 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Multi-Domain Adaptation of Language Models using Modular Experts
Oct 14, 2024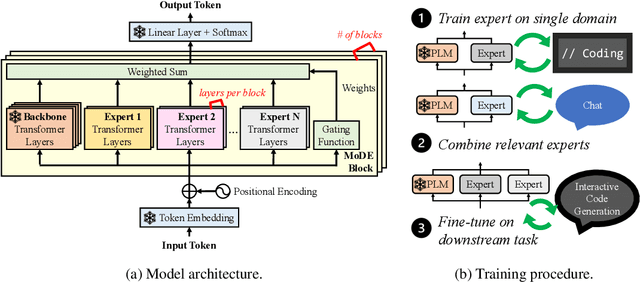
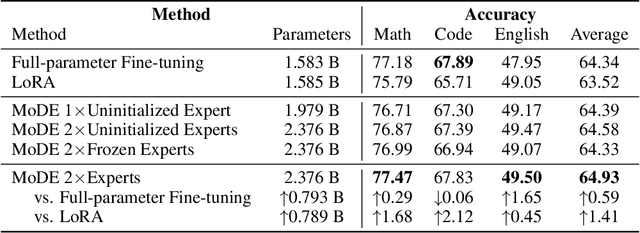
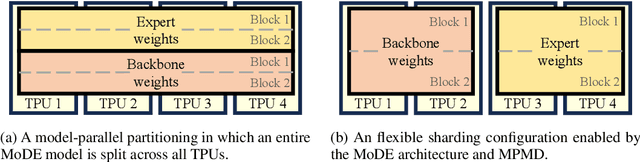
Domain-specific adaptation is critical to maximizing the performance of pre-trained language models (PLMs) on one or multiple targeted tasks, especially under resource-constrained use cases, such as edge devices. However, existing methods often struggle to balance domain-specific performance, retention of general knowledge, and efficiency for training and inference. To address these challenges, we propose Modular Domain Experts (MoDE). MoDE is a mixture-of-experts architecture that augments a general PLMs with modular, domain-specialized experts. These experts are trained independently and composed together via a lightweight training process. In contrast to standard low-rank adaptation methods, each MoDE expert consists of several transformer layers which scale better with more training examples and larger parameter counts. Our evaluation demonstrates that MoDE achieves comparable target performances to full parameter fine-tuning while achieving 1.65% better retention performance. Moreover, MoDE's architecture enables flexible sharding configurations and improves training speeds by up to 38% over state-of-the-art distributed training configurations.
GiPH: Generalizable Placement Learning for Adaptive Heterogeneous Computing
May 23, 2023Careful placement of a computational application within a target device cluster is critical for achieving low application completion time. The problem is challenging due to its NP-hardness and combinatorial nature. In recent years, learning-based approaches have been proposed to learn a placement policy that can be applied to unseen applications, motivated by the problem of placing a neural network across cloud servers. These approaches, however, generally assume the device cluster is fixed, which is not the case in mobile or edge computing settings, where heterogeneous devices move in and out of range for a particular application. We propose a new learning approach called GiPH, which learns policies that generalize to dynamic device clusters via 1) a novel graph representation gpNet that efficiently encodes the information needed for choosing a good placement, and 2) a scalable graph neural network (GNN) that learns a summary of the gpNet information. GiPH turns the placement problem into that of finding a sequence of placement improvements, learning a policy for selecting this sequence that scales to problems of arbitrary size. We evaluate GiPH with a wide range of task graphs and device clusters and show that our learned policy rapidly find good placements for new problem instances. GiPH finds placements with up to 30.5% lower completion times, searching up to 3X faster than other search-based placement policies.
Lifelong Language Pretraining with Distribution-Specialized Experts
May 20, 2023
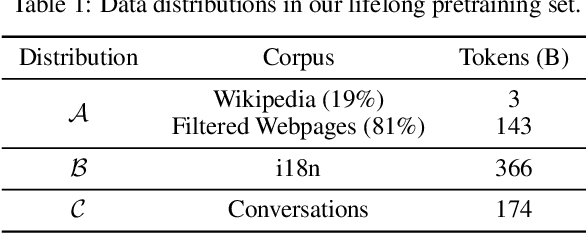

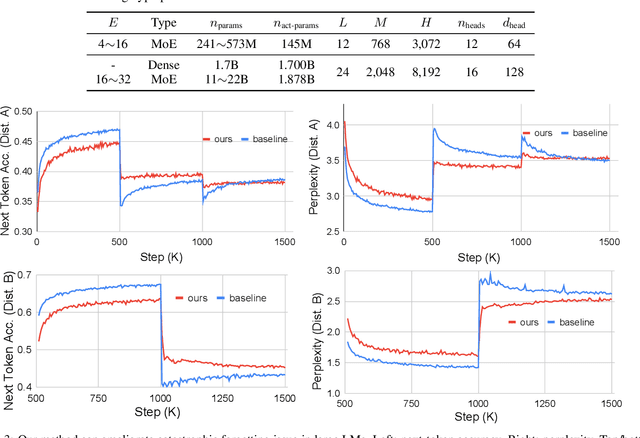
Pretraining on a large-scale corpus has become a standard method to build general language models (LMs). Adapting a model to new data distributions targeting different downstream tasks poses significant challenges. Naive fine-tuning may incur catastrophic forgetting when the over-parameterized LMs overfit the new data but fail to preserve the pretrained features. Lifelong learning (LLL) aims to enable information systems to learn from a continuous data stream across time. However, most prior work modifies the training recipe assuming a static fixed network architecture. We find that additional model capacity and proper regularization are key elements to achieving strong LLL performance. Thus, we propose Lifelong-MoE, an extensible MoE (Mixture-of-Experts) architecture that dynamically adds model capacity via adding experts with regularized pretraining. Our results show that by only introducing a limited number of extra experts while keeping the computation cost constant, our model can steadily adapt to data distribution shifts while preserving the previous knowledge. Compared to existing lifelong learning approaches, Lifelong-MoE achieves better few-shot performance on 19 downstream NLP tasks.
Mixture-of-Experts with Expert Choice Routing
Feb 18, 2022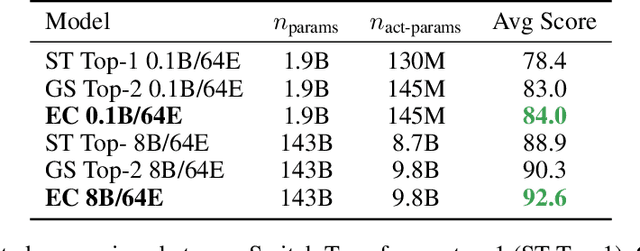
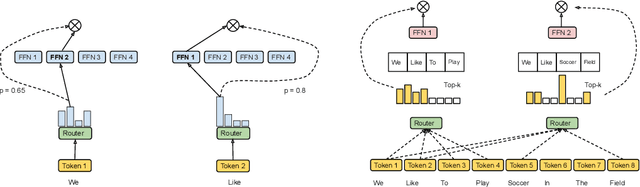

Sparsely-activated Mixture-of-experts (MoE) models allow the number of parameters to greatly increase while keeping the amount of computation for a given token or a given sample unchanged. However, a poor expert routing strategy (e.g. one resulting in load imbalance) can cause certain experts to be under-trained, leading to an expert being under or over-specialized. Prior work allocates a fixed number of experts to each token using a top-k function regardless of the relative importance of different tokens. To address this, we propose a heterogeneous mixture-of-experts employing an expert choice method. Instead of letting tokens select the top-k experts, we have experts selecting the top-k tokens. As a result, each token can be routed to a variable number of experts and each expert can have a fixed bucket size. We systematically study pre-training speedups using the same computational resources of the Switch Transformer top-1 and GShard top-2 gating of prior work and find that our method improves training convergence time by more than 2x. For the same computational cost, our method demonstrates higher performance in fine-tuning 11 selected tasks in the GLUE and SuperGLUE benchmarks. For a smaller activation cost, our method outperforms the T5 dense model in 7 out of the 11 tasks.
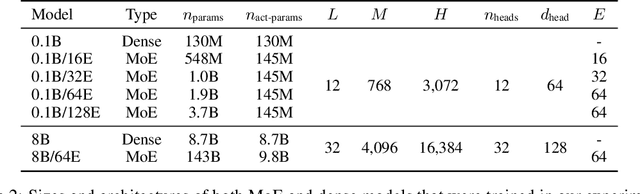
A Transferable Approach for Partitioning Machine Learning Models on Multi-Chip-Modules
Dec 07, 2021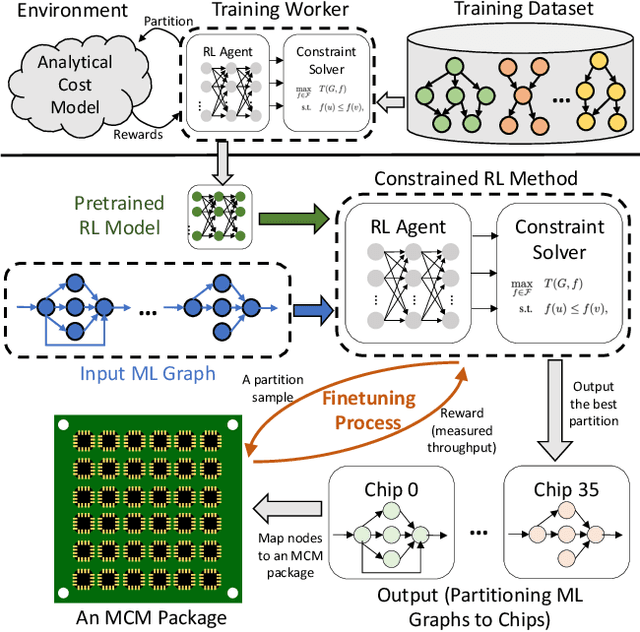
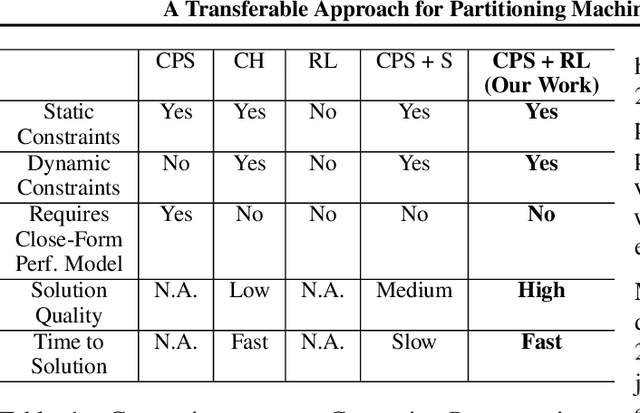
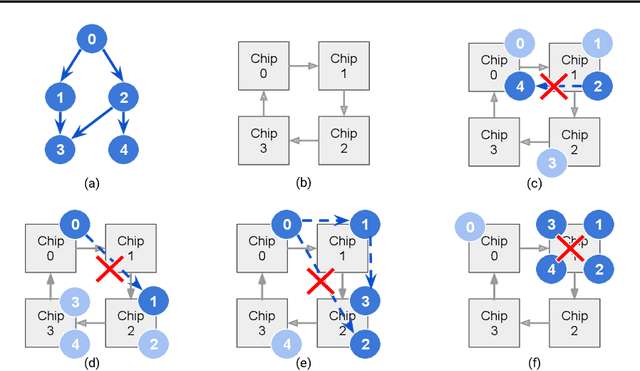
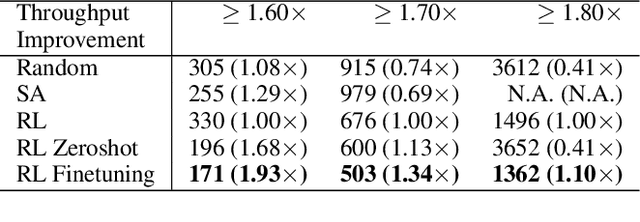
Multi-Chip-Modules (MCMs) reduce the design and fabrication cost of machine learning (ML) accelerators while delivering performance and energy efficiency on par with a monolithic large chip. However, ML compilers targeting MCMs need to solve complex optimization problems optimally and efficiently to achieve this high performance. One such problem is the multi-chip partitioning problem where compilers determine the optimal partitioning and placement of operations in tensor computation graphs on chiplets in MCMs. Partitioning ML graphs for MCMs is particularly hard as the search space grows exponentially with the number of chiplets available and the number of nodes in the neural network. Furthermore, the constraints imposed by the underlying hardware produce a search space where valid solutions are extremely sparse. In this paper, we present a strategy using a deep reinforcement learning (RL) framework to emit a possibly invalid candidate partition that is then corrected by a constraint solver. Using the constraint solver ensures that RL encounters valid solutions in the sparse space frequently enough to converge with fewer samples as compared to non-learned strategies. The architectural choices we make for the policy network allow us to generalize across different ML graphs. Our evaluation of a production-scale model, BERT, on real hardware reveals that the partitioning generated using RL policy achieves 6.11% and 5.85% higher throughput than random search and simulated annealing. In addition, fine-tuning the pre-trained RL policy reduces the search time from 3 hours to only 9 minutes, while achieving the same throughput as training RL policy from scratch.
An Evaluation of Edge TPU Accelerators for Convolutional Neural Networks
Feb 20, 2021


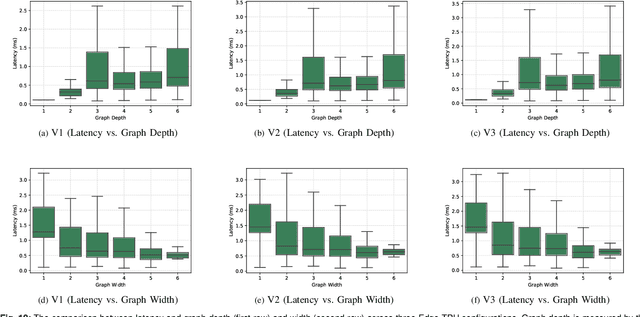
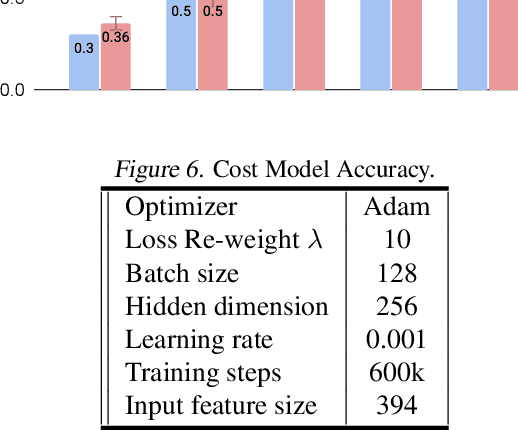
Edge TPUs are a domain of accelerators for low-power, edge devices and are widely used in various Google products such as Coral and Pixel devices. In this paper, we first discuss the major microarchitectural details of Edge TPUs. Then, we extensively evaluate three classes of Edge TPUs, covering different computing ecosystems, that are either currently deployed in Google products or are the product pipeline, across 423K unique convolutional neural networks. Building upon this extensive study, we discuss critical and interpretable microarchitectural insights about the studied classes of Edge TPUs. Mainly, we discuss how Edge TPU accelerators perform across convolutional neural networks with different structures. Finally, we present our ongoing efforts in developing high-accuracy learned machine learning models to estimate the major performance metrics of accelerators such as latency and energy consumption. These learned models enable significantly faster (in the order of milliseconds) evaluations of accelerators as an alternative to time-consuming cycle-accurate simulators and establish an exciting opportunity for rapid hard-ware/software co-design.
Rethinking Co-design of Neural Architectures and Hardware Accelerators
Feb 17, 2021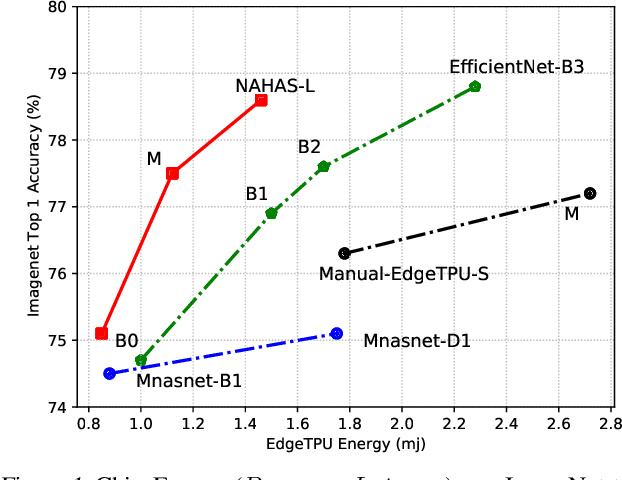
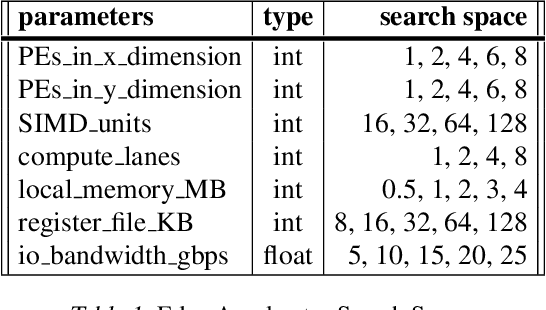
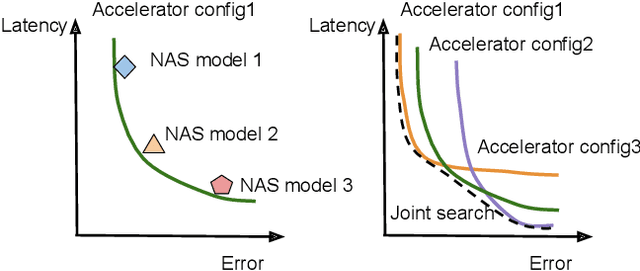
Neural architectures and hardware accelerators have been two driving forces for the progress in deep learning. Previous works typically attempt to optimize hardware given a fixed model architecture or model architecture given fixed hardware. And the dominant hardware architecture explored in this prior work is FPGAs. In our work, we target the optimization of hardware and software configurations on an industry-standard edge accelerator. We systematically study the importance and strategies of co-designing neural architectures and hardware accelerators. We make three observations: 1) the software search space has to be customized to fully leverage the targeted hardware architecture, 2) the search for the model architecture and hardware architecture should be done jointly to achieve the best of both worlds, and 3) different use cases lead to very different search outcomes. Our experiments show that the joint search method consistently outperforms previous platform-aware neural architecture search, manually crafted models, and the state-of-the-art EfficientNet on all latency targets by around 1% on ImageNet top-1 accuracy. Our method can reduce energy consumption of an edge accelerator by up to 2x under the same accuracy constraint, when co-adapting the model architecture and hardware accelerator configurations.
Apollo: Transferable Architecture Exploration
Feb 02, 2021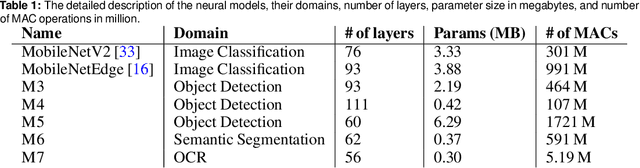
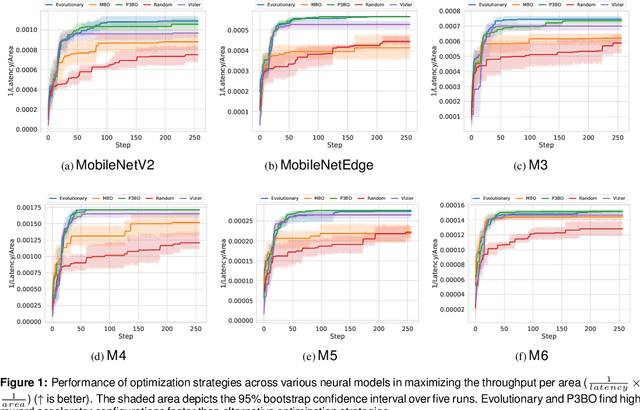
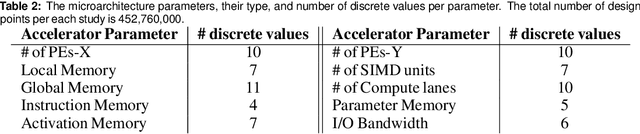
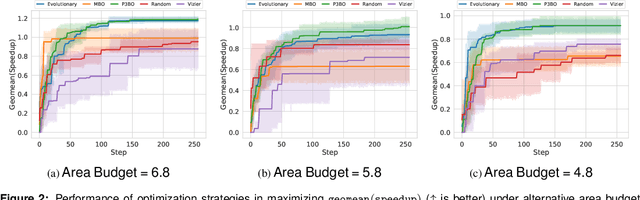
The looming end of Moore's Law and ascending use of deep learning drives the design of custom accelerators that are optimized for specific neural architectures. Architecture exploration for such accelerators forms a challenging constrained optimization problem over a complex, high-dimensional, and structured input space with a costly to evaluate objective function. Existing approaches for accelerator design are sample-inefficient and do not transfer knowledge between related optimizations tasks with different design constraints, such as area and/or latency budget, or neural architecture configurations. In this work, we propose a transferable architecture exploration framework, dubbed Apollo, that leverages recent advances in black-box function optimization for sample-efficient accelerator design. We use this framework to optimize accelerator configurations of a diverse set of neural architectures with alternative design constraints. We show that our framework finds high reward design configurations (up to 24.6% speedup) more sample-efficiently than a baseline black-box optimization approach. We further show that by transferring knowledge between target architectures with different design constraints, Apollo is able to find optimal configurations faster and often with better objective value (up to 25% improvements). This encouraging outcome portrays a promising path forward to facilitate generating higher quality accelerators.
Transferable Graph Optimizers for ML Compilers
Oct 21, 2020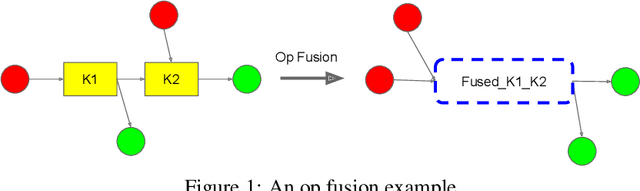
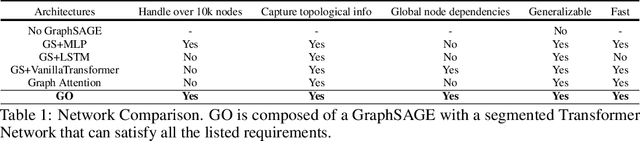
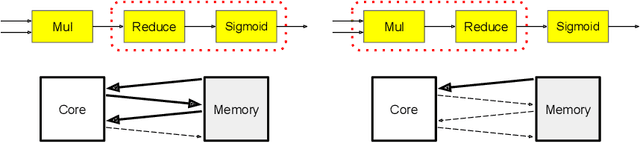
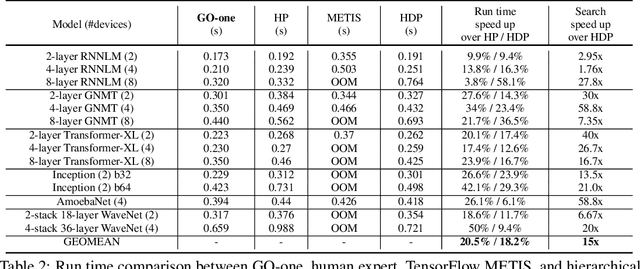
Most compilers for machine learning (ML) frameworks need to solve many correlated optimization problems to generate efficient machine code. Current ML compilers rely on heuristics based algorithms to solve these optimization problems one at a time. However, this approach is not only hard to maintain but often leads to sub-optimal solutions especially for newer model architectures. Existing learning based approaches in the literature are sample inefficient, tackle a single optimization problem, and do not generalize to unseen graphs making them infeasible to be deployed in practice. To address these limitations, we propose an end-to-end, transferable deep reinforcement learning method for computational graph optimization (GO), based on a scalable sequential attention mechanism over an inductive graph neural network. GO generates decisions on the entire graph rather than on each individual node autoregressively, drastically speeding up the search compared to prior methods. Moreover, we propose recurrent attention layers to jointly optimize dependent graph optimization tasks and demonstrate 33%-60% speedup on three graph optimization tasks compared to TensorFlow default optimization. On a diverse set of representative graphs consisting of up to 80,000 nodes, including Inception-v3, Transformer-XL, and WaveNet, GO achieves on average 21% improvement over human experts and 18% improvement over the prior state of the art with 15x faster convergence, on a device placement task evaluated in real systems.
* arXiv admin note: text overlap with arXiv:1910.01578
Chip Placement with Deep Reinforcement Learning
Apr 22, 2020
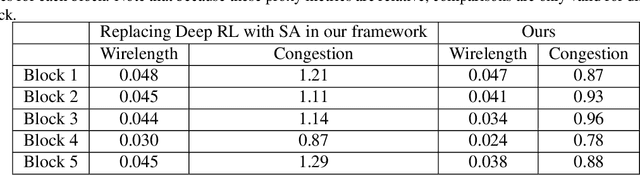
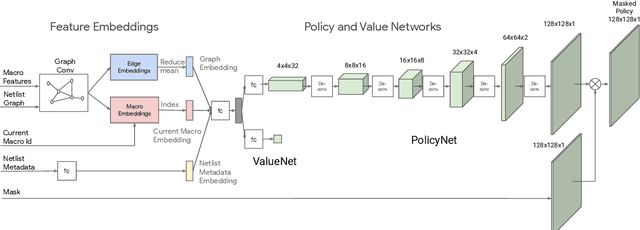
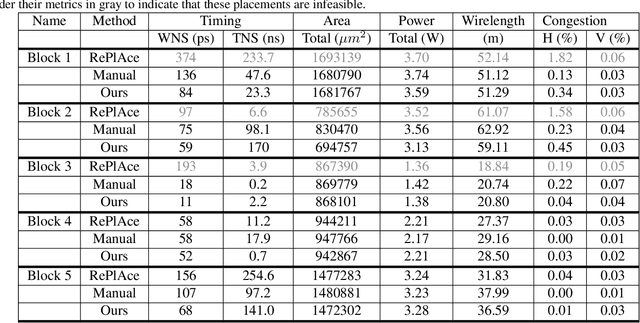
In this work, we present a learning-based approach to chip placement, one of the most complex and time-consuming stages of the chip design process. Unlike prior methods, our approach has the ability to learn from past experience and improve over time. In particular, as we train over a greater number of chip blocks, our method becomes better at rapidly generating optimized placements for previously unseen chip blocks. To achieve these results, we pose placement as a Reinforcement Learning (RL) problem and train an agent to place the nodes of a chip netlist onto a chip canvas. To enable our RL policy to generalize to unseen blocks, we ground representation learning in the supervised task of predicting placement quality. By designing a neural architecture that can accurately predict reward across a wide variety of netlists and their placements, we are able to generate rich feature embeddings of the input netlists. We then use this architecture as the encoder of our policy and value networks to enable transfer learning. Our objective is to minimize PPA (power, performance, and area), and we show that, in under 6 hours, our method can generate placements that are superhuman or comparable on modern accelerator netlists, whereas existing baselines require human experts in the loop and take several weeks.