 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeISAC with Backscattering RFID Tags: Beamforming and Codebook Design
Apr 16, 2026This paper explores an integrated sensing and communication (ISAC) system with backscattering RFID tags. In this setup, an access point employs communication beams to serve communication users while leveraging a sensing beam to interrogate RFID tags. Under the total transmit power constraint of the system, our objective is to design a joint sensing and communication beamforming codebook by considering the tag interrogation and communication requirements. To lay a foundation for the codebook design problem, we first study the beamforming design problem in a single-tag scenario and investigate two approaches: (i) a zero-forcing approach with optimized sensing/communication power allocation, for which a closed-form solution is derived under a dominant sensitivity condition, and (ii) a joint sensing and communication beamforming design obtained by transmit power minimization. Then, we investigate the codebook design problem in a multi-tag scenario. To resolve this, we propose a sector-based joint sensing and communication beamforming codebook that scans the region of interest. For each sector, semidefinite relaxation and generalized Benders decomposition are employed to handle the resulting optimization. The simulation results show that the proposed joint beamforming designs can effectively mitigate the mutual interference between sensing and communication functionalities, thus enhancing the interrogation range of the tags with minimized transmit power. Also, the efficacy of the proposed sector-based codebook design has been demonstrated in terms of interrogation success rate, offering a promising approach for the ISAC-backscattering systems.
Wireless Digital Twin Calibration: Refining DFT-Domain Channel Information
Mar 17, 2026Wireless digital twins can be leveraged to provide site-specific synthetic channel information through precise physical modeling and signal propagation simulations. This can help reduce the overhead of channel state information (CSI) acquisition, particularly needed for large-scale MIMO systems. For high-quality digital twin channels, the classical approach is to increase the digital twin fidelity via more accurate modeling of the environment, propagation, and hardware. This, however, comes with high computational cost, making it unsuitable for real-time applications. In this paper, we propose a new framework that, instead of calibrating the digital twin model itself, calibrates the DFT-domain channel information to reduce the gap between the low-fidelity digital twin and its high-fidelity counterpart or the real world. This allows systems to leverage a low-complexity digital twin for generating real-time channel information without compromising quality. To evaluate the effectiveness of the proposed approach, we adopt codebook-based CSI feedback as a case study, where refined synthetic channel information is used to identify the most relevant DFT codewords for each user. Simulation results demonstrate the effectiveness of the proposed digital twin calibration approach in achieving high CSI acquisition accuracy while reducing the computational overhead of the digital twin. This paves the way for realizing digital twin assisted wireless systems.
Knowledge Distillation for mmWave Beam Prediction Using Sub-6 GHz Channels
Feb 04, 2026Beamforming in millimeter-wave (mmWave) high-mobility environments typically incurs substantial training overhead. While prior studies suggest that sub-6 GHz channels can be exploited to predict optimal mmWave beams, existing methods depend on large deep learning (DL) models with prohibitive computational and memory requirements. In this paper, we propose a computationally efficient framework for sub-6 GHz channel-mmWave beam mapping based on the knowledge distillation (KD) technique. We develop two compact student DL architectures based on individual and relational distillation strategies, which retain only a few hidden layers yet closely mimic the performance of large teacher DL models. Extensive simulations demonstrate that the proposed student models achieve the teacher's beam prediction accuracy and spectral efficiency while reducing trainable parameters and computational complexity by 99%.
Generative Decompression: Optimal Lossy Decoding Against Distribution Mismatch
Feb 03, 2026This paper addresses optimal decoding strategies in lossy compression where the assumed distribution for compressor design mismatches the actual (true) distribution of the source. This problem has immediate relevance in standardized communication systems where the decoder acquires side information or priors about the true distribution that are unavailable to the fixed encoder. We formally define the mismatched quantization problem, demonstrating that the optimal reconstruction rule, termed generative decompression, aligns with classical Bayesian estimation by taking the conditional expectation under the true distribution given the quantization indices and adapting it to fixed-encoder constraints. This strategy effectively performs a generative Bayesian correction on the decoder side, strictly outperforming the conventional centroid rule. We extend this framework to transmission over noisy channels, deriving a robust soft-decoding rule that quantifies the inefficiency of standard modular source--channel separation architectures under mismatch. Furthermore, we generalize the approach to task-oriented decoding, showing that the optimal strategy shifts from conditional mean estimation to maximum a posteriori (MAP) detection. Experimental results on Gaussian sources and deep-learning-based semantic classification demonstrate that generative decompression closes a vast majority of the performance gap to the ideal joint-optimization benchmark, enabling adaptive, high-fidelity reconstruction without modifying the encoder.
LWM-Spectro: A Foundation Model for Wireless Baseband Signal Spectrograms
Jan 13, 2026The received in-phase and quadrature (I/Q) baseband signals inherently encode physical-layer and channel characteristics of wireless links. Learning robust and transferable representations directly from such raw signals, however, remains challenging due to heterogeneous communication systems, diverse propagation environments, and limited labeled data. To address this, we present LWM-Spectro, a transformer-based foundation model pretrained on large-scale I/Q data represented as time-frequency spectrograms. The model leverages self-supervised masked modeling, contrastive learning, and a mixture-of-experts (MoE) architecture to learn general-purpose wireless representations. These representations transfer effectively to downstream tasks such as modulation classification and joint SNR/mobility recognition, even with minimal supervision. Across tasks, LWM-Spectro consistently outperforms state-of-the-art deep learning baselines in both few-shot and data-rich regimes, providing a unified foundation for wireless learning.
Wireless Dataset Similarity: Measuring Distances in Supervised and Unsupervised Machine Learning
Jan 03, 2026This paper introduces a task- and model-aware framework for measuring similarity between wireless datasets, enabling applications such as dataset selection/augmentation, simulation-to-real (sim2real) comparison, task-specific synthetic data generation, and informing decisions on model training/adaptation to new deployments. We evaluate candidate dataset distance metrics by how well they predict cross-dataset transferability: if two datasets have a small distance, a model trained on one should perform well on the other. We apply the framework on an unsupervised task, channel state information (CSI) compression, using autoencoders. Using metrics based on UMAP embeddings, combined with Wasserstein and Euclidean distances, we achieve Pearson correlations exceeding 0.85 between dataset distances and train-on-one/test-on-another task performance. We also apply the framework to a supervised beam prediction in the downlink using convolutional neural networks. For this task, we derive a label-aware distance by integrating supervised UMAP and penalties for dataset imbalance. Across both tasks, the resulting distances outperform traditional baselines and consistently exhibit stronger correlations with model transferability, supporting task-relevant comparisons between wireless datasets.
Comparing Stochastic and Ray-tracing Datasets in Machine Learning for Wireless Applications
Dec 13, 2025Machine learning for wireless systems is commonly studied using standardized stochastic channel models (e.g., TDL/CDL/UMa) because of their legacy in wireless communication standardization and their ability to generate data at scale. However, some of their structural assumptions may diverge from real-world propagation. This paper asks when these models are sufficient and when ray-traced (RT) data - a proxy for the real world - provides tangible benefits. To answer these questions, we conduct an empirical study on two representative tasks: CSI compression and temporal channel prediction. Models are trained and evaluated using in-domain, cross-domain, and small-data fine-tuning protocols. Across settings, we observe that stochastic-only evaluation may over- or under-estimate performance relative to RT. These findings support a task-aware recipe where stochastic models can be leveraged for scalable pre-training and for tasks that do not rely on strong spatiotemporal coupling. When that coupling matters, pre-training and evaluation should be grounded in spatially consistent or geometrically similar RT scenarios. This study provides initial guidance to inform future discussions on benchmarking and standardization.
Generative Decoding of Compressed CSI for MIMO Precoding Design
Nov 11, 2025Massive MIMO systems can enhance spectral and energy efficiency, but they require accurate channel state information (CSI), which becomes costly as the number of antennas increases. While machine learning (ML) autoencoders show promise for CSI reconstruction and reducing feedback overhead, they introduce new challenges with standardization, interoperability, and backward compatibility. Also, the significant data collection needed for training makes real-world deployment difficult. To overcome these drawbacks, we propose an ML-based, decoder-only solution for compressed CSI. Our approach uses a standardized encoder for CSI compression on the user side and a site-specific generative decoder at the base station to refine the compressed CSI using environmental knowledge. We introduce two training schemes for the generative decoder: An end-to-end method and a two-stage method, both utilizing a goal-oriented loss function. Furthermore, we reduce the data collection overhead by using a site-specific digital twin to generate synthetic CSI data for training. Our simulations highlight the effectiveness of this solution across various feedback overhead regimes.
Constrained Multimodal Sensing-Aided Communications: A Dynamic Beamforming Design
May 15, 2025Using multimodal sensory data can enhance communications systems by reducing the overhead and latency in beam training. However, processing such data incurs high computational complexity, and continuous sensing results in significant power and bandwidth consumption. This gives rise to a tradeoff between the (multimodal) sensing data acquisition rate and communications performance. In this work, we develop a constrained multimodal sensing-aided communications framework where dynamic sensing and beamforming are performed under a sensing budget. Specifically, we formulate an optimization problem that maximizes the average received signal-to-noise ratio (SNR) of user equipment, subject to constraints on the average number of sensing actions and power budget. Using the Saleh-Valenzuela mmWave channel model, we construct the channel primarily based on position information obtained via multimodal sensing. Stricter sensing constraints reduce the availability of position data, leading to degraded channel estimation and thus lower performance. We apply Lyapunov optimization to solve the problem and derive a dynamic sensing and beamforming algorithm. Numerical evaluations on the DeepSense and Raymobtime datasets show that halving sensing times leads to only up to 7.7% loss in average SNR.
Dynamic Joint Communications and Sensing Precoding Design: A Lyapunov Approach
Mar 18, 2025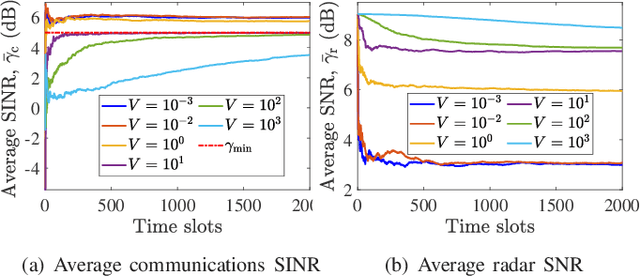


This letter proposes a dynamic joint communications and sensing (JCAS) framework to adaptively design dedicated sensing and communications precoders. We first formulate a stochastic control problem to maximize the long-term average signal-to-noise ratio for sensing, subject to a minimum average communications signal-to-interference-plus-noise ratio requirement and a power budget. Using Lyapunov optimization, specifically the drift-plus-penalty method, we cast the problem into a sequence of per-slot non-convex problems. To solve these problems, we develop a successive convex approximation method. Additionally, we derive a closed-form solution to the per-slot problems based on the notion of zero-forcing. Numerical evaluations demonstrate the efficacy of the proposed methods and highlight their superiority compared to a baseline method based on conventional design.