars for DCT-U. The limitations of the three RF-based systems are also provided. The survey briefly discusses non-RF systems for DCT-U and their limitations. Future directions based on the lessons learned are provided at the end of the survey.
A Survey on Detection, Tracking, and Classification of Aerial Threats using Radars and Communications Systems
Nov 18, 2022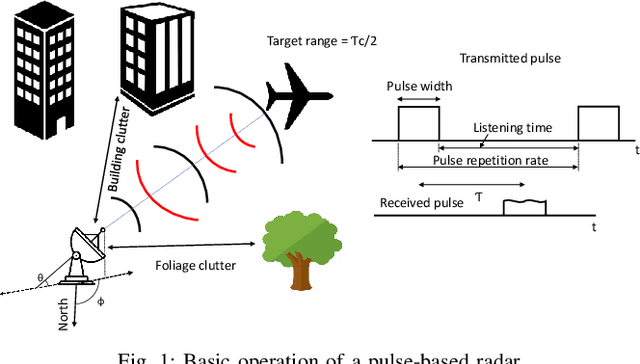



The use of unmanned aerial vehicles (UAVs) for different applications has increased many folds in recent years. The UAVs are expected to change the future air operations. However, there are instances where the UAVs can be used for malicious purposes. The detection, tracking, and classification of UAVs is challenging compared to manned aerial vehicles (MAVs) mainly due to small size, complex shapes, and ability to fly close to the terrain and in autonomous flight patterns in swarms. In this survey, we will discuss current and future aerial threats, and provide an overview of radar systems to counter such threats. We also study the performance parameters of radar systems for the detection, tracking, and classification of UAVs compared to MAVs. In addition to dedicated radar systems, we review the use of joint communication-radar (JCR) systems, as well as passive monitoring of changes in the common communication signals, e.g., FM, LTE, and any transmissions that may radiate from a UAV, for the detection, tracking, and classification of UAVs are provided. Finally, limitations of radar systems and comparison with other techniques that do not rely on radars for detection, tracking, and classification of aerial threats are provided.
Comparative Analysis of Radar Cross Section Based UAV Classification Techniques
Dec 17, 2021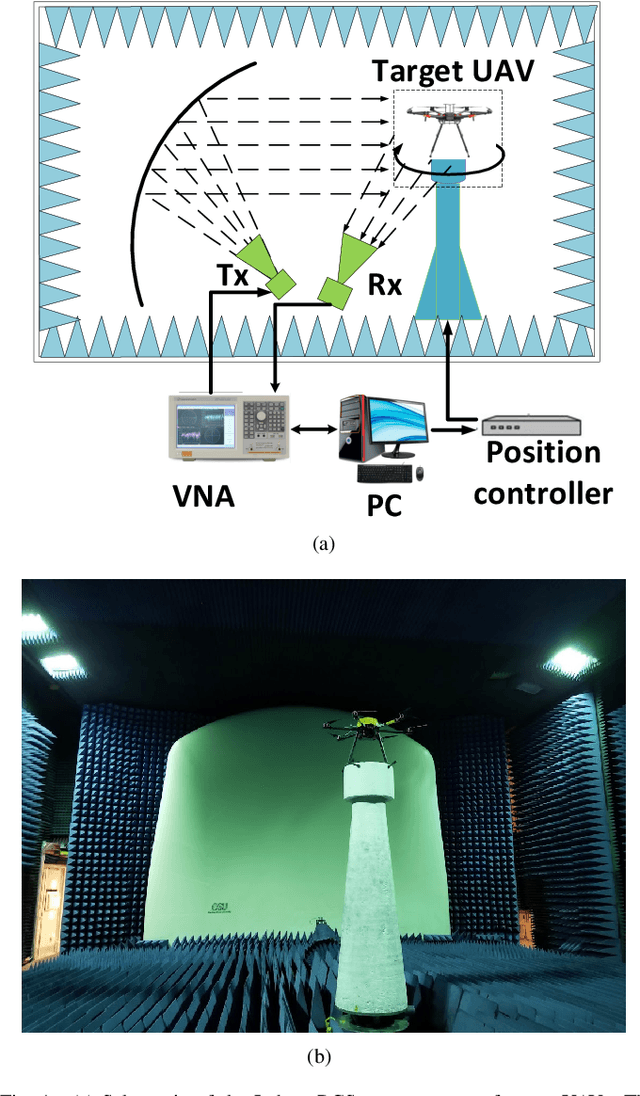
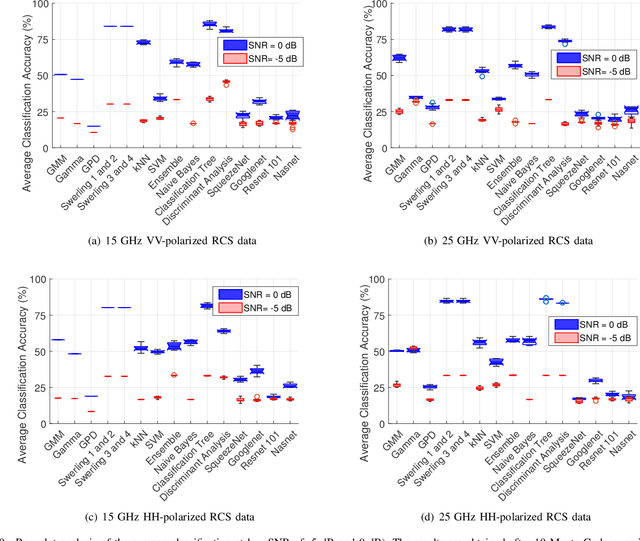
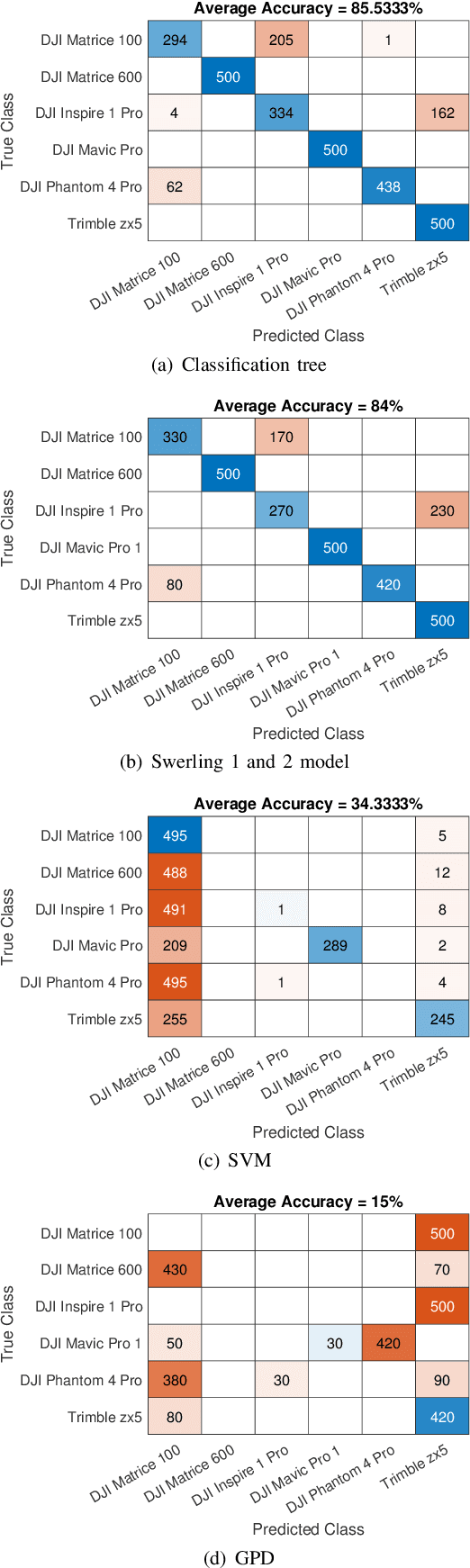
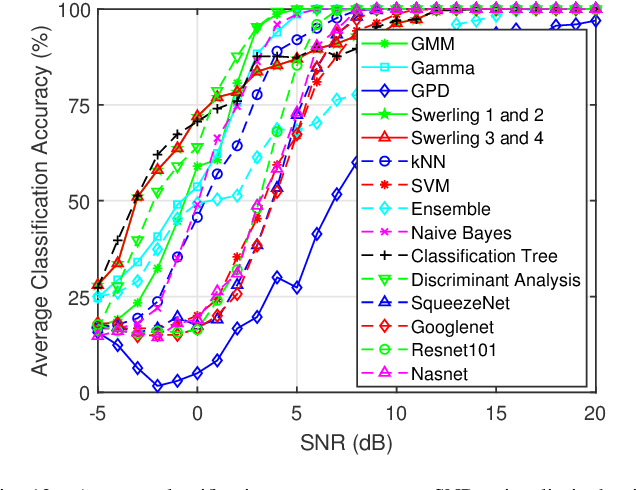
This work investigates the problem of unmanned aerial vehicles (UAVs) identification using their radar crosssection (RCS) signature. The RCS of six commercial UAVs are measured at 15 GHz and 25 GHz in an anechoic chamber, for both vertical-vertical and horizontal-horizontal polarization. The RCS signatures are used to train 15 different classification algorithms, each belonging to one of three different categories: statistical learning (SL), machine learning (ML), and deep learning (DL). The study shows that while the classification accuracy of all the algorithms increases with the signal-to-noise ratio (SNR), the ML algorithm achieved better accuracy than the SL and DL algorithms. For example, the classification tree ML achieves an accuracy of 98.66% at 3 dB SNR using the 15 GHz VV-polarized RCS test data from the UAVs. We investigate the classification accuracy using Monte Carlo analysis with the aid of boxplots, confusion matrices, and classification plots. On average, the accuracy of the classification tree ML model performed better than the other algorithms, followed by the Peter Swerling statistical models and the discriminant analysis ML model. In general, the classification accuracy of the ML and SL algorithms outperformed the DL algorithms (Squeezenet, Googlenet, Nasnet, and Resnet 101) considered in the study. Furthermore, the computational time of each algorithm is analyzed. The study concludes that while the SL algorithms achieved good classification accuracy, the computational time was relatively long when compared to the ML and DL algorithms. Also, the study shows that the classification tree achieved the fastest average classification time of about 0.46 ms.
Characterizing the UAV-to-Machine UWB Radio Channel in Smart Factories
Apr 19, 2021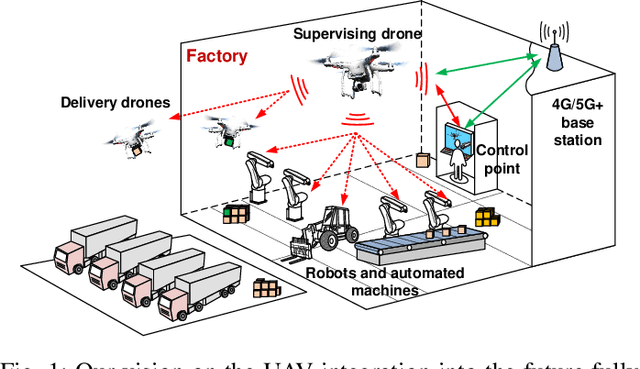
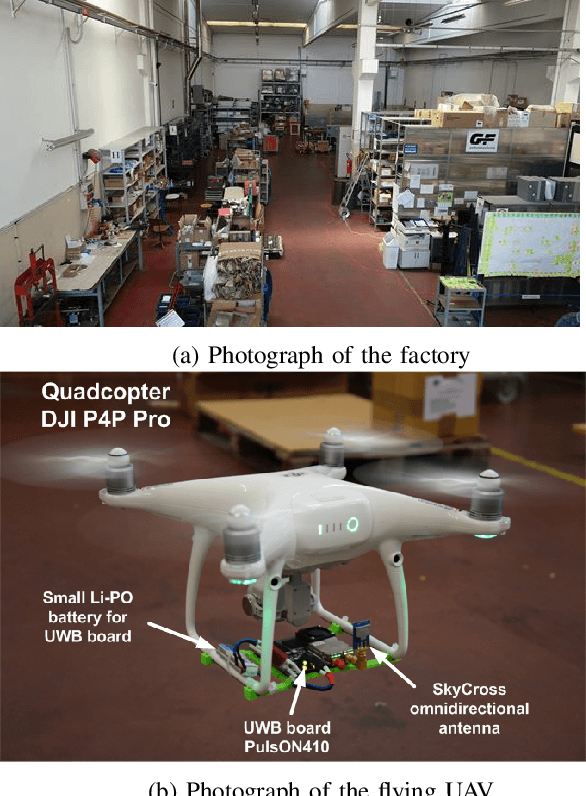
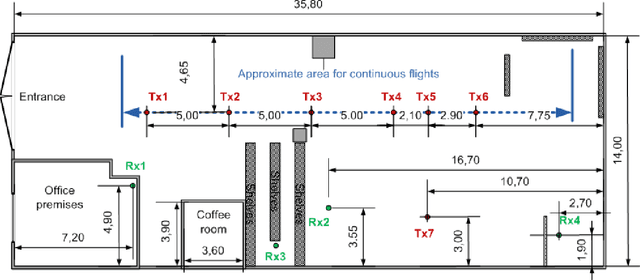
In this work, the results of Ultra-Wideband air-to-ground measurements carried out in a real-world factory environment are presented and discussed. With intelligent in-dustrial deployments in mind, we envision a scenario where the Unmanned Aerial Vehicle can be used as a supplementary tool for factory operation, optimization and control. Measurements address narrow band and wide band characterization of the wireless radio channel, and can be used for link budget calculation, interference studies and time dispersion assessment in real factories, without the usual limitation for both radio terminals to be close to ground. The measurements are performed at different locations and different heights over the 3.1-5.3 GHz band. Some fundamental propagation parameters values are determined vs. distance, height and propagation conditions. The measurements are complemented with, and compared to, conventional ground-to-ground measurements with the same setup. The conducted measurement campaign gives an insight for realizing wireless applications in smart connected factories, including UAV-assisted applications.
Millimeter-Wave UAV Coveragein Urban Environments
Apr 05, 2021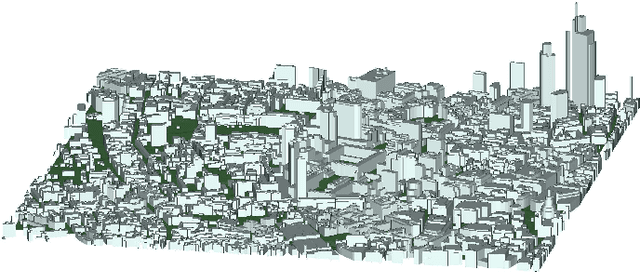
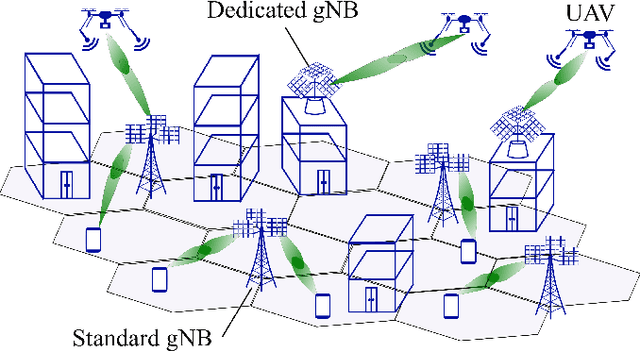
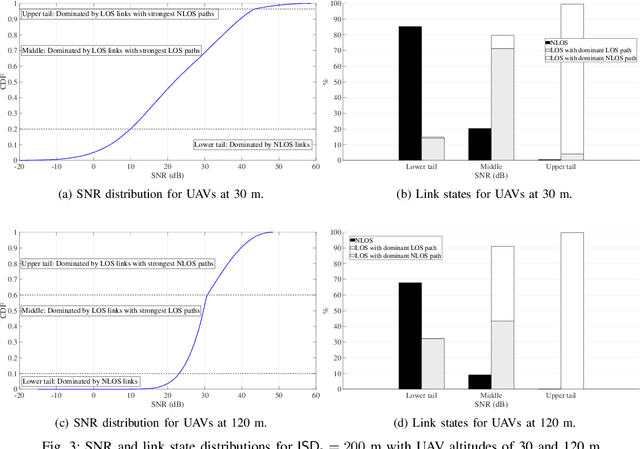
With growing interest in mmWave connectivity for UAVs, a basic question is whether networks intended for terrestrial users can provide sufficient aerial coverage as well. To assess this possibility, the paper proposes a novel evaluation methodology using generative models trained on detailed ray tracing data. These models capture complex propagation characteristics and can be readily combined with antenna and beamforming assumptions. Extensive simulation using these models indicate that standard (street-level and downtilted) base stations at typical microcellular densities can indeed provide satisfactory UAV coverage. Interestingly, the coverage is possible via a conjunction of antenna sidelobes and strong reflections. With sparser deployments, the coverage is only guaranteed at progressively higher altitudes. Additional dedicated (rooftop-mounted and uptilted) base stations strengthen the coverage provided that their density is comparable to that of the standard deployment, and would be instrumental for sparse deployments of the latter.
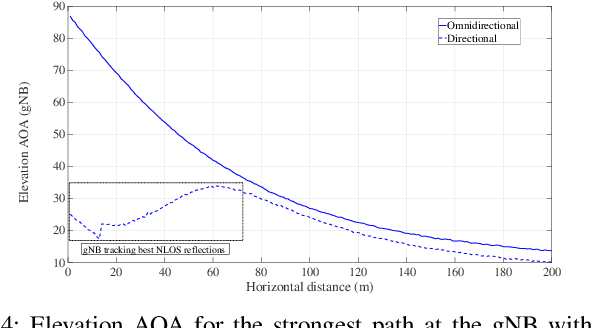
Lightweight UAV-based Measurement System for Air-to-Ground Channels at 28 GHz
Mar 31, 2021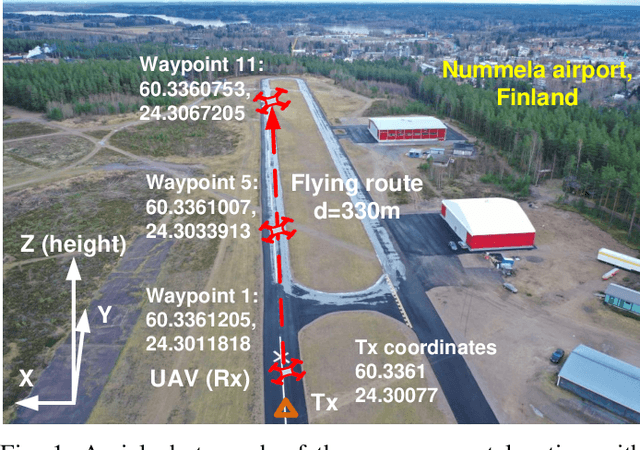
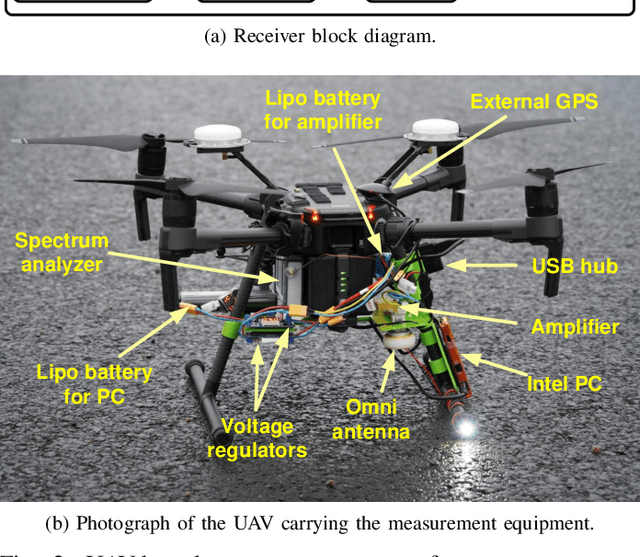
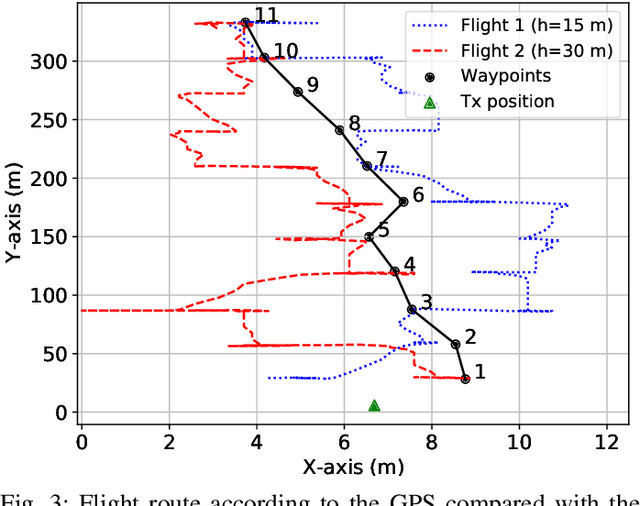
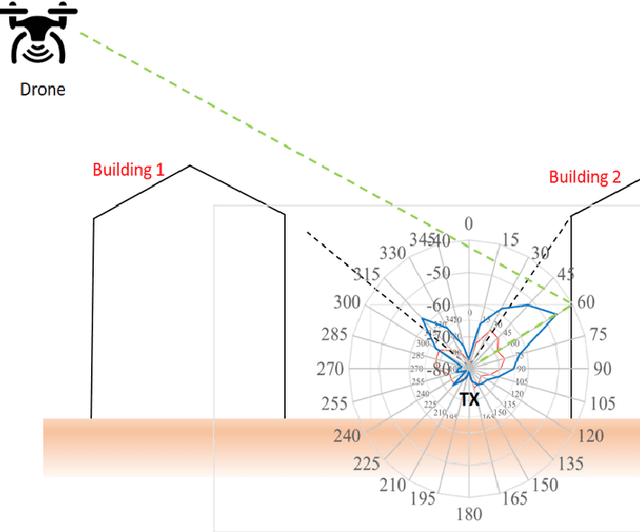
Wireless communication at millimeter wave frequencies has attracted considerable attention for the delivery of high-bit-rate connectivity to unmanned aerial vehicles (UAVs). However, conducting the channel measurements necessary to assess communication at these frequencies has been challenging due to the severe payload and power restrictions in commercial UAVs. This work presents a novel lightweight (approximately 1.3 kg) channel measurement system at 28 GHz installed on a commercially available UAV. A ground transmitter equipped with a horn antenna conveys sounding signals to a UAV equipped with a lightweight spectrum analyzer. We demonstrate that the measurements can be highly influenced by the antenna pattern as shaped by the UAV's frame. A calibration procedure is presented to correct for the resulting angular variations in antenna gain. The measurement setup is then validated on real flights from an airstrip at distances in excess of 300 m.
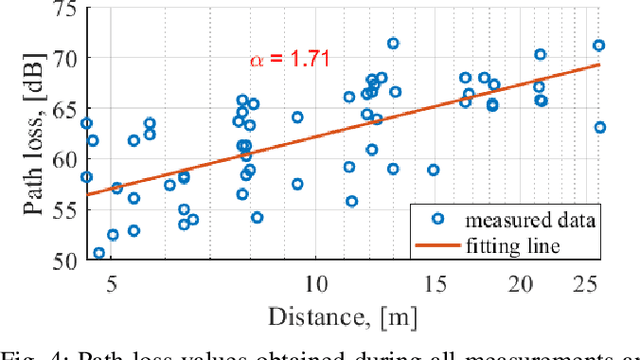
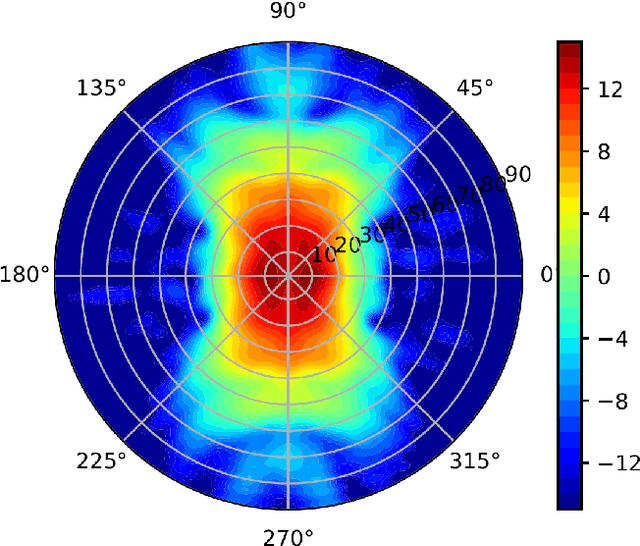
Empirical Characterization of Air-to-ground Propagation at mm-Wave Frequencies in Dense Urban Environment
Jan 04, 2021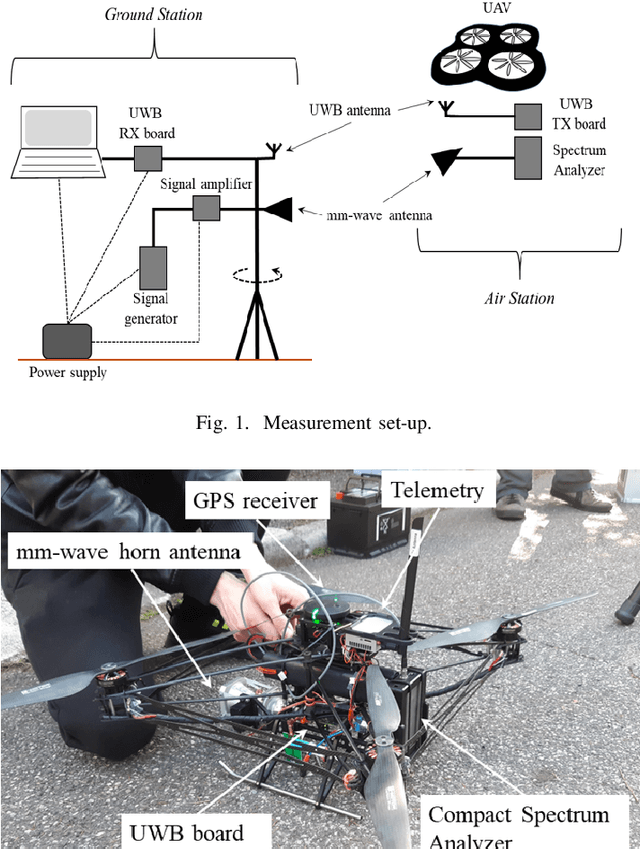
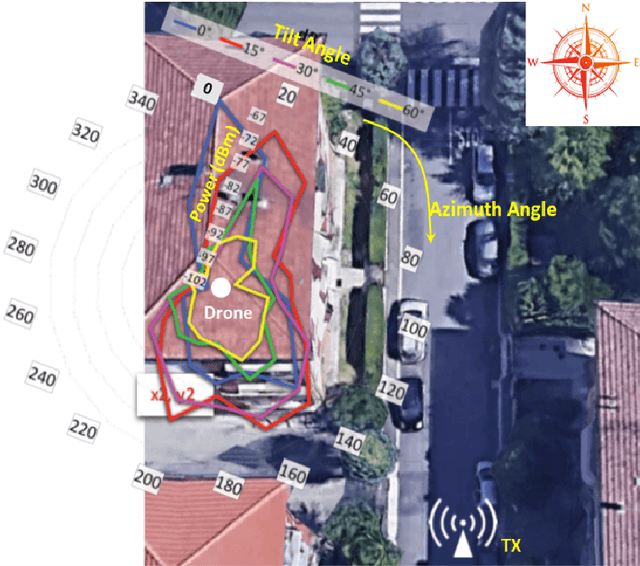
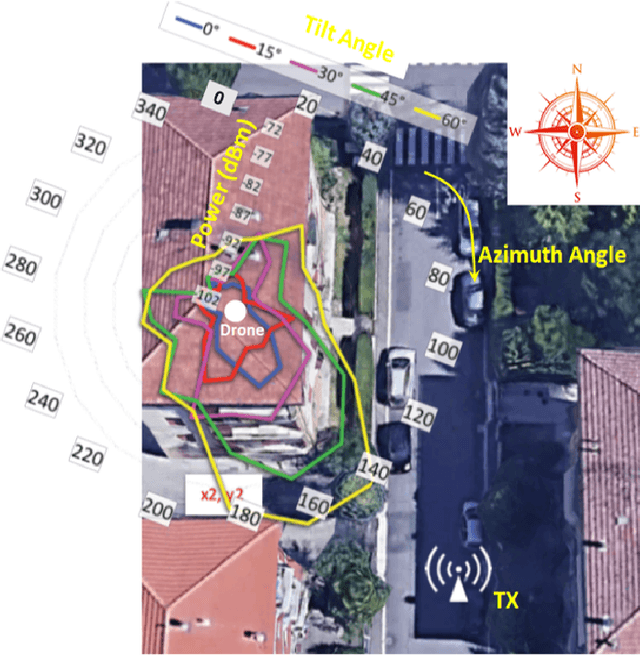
In the present study, a measurement setup utilizing mm-wave transceivers with steerable directive antennas, mounted on both a customized UAV and a ground station has been used to study Air-to-Ground (A2G) radio links and, more generally, full-3D mm-wave propagation in urban environment. We evaluate the double-directional characteristics of the channel by rotating the antennas, deriving Power-Angle Profiles at both link ends. Preliminary results provide useful understanding of A2G propagation, e.g. the influence of the antenna tilt angles, or the mechanisms allowing for the signal to propagate from street canyons to the air.