 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey on Detection, Classification, and Tracking of Aerial Threats using Radar and Communications Systems
Feb 08, 2024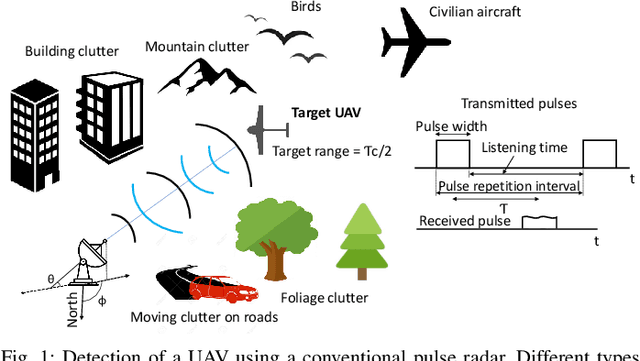
The use of unmanned aerial vehicles (UAVs) for a variety of commercial, civilian, and defense applications has increased many folds in recent years. While UAVs are expected to transform future air operations, there are instances where they can be used for malicious purposes. In this context, the detection, classification, and tracking (DCT) of UAVs (DCT-U) for safety and surveillance of national air space is a challenging task when compared to DCT of manned aerial vehicles. In this survey, we discuss the threats and challenges from malicious UAVs and we subsequently study three radio frequency (RF)-based systems for DCT-U. These RF-based systems include radars, communication systems, and RF analyzers. Radar systems are further divided into conventional and modern radar systems, while communication systems can be used for joint communications and sensing (JC&S) in active mode and act as a source of illumination to passive radars for DCT-U. The limitations of the three RF-based systems are also provided. The survey briefly discusses non-RF systems for DCT-U and their limitations. Future directions based on the lessons learned are provided at the end of the survey.
A Survey on Detection, Tracking, and Classification of Aerial Threats using Radars and Communications Systems
Nov 18, 2022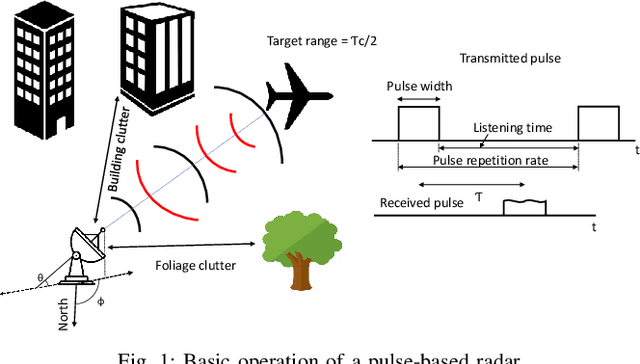



The use of unmanned aerial vehicles (UAVs) for different applications has increased many folds in recent years. The UAVs are expected to change the future air operations. However, there are instances where the UAVs can be used for malicious purposes. The detection, tracking, and classification of UAVs is challenging compared to manned aerial vehicles (MAVs) mainly due to small size, complex shapes, and ability to fly close to the terrain and in autonomous flight patterns in swarms. In this survey, we will discuss current and future aerial threats, and provide an overview of radar systems to counter such threats. We also study the performance parameters of radar systems for the detection, tracking, and classification of UAVs compared to MAVs. In addition to dedicated radar systems, we review the use of joint communication-radar (JCR) systems, as well as passive monitoring of changes in the common communication signals, e.g., FM, LTE, and any transmissions that may radiate from a UAV, for the detection, tracking, and classification of UAVs are provided. Finally, limitations of radar systems and comparison with other techniques that do not rely on radars for detection, tracking, and classification of aerial threats are provided.
Comparative Analysis of Radar Cross Section Based UAV Classification Techniques
Dec 17, 2021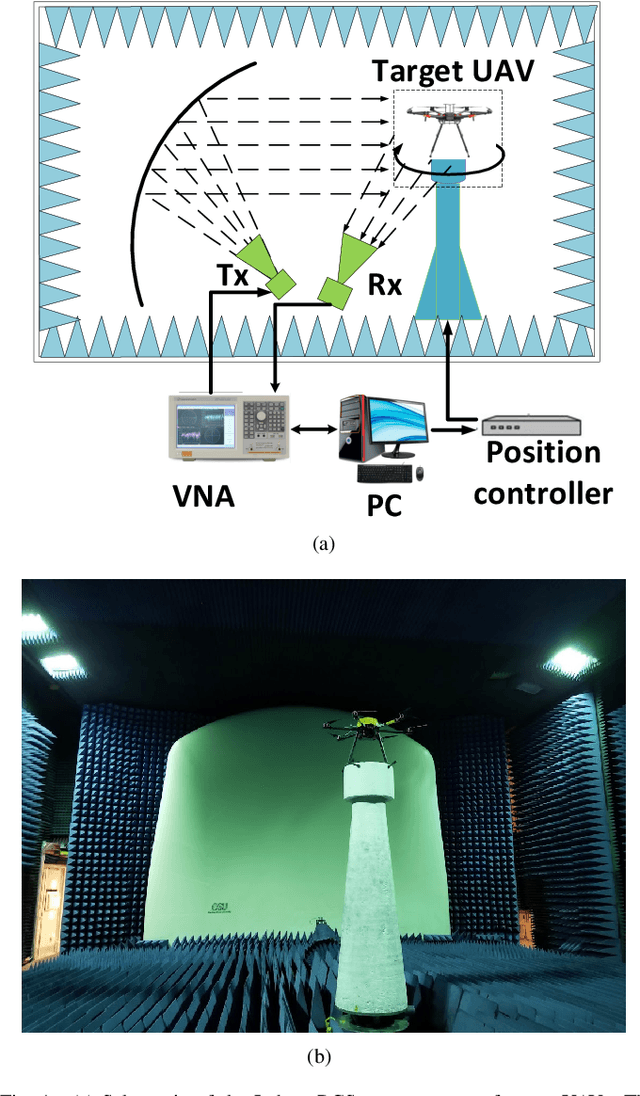
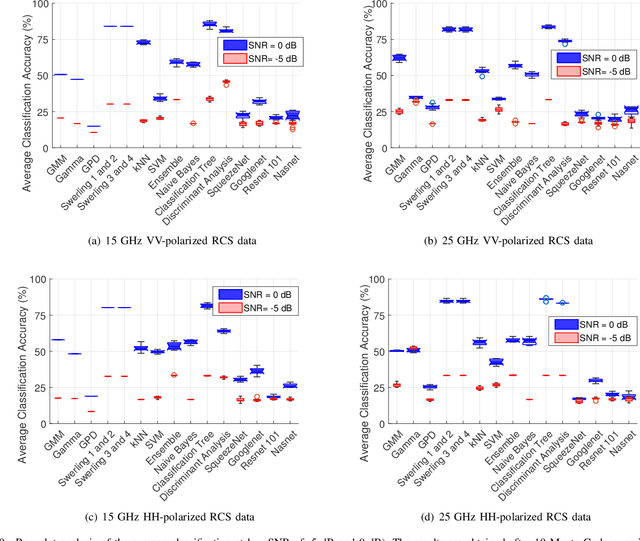
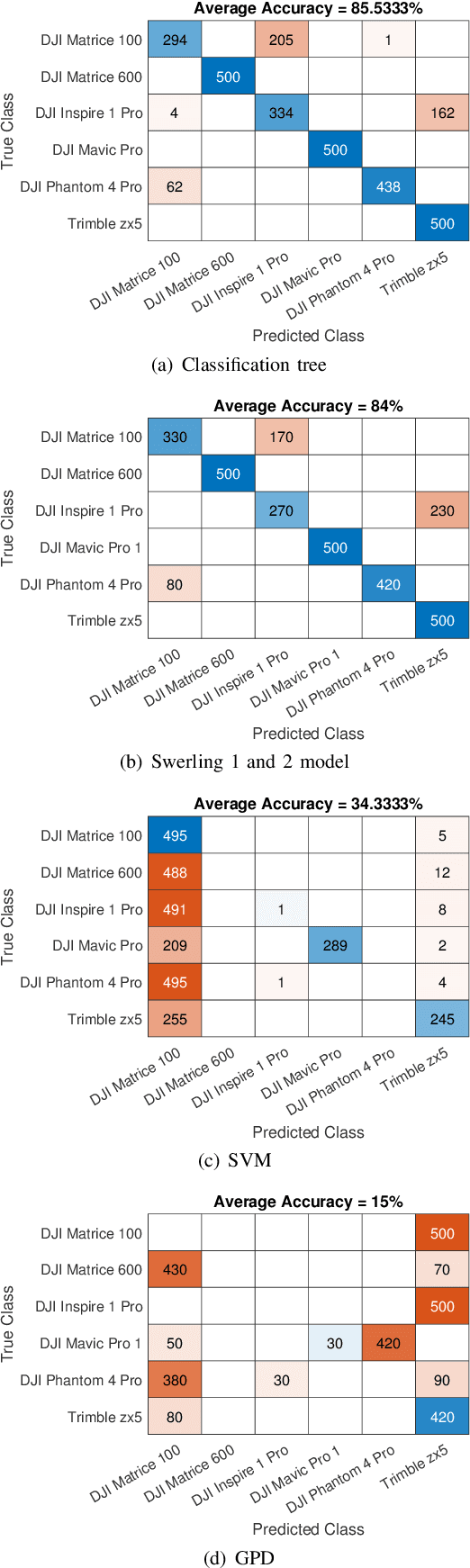
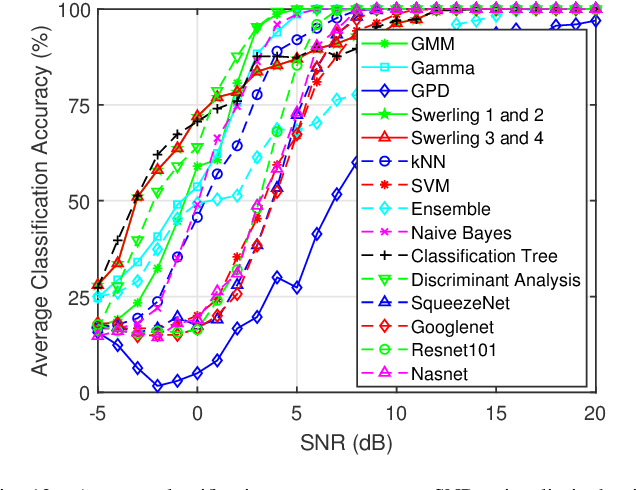
This work investigates the problem of unmanned aerial vehicles (UAVs) identification using their radar crosssection (RCS) signature. The RCS of six commercial UAVs are measured at 15 GHz and 25 GHz in an anechoic chamber, for both vertical-vertical and horizontal-horizontal polarization. The RCS signatures are used to train 15 different classification algorithms, each belonging to one of three different categories: statistical learning (SL), machine learning (ML), and deep learning (DL). The study shows that while the classification accuracy of all the algorithms increases with the signal-to-noise ratio (SNR), the ML algorithm achieved better accuracy than the SL and DL algorithms. For example, the classification tree ML achieves an accuracy of 98.66% at 3 dB SNR using the 15 GHz VV-polarized RCS test data from the UAVs. We investigate the classification accuracy using Monte Carlo analysis with the aid of boxplots, confusion matrices, and classification plots. On average, the accuracy of the classification tree ML model performed better than the other algorithms, followed by the Peter Swerling statistical models and the discriminant analysis ML model. In general, the classification accuracy of the ML and SL algorithms outperformed the DL algorithms (Squeezenet, Googlenet, Nasnet, and Resnet 101) considered in the study. Furthermore, the computational time of each algorithm is analyzed. The study concludes that while the SL algorithms achieved good classification accuracy, the computational time was relatively long when compared to the ML and DL algorithms. Also, the study shows that the classification tree achieved the fastest average classification time of about 0.46 ms.
Hierarchical Learning Framework for UAV Detection and Identification
Jul 10, 2021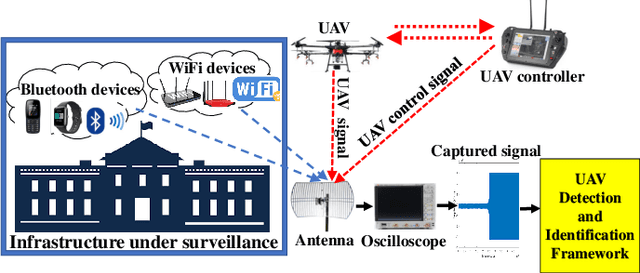
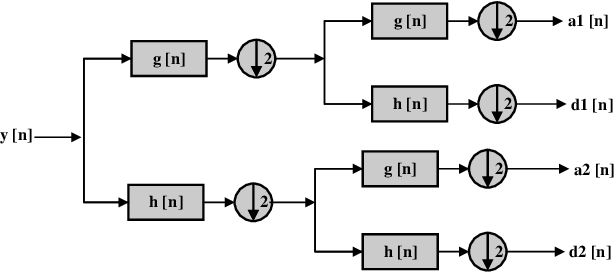
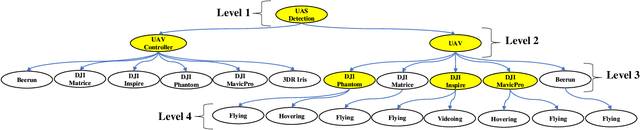
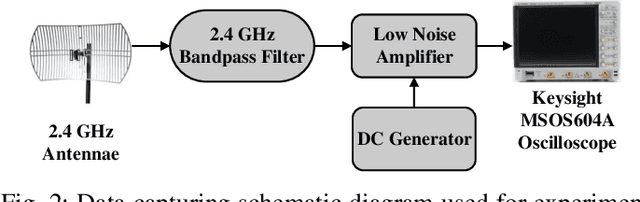
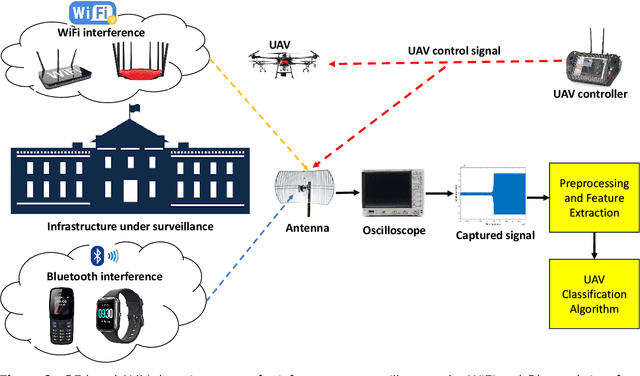
The ubiquity of unmanned aerial vehicles (UAVs) or drones is posing both security and safety risks to the public as UAVs are now used for cybercrimes. To mitigate these risks, it is important to have a system that can detect or identify the presence of an intruding UAV in a restricted environment. In this work, we propose a radio frequency (RF) based UAV detection and identification system by exploiting signals emanating from both the UAV and its flight controller, respectively. While several RF devices (i.e., Bluetooth and WiFi devices) operate in the same frequency band as UAVs, the proposed framework utilizes a semi-supervised learning approach for the detection of UAV or UAV's control signals in the presence of other wireless signals such as Bluetooth and WiFi. The semi-supervised learning approach uses stacked denoising autoencoder and local outlier factor algorithms. After the detection of UAV or UAV's control signals, the signal is decomposed by using Hilbert-Huang transform and wavelet packet transform to extract features from the time-frequency-energy domain of the signal. The extracted feature sets are used to train a three-level hierarchical classifier for identifying the type of signals (i.e., UAV or UAV control signal), UAV models, and flight mode of UAV. To demonstrate the feasibility of the proposed framework, we carried out an outdoor experiment for data collection using six UAVs, five Bluetooth devices, and two WiFi devices. The acquired data is called Cardinal RF (CardRF) dataset, and it is available for public use to foster UAV detection and identification research.
Semi-supervised Learning Framework for UAV Detection
Apr 14, 2021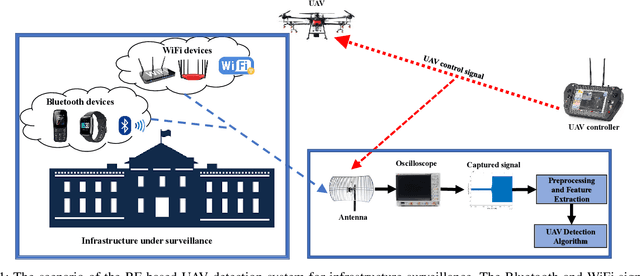
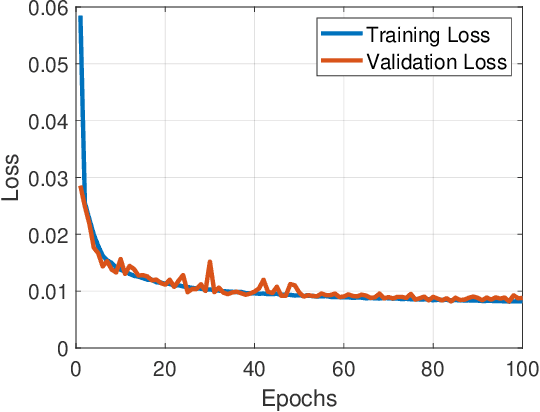
The use of supervised learning with various sensing techniques such as audio, visual imaging, thermal sensing, RADAR, and radio frequency (RF) have been widely applied in the detection of unmanned aerial vehicles (UAV) in an environment. However, little or no attention has been given to the application of unsupervised or semi-supervised algorithms for UAV detection. In this paper, we proposed a semi-supervised technique and architecture for detecting UAVs in an environment by exploiting the RF signals (i.e., fingerprints) between a UAV and its flight-controller communication under wireless inference such as Bluetooth and WiFi. By decomposing the RF signals using a two-level wavelet packet transform, we estimated the second moment statistic (i.e., variance) of the coefficients in each packet as a feature set. We developed a local outlier factor model as the UAV detection algorithm using the coefficient variances of the wavelet packets from WiFi and Bluetooth signals. When detecting the presence of RF-based UAV, we achieved an accuracy of 96.7$\%$ and 86$\%$ at a signal-to-noise ratio of 30~dB and 18~dB, respectively. The application of this approach is not limited to UAV detection as it can be extended to the detection of rogue RF devices in an environment.
Radar Cross Section Based Statistical Recognition of UAVs at Microwave Frequencies
Feb 23, 2021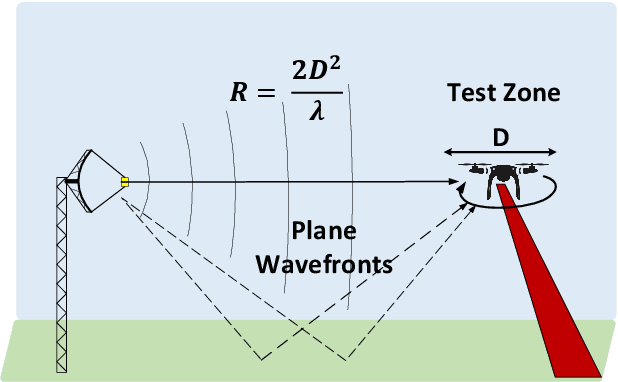
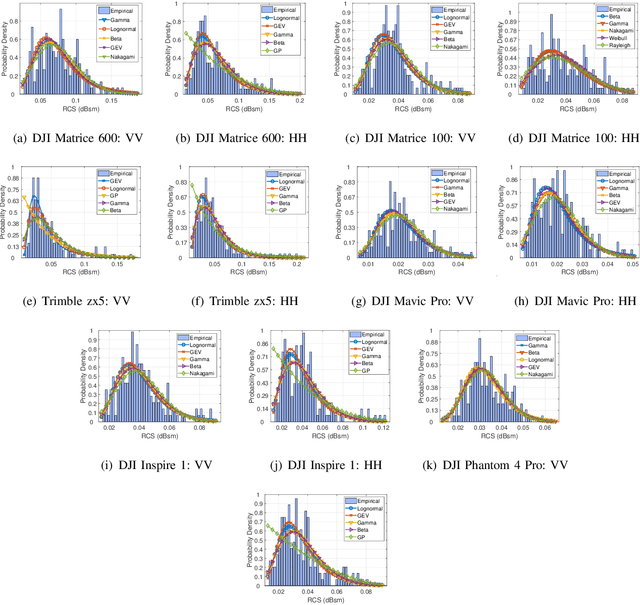
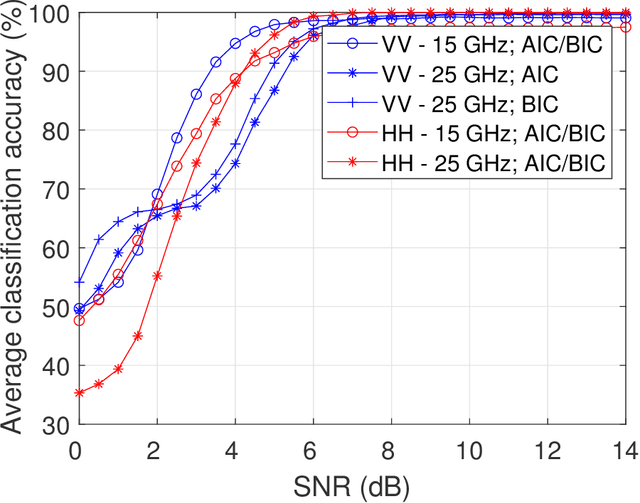
This paper presents a radar cross-section (RCS)-based statistical recognition system for identifying/ classifying unmanned aerial vehicles (UAVs) at microwave frequencies. First, the paper presents the results of the vertical (VV) and horizontal (HH) polarization RCS measurement of six commercial UAVs at 15 GHz and 25 GHz in a compact range anechoic chamber. The measurement results show that the average RCS of the UAVs depends on shape, size, material composition of the target UAV as well as the azimuth angle, frequency, and polarization of the illuminating radar. Afterward, radar characterization of the target UAVs is achieved by fitting the RCS measurement data to 11 different statistical models. From the model selection analysis, we observe that the lognormal, generalized extreme value, and gamma distributions are most suitable for modeling the RCS of the commercial UAVs while the Gaussian distribution performed relatively poorly. The best UAV radar statistics forms the class conditional probability densities for the proposed UAV statistical recognition system. The performance of the UAV statistical recognition system is evaluated at different signal noise ratio (SNR) with the aid of Monte Carlo analysis. At an SNR of 10 dB, the average classification accuracy of 97.43% or better is achievable.
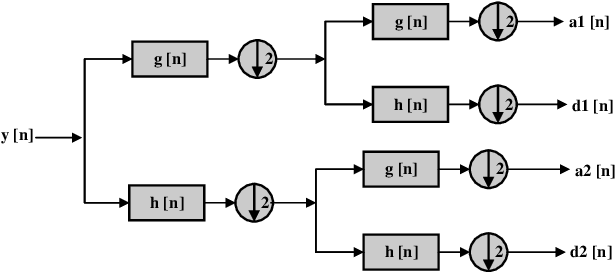
Wavelet Transform Analytics for RF-Based UAV Detection and Identification System Using Machine Learning
Feb 23, 2021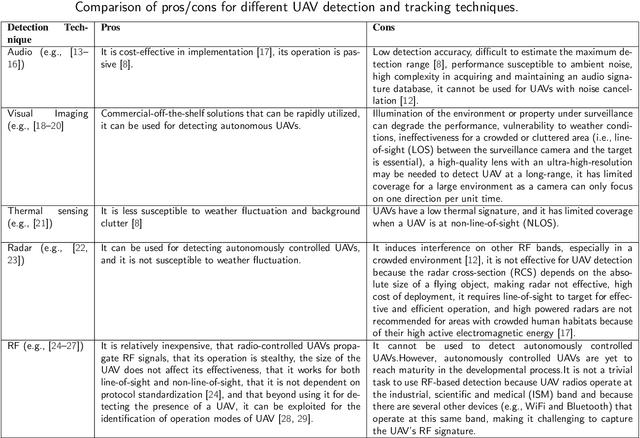
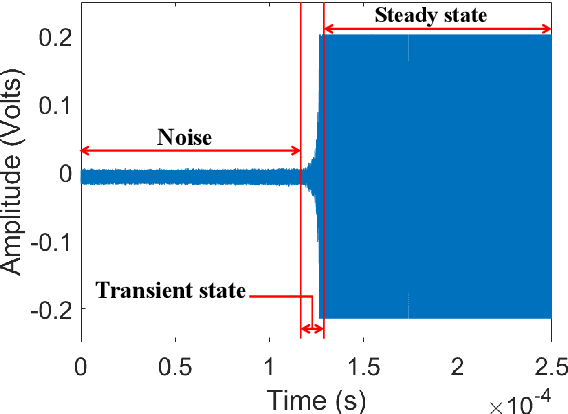
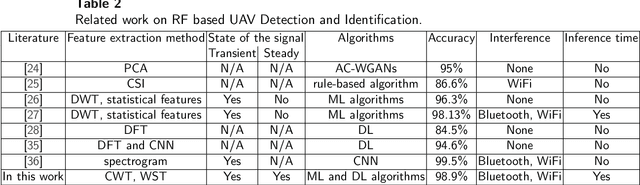
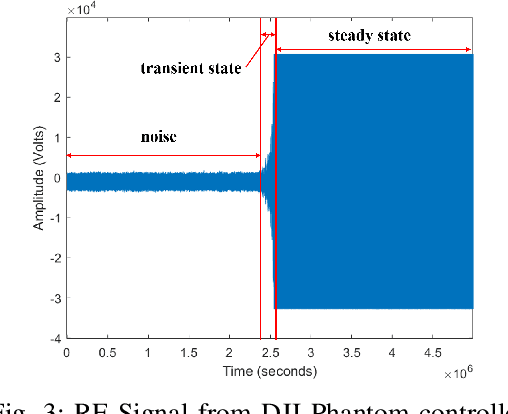
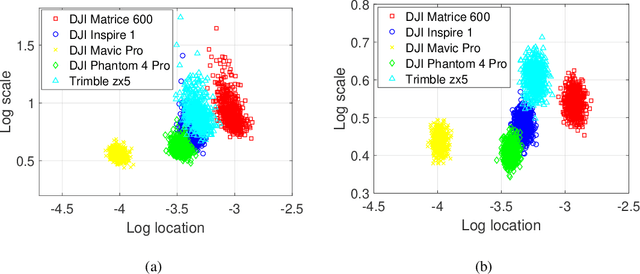
In this work, we performed a thorough comparative analysis on a radio frequency (RF) based drone detection and identification system (DDI) under wireless interference, such as WiFi and Bluetooth, by using machine learning algorithms, and a pre-trained convolutional neural network-based algorithm called SqueezeNet, as classifiers. In RF signal fingerprinting research, the transient and steady state of the signals can be used to extract a unique signature from an RF signal. By exploiting the RF control signals from unmanned aerial vehicles (UAVs) for DDI, we considered each state of the signals separately for feature extraction and compared the pros and cons for drone detection and identification. Using various categories of wavelet transforms (discrete wavelet transform, continuous wavelet transform, and wavelet scattering transform) for extracting features from the signals, we built different models using these features. We studied the performance of these models under different signal to noise ratio (SNR) levels. By using the wavelet scattering transform to extract signatures (scattergrams) from the steady state of the RF signals at 30 dB SNR, and using these scattergrams to train SqueezeNet, we achieved an accuracy of 98.9% at 10 dB SNR.
FPGA prototyping of synchronized chaotic map for UAV secure communication
Dec 24, 2020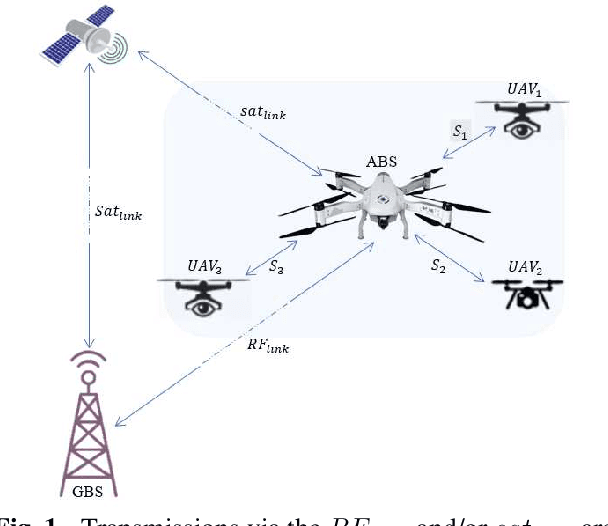
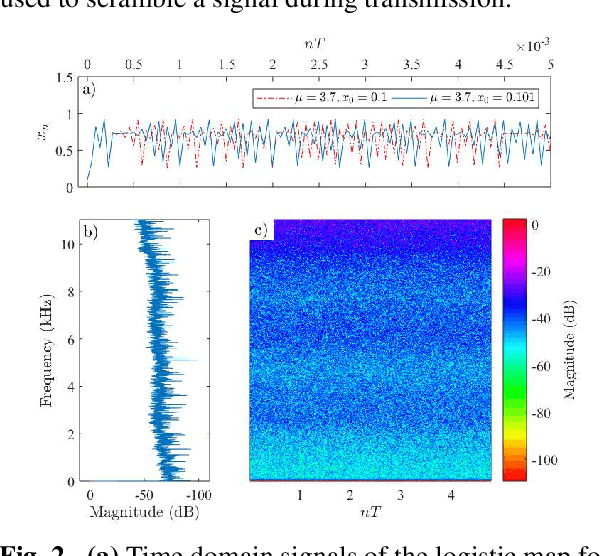

We propose a design that uses the principle of chaos for UAV secure communication. A UAV identified as an aerial base station communicates with a ground base station over an RF channel. The communication units have dynamics based on the logistic map. The map is chaotic in the appropriate parameter space. Its states are non-periodic, broadband, and noise-like in the frequency domain. They are useful for spreading information during transmission, making it difficult for an eavesdropper to recover the modulated message since state prediction is ultimately impossible. To retrieve it, we propose a variable feedback controller. It asymptotically stabilizes the error dynamics when the information source is off. During transmission, the controller synchronizes the units such that the error contains signatures of the information signal. Therefore, the information signal is retrievable by a suitable detection mechanism. Security depends on the confidentiality of the map, the variable feedback controller, including its scale factor and bounded feedback gain, and the designer`s choice of invertible function for use in the scrambling and descrambling process. Also, the method is less prone to jamming attacks and multipath effects as the broadband spectrum can be used to randomly select RF channels. It uses only a few simple algorithms, including a correlation summation and a detection mechanism. The algorithms collect subsamples of the received signal sequences and averages over each subsample length. The method requires minimal programming efforts and low hardware resource utilization. It is energy-efficient, which is a vital consideration for any UAV security model. Moreover, we realize a prototype of the communication system on field-programmable gate arrays. We presented a digital design of the secure communication system involving the transmission of bitstreams between the ABS and GBS.