 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTest-Time Training Done Right
May 29, 2025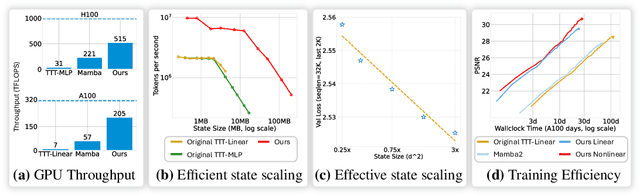

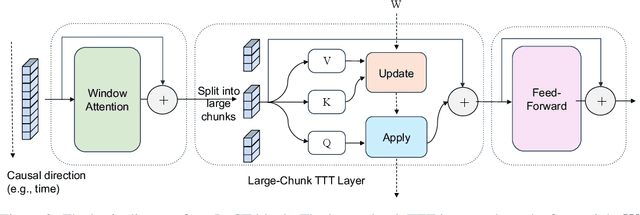
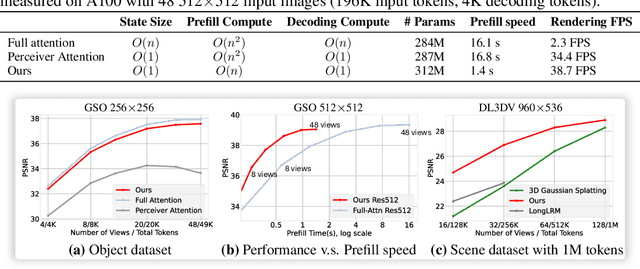
Test-Time Training (TTT) models context dependencies by adapting part of the model's weights (referred to as fast weights) during inference. This fast weight, akin to recurrent states in RNNs, stores temporary memories of past tokens in the current sequence. Existing TTT methods struggled to show effectiveness in handling long-context data, due to their inefficiency on modern GPUs. The TTT layers in many of these approaches operate with extremely low FLOPs utilization (often <5%) because they deliberately apply small online minibatch sizes (e.g., updating fast weights every 16 or 64 tokens). Moreover, a small minibatch implies fine-grained block-wise causal dependencies in the data, unsuitable for data beyond 1D ordered sequences, like sets or N-dimensional grids such as images or videos. In contrast, we pursue the opposite direction by using an extremely large chunk update, ranging from 2K to 1M tokens across tasks of varying modalities, which we refer to as Large Chunk Test-Time Training (LaCT). It improves hardware utilization by orders of magnitude, and more importantly, facilitates scaling of nonlinear state size (up to 40% of model parameters), hence substantially improving state capacity, all without requiring cumbersome and error-prone kernel implementations. It also allows easy integration of sophisticated optimizers, e.g. Muon for online updates. We validate our approach across diverse modalities and tasks, including novel view synthesis with image set, language models, and auto-regressive video diffusion. Our approach can scale up to 14B-parameter AR video diffusion model on sequences up to 56K tokens. In our longest sequence experiment, we perform novel view synthesis with 1 million context length. We hope this work will inspire and accelerate new research in the field of long-context modeling and test-time training. Website: https://tianyuanzhang.com/projects/ttt-done-right
Neural BRDF Importance Sampling by Reparameterization
May 13, 2025Neural bidirectional reflectance distribution functions (BRDFs) have emerged as popular material representations for enhancing realism in physically-based rendering. Yet their importance sampling remains a significant challenge. In this paper, we introduce a reparameterization-based formulation of neural BRDF importance sampling that seamlessly integrates into the standard rendering pipeline with precise generation of BRDF samples. The reparameterization-based formulation transfers the distribution learning task to a problem of identifying BRDF integral substitutions. In contrast to previous methods that rely on invertible networks and multi-step inference to reconstruct BRDF distributions, our model removes these constraints, which offers greater flexibility and efficiency. Our variance and performance analysis demonstrates that our reparameterization method achieves the best variance reduction in neural BRDF renderings while maintaining high inference speeds compared to existing baselines.
RayZer: A Self-supervised Large View Synthesis Model
May 01, 2025



We present RayZer, a self-supervised multi-view 3D Vision model trained without any 3D supervision, i.e., camera poses and scene geometry, while exhibiting emerging 3D awareness. Concretely, RayZer takes unposed and uncalibrated images as input, recovers camera parameters, reconstructs a scene representation, and synthesizes novel views. During training, RayZer relies solely on its self-predicted camera poses to render target views, eliminating the need for any ground-truth camera annotations and allowing RayZer to be trained with 2D image supervision. The emerging 3D awareness of RayZer is attributed to two key factors. First, we design a self-supervised framework, which achieves 3D-aware auto-encoding of input images by disentangling camera and scene representations. Second, we design a transformer-based model in which the only 3D prior is the ray structure, connecting camera, pixel, and scene simultaneously. RayZer demonstrates comparable or even superior novel view synthesis performance than ``oracle'' methods that rely on pose annotations in both training and testing. Project: https://hwjiang1510.github.io/RayZer/
Gaussian Mixture Flow Matching Models
Apr 07, 2025
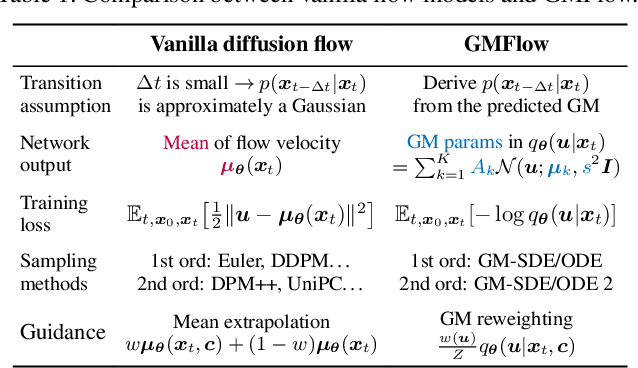

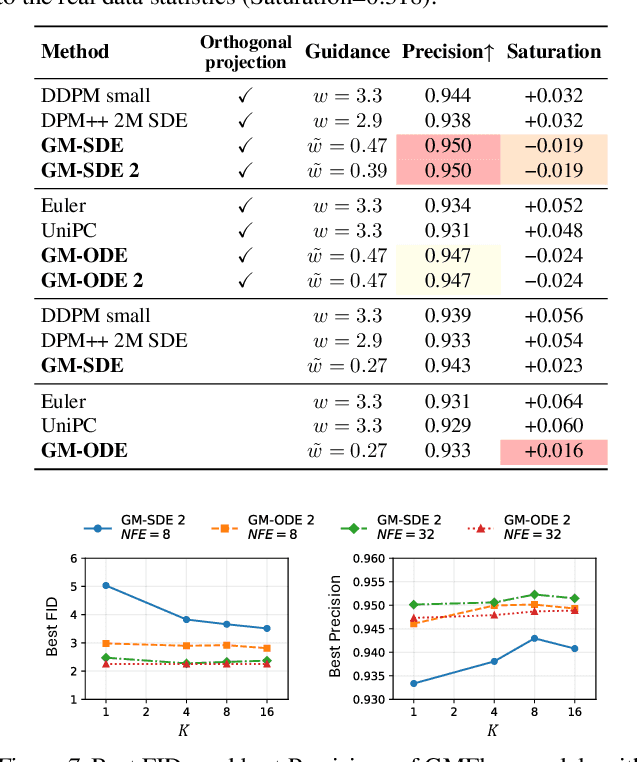
Diffusion models approximate the denoising distribution as a Gaussian and predict its mean, whereas flow matching models reparameterize the Gaussian mean as flow velocity. However, they underperform in few-step sampling due to discretization error and tend to produce over-saturated colors under classifier-free guidance (CFG). To address these limitations, we propose a novel Gaussian mixture flow matching (GMFlow) model: instead of predicting the mean, GMFlow predicts dynamic Gaussian mixture (GM) parameters to capture a multi-modal flow velocity distribution, which can be learned with a KL divergence loss. We demonstrate that GMFlow generalizes previous diffusion and flow matching models where a single Gaussian is learned with an $L_2$ denoising loss. For inference, we derive GM-SDE/ODE solvers that leverage analytic denoising distributions and velocity fields for precise few-step sampling. Furthermore, we introduce a novel probabilistic guidance scheme that mitigates the over-saturation issues of CFG and improves image generation quality. Extensive experiments demonstrate that GMFlow consistently outperforms flow matching baselines in generation quality, achieving a Precision of 0.942 with only 6 sampling steps on ImageNet 256$\times$256.
WorldPrompter: Traversable Text-to-Scene Generation
Apr 02, 2025



Scene-level 3D generation is a challenging research topic, with most existing methods generating only partial scenes and offering limited navigational freedom. We introduce WorldPrompter, a novel generative pipeline for synthesizing traversable 3D scenes from text prompts. We leverage panoramic videos as an intermediate representation to model the 360{\deg} details of a scene. WorldPrompter incorporates a conditional 360{\deg} panoramic video generator, capable of producing a 128-frame video that simulates a person walking through and capturing a virtual environment. The resulting video is then reconstructed as Gaussian splats by a fast feedforward 3D reconstructor, enabling a true walkable experience within the 3D scene. Experiments demonstrate that our panoramic video generation model achieves convincing view consistency across frames, enabling high-quality panoramic Gaussian splat reconstruction and facilitating traversal over an area of the scene. Qualitative and quantitative results also show it outperforms the state-of-the-art 360{\deg} video generators and 3D scene generation models.
MegaSynth: Scaling Up 3D Scene Reconstruction with Synthesized Data
Dec 18, 2024



We propose scaling up 3D scene reconstruction by training with synthesized data. At the core of our work is MegaSynth, a procedurally generated 3D dataset comprising 700K scenes - over 50 times larger than the prior real dataset DL3DV - dramatically scaling the training data. To enable scalable data generation, our key idea is eliminating semantic information, removing the need to model complex semantic priors such as object affordances and scene composition. Instead, we model scenes with basic spatial structures and geometry primitives, offering scalability. Besides, we control data complexity to facilitate training while loosely aligning it with real-world data distribution to benefit real-world generalization. We explore training LRMs with both MegaSynth and available real data. Experiment results show that joint training or pre-training with MegaSynth improves reconstruction quality by 1.2 to 1.8 dB PSNR across diverse image domains. Moreover, models trained solely on MegaSynth perform comparably to those trained on real data, underscoring the low-level nature of 3D reconstruction. Additionally, we provide an in-depth analysis of MegaSynth's properties for enhancing model capability, training stability, and generalization.
EP-CFG: Energy-Preserving Classifier-Free Guidance
Dec 13, 2024



Classifier-free guidance (CFG) is widely used in diffusion models but often introduces over-contrast and over-saturation artifacts at higher guidance strengths. We present EP-CFG (Energy-Preserving Classifier-Free Guidance), which addresses these issues by preserving the energy distribution of the conditional prediction during the guidance process. Our method simply rescales the energy of the guided output to match that of the conditional prediction at each denoising step, with an optional robust variant for improved artifact suppression. Through experiments, we show that EP-CFG maintains natural image quality and preserves details across guidance strengths while retaining CFG's semantic alignment benefits, all with minimal computational overhead.
Turbo3D: Ultra-fast Text-to-3D Generation
Dec 05, 2024



We present Turbo3D, an ultra-fast text-to-3D system capable of generating high-quality Gaussian splatting assets in under one second. Turbo3D employs a rapid 4-step, 4-view diffusion generator and an efficient feed-forward Gaussian reconstructor, both operating in latent space. The 4-step, 4-view generator is a student model distilled through a novel Dual-Teacher approach, which encourages the student to learn view consistency from a multi-view teacher and photo-realism from a single-view teacher. By shifting the Gaussian reconstructor's inputs from pixel space to latent space, we eliminate the extra image decoding time and halve the transformer sequence length for maximum efficiency. Our method demonstrates superior 3D generation results compared to previous baselines, while operating in a fraction of their runtime.
MaterialPicker: Multi-Modal Material Generation with Diffusion Transformers
Dec 04, 2024



High-quality material generation is key for virtual environment authoring and inverse rendering. We propose MaterialPicker, a multi-modal material generator leveraging a Diffusion Transformer (DiT) architecture, improving and simplifying the creation of high-quality materials from text prompts and/or photographs. Our method can generate a material based on an image crop of a material sample, even if the captured surface is distorted, viewed at an angle or partially occluded, as is often the case in photographs of natural scenes. We further allow the user to specify a text prompt to provide additional guidance for the generation. We finetune a pre-trained DiT-based video generator into a material generator, where each material map is treated as a frame in a video sequence. We evaluate our approach both quantitatively and qualitatively and show that it enables more diverse material generation and better distortion correction than previous work.
RandAR: Decoder-only Autoregressive Visual Generation in Random Orders
Dec 02, 2024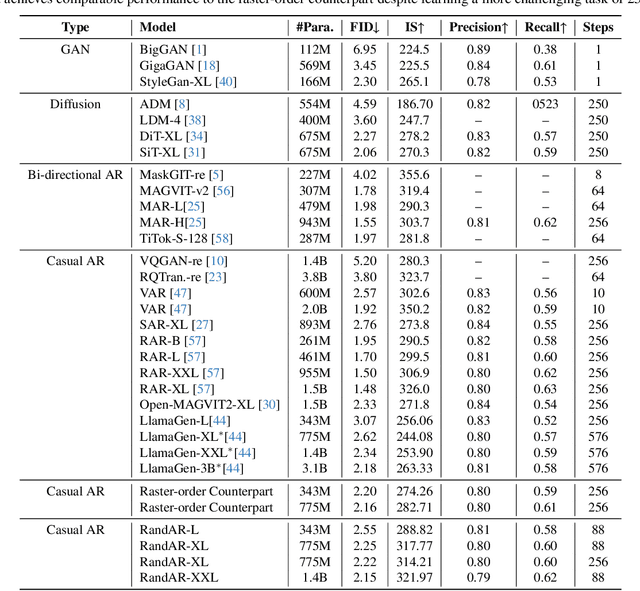
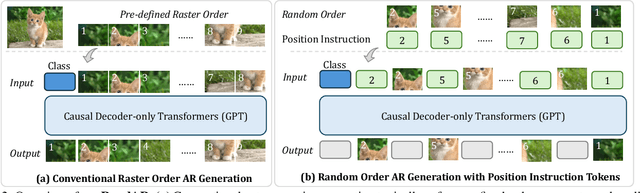
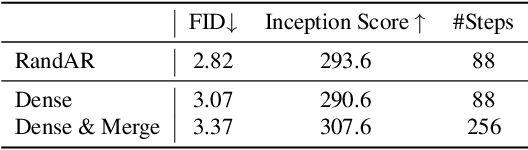
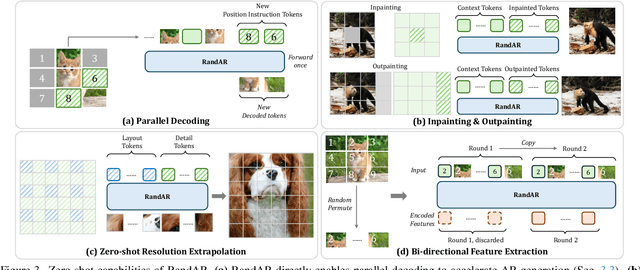
We introduce RandAR, a decoder-only visual autoregressive (AR) model capable of generating images in arbitrary token orders. Unlike previous decoder-only AR models that rely on a predefined generation order, RandAR removes this inductive bias, unlocking new capabilities in decoder-only generation. Our essential design enables random order by inserting a "position instruction token" before each image token to be predicted, representing the spatial location of the next image token. Trained on randomly permuted token sequences -- a more challenging task than fixed-order generation, RandAR achieves comparable performance to its conventional raster-order counterpart. More importantly, decoder-only transformers trained from random orders acquire new capabilities. For the efficiency bottleneck of AR models, RandAR adopts parallel decoding with KV-Cache at inference time, enjoying 2.5x acceleration without sacrificing generation quality. Additionally, RandAR supports inpainting, outpainting and resolution extrapolation in a zero-shot manner. We hope RandAR inspires new directions for decoder-only visual generation models and broadens their applications across diverse scenarios. Our project page is at https://rand-ar.github.io/.