 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAya Vision: Advancing the Frontier of Multilingual Multimodality
May 13, 2025Building multimodal language models is fundamentally challenging: it requires aligning vision and language modalities, curating high-quality instruction data, and avoiding the degradation of existing text-only capabilities once vision is introduced. These difficulties are further magnified in the multilingual setting, where the need for multimodal data in different languages exacerbates existing data scarcity, machine translation often distorts meaning, and catastrophic forgetting is more pronounced. To address the aforementioned challenges, we introduce novel techniques spanning both data and modeling. First, we develop a synthetic annotation framework that curates high-quality, diverse multilingual multimodal instruction data, enabling Aya Vision models to produce natural, human-preferred responses to multimodal inputs across many languages. Complementing this, we propose a cross-modal model merging technique that mitigates catastrophic forgetting, effectively preserving text-only capabilities while simultaneously enhancing multimodal generative performance. Aya-Vision-8B achieves best-in-class performance compared to strong multimodal models such as Qwen-2.5-VL-7B, Pixtral-12B, and even much larger Llama-3.2-90B-Vision. We further scale this approach with Aya-Vision-32B, which outperforms models more than twice its size, such as Molmo-72B and LLaMA-3.2-90B-Vision. Our work advances multilingual progress on the multi-modal frontier, and provides insights into techniques that effectively bend the need for compute while delivering extremely high performance.
Command A: An Enterprise-Ready Large Language Model
Apr 01, 2025



In this report we describe the development of Command A, a powerful large language model purpose-built to excel at real-world enterprise use cases. Command A is an agent-optimised and multilingual-capable model, with support for 23 languages of global business, and a novel hybrid architecture balancing efficiency with top of the range performance. It offers best-in-class Retrieval Augmented Generation (RAG) capabilities with grounding and tool use to automate sophisticated business processes. These abilities are achieved through a decentralised training approach, including self-refinement algorithms and model merging techniques. We also include results for Command R7B which shares capability and architectural similarities to Command A. Weights for both models have been released for research purposes. This technical report details our original training pipeline and presents an extensive evaluation of our models across a suite of enterprise-relevant tasks and public benchmarks, demonstrating excellent performance and efficiency.
Aya Expanse: Combining Research Breakthroughs for a New Multilingual Frontier
Dec 05, 2024



We introduce the Aya Expanse model family, a new generation of 8B and 32B parameter multilingual language models, aiming to address the critical challenge of developing highly performant multilingual models that match or surpass the capabilities of monolingual models. By leveraging several years of research at Cohere For AI and Cohere, including advancements in data arbitrage, multilingual preference training, and model merging, Aya Expanse sets a new state-of-the-art in multilingual performance. Our evaluations on the Arena-Hard-Auto dataset, translated into 23 languages, demonstrate that Aya Expanse 8B and 32B outperform leading open-weight models in their respective parameter classes, including Gemma 2, Qwen 2.5, and Llama 3.1, achieving up to a 76.6% win-rate. Notably, Aya Expanse 32B outperforms Llama 3.1 70B, a model with twice as many parameters, achieving a 54.0% win-rate. In this short technical report, we present extended evaluation results for the Aya Expanse model family and release their open-weights, together with a new multilingual evaluation dataset m-ArenaHard.
$α$NAS: Neural Architecture Search using Property Guided Synthesis
May 08, 2022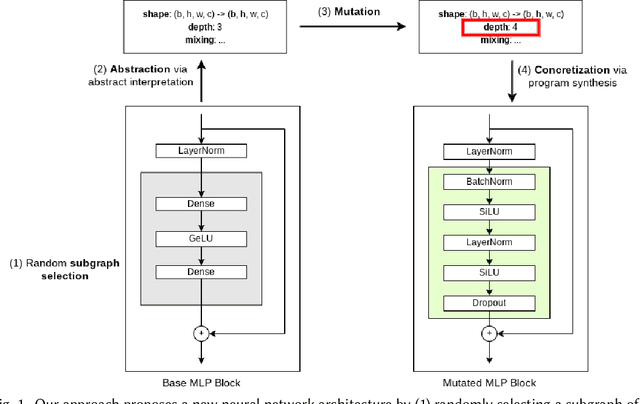
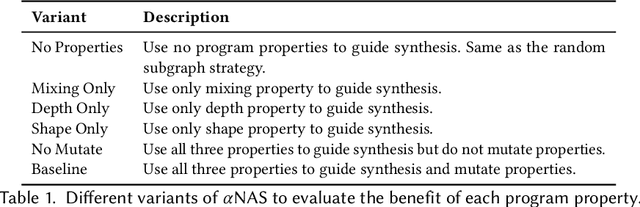
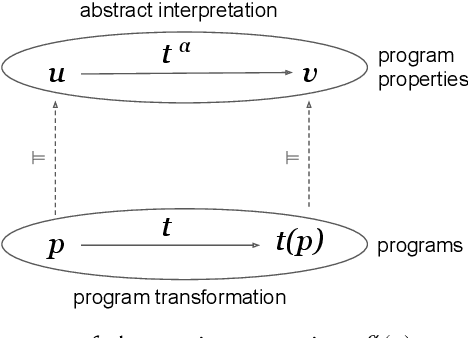
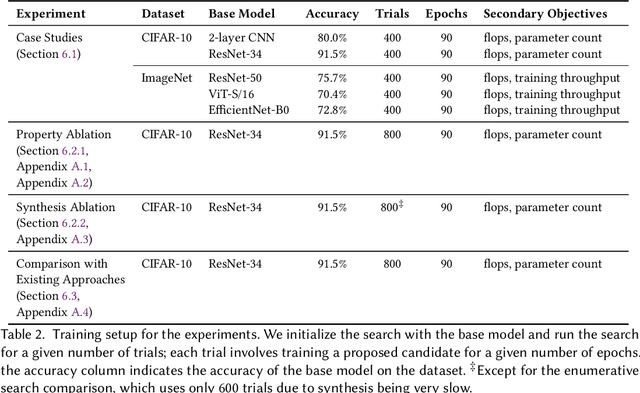
In the past few years, neural architecture search (NAS) has become an increasingly important tool within the deep learning community. Despite the many recent successes of NAS, current approaches still fall far short of the dream of automating an entire neural network architecture design from scratch. Most existing approaches require highly structured design spaces formulated manually by domain experts. In this work, we develop techniques that enable efficient NAS in a significantly larger design space. To accomplish this, we propose to perform NAS in an abstract search space of program properties. Our key insights are as follows: (1) the abstract search space is significantly smaller than the original search space, and (2) architectures with similar program properties also have similar performance; thus, we can search more efficiently in the abstract search space. To enable this approach, we also propose an efficient synthesis procedure, which accepts a set of promising program properties, and returns a satisfying neural architecture. We implement our approach, $\alpha$NAS, within an evolutionary framework, where the mutations are guided by the program properties. Starting with a ResNet-34 model, $\alpha$NAS produces a model with slightly improved accuracy on CIFAR-10 but 96% fewer parameters. On ImageNet, $\alpha$NAS is able to improve over Vision Transformer (30% fewer FLOPS and parameters), ResNet-50 (23% fewer FLOPS, 14% fewer parameters), and EfficientNet (7% fewer FLOPS and parameters) without any degradation in accuracy.
Pathways: Asynchronous Distributed Dataflow for ML
Mar 23, 2022

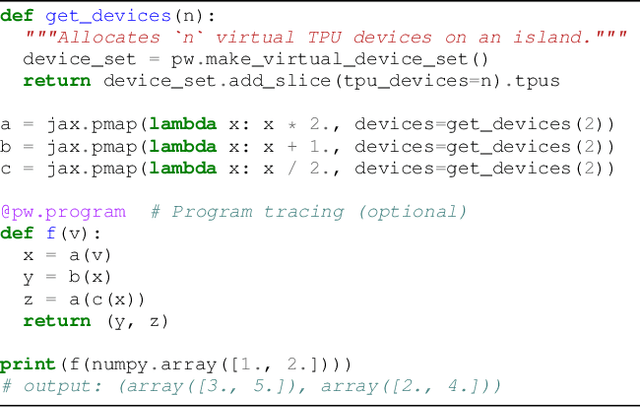

We present the design of a new large scale orchestration layer for accelerators. Our system, Pathways, is explicitly designed to enable exploration of new systems and ML research ideas, while retaining state of the art performance for current models. Pathways uses a sharded dataflow graph of asynchronous operators that consume and produce futures, and efficiently gang-schedules heterogeneous parallel computations on thousands of accelerators while coordinating data transfers over their dedicated interconnects. Pathways makes use of a novel asynchronous distributed dataflow design that lets the control plane execute in parallel despite dependencies in the data plane. This design, with careful engineering, allows Pathways to adopt a single-controller model that makes it easier to express complex new parallelism patterns. We demonstrate that Pathways can achieve performance parity (~100% accelerator utilization) with state-of-the-art systems when running SPMD computations over 2048 TPUs, while also delivering throughput comparable to the SPMD case for Transformer models that are pipelined across 16 stages, or sharded across two islands of accelerators connected over a data center network.
A Transferable Approach for Partitioning Machine Learning Models on Multi-Chip-Modules
Dec 07, 2021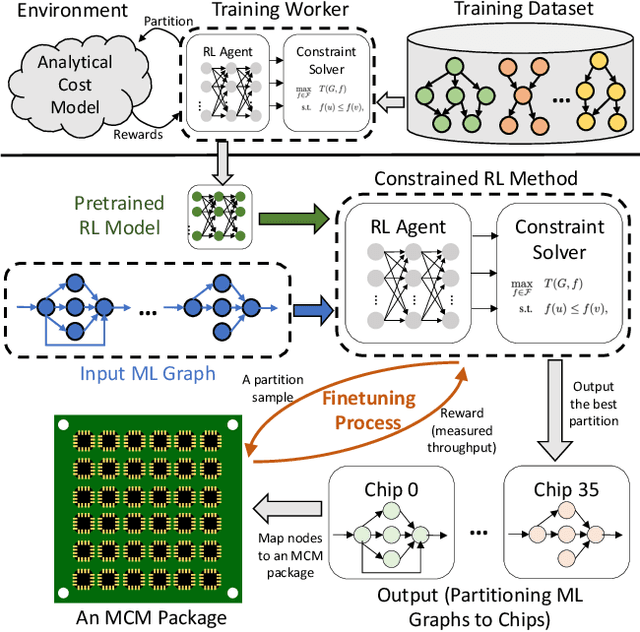
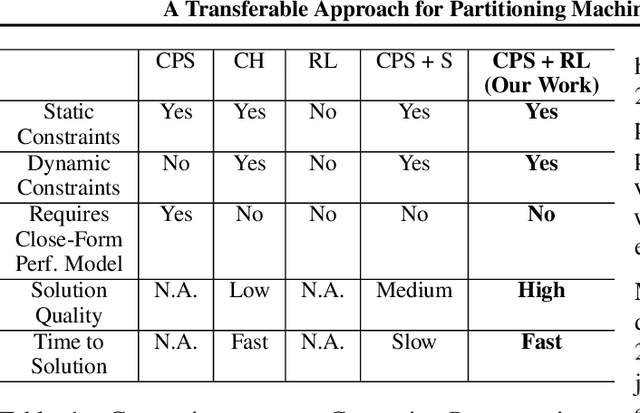
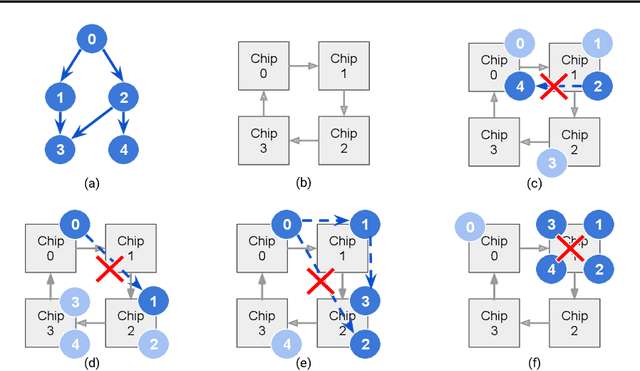
Multi-Chip-Modules (MCMs) reduce the design and fabrication cost of machine learning (ML) accelerators while delivering performance and energy efficiency on par with a monolithic large chip. However, ML compilers targeting MCMs need to solve complex optimization problems optimally and efficiently to achieve this high performance. One such problem is the multi-chip partitioning problem where compilers determine the optimal partitioning and placement of operations in tensor computation graphs on chiplets in MCMs. Partitioning ML graphs for MCMs is particularly hard as the search space grows exponentially with the number of chiplets available and the number of nodes in the neural network. Furthermore, the constraints imposed by the underlying hardware produce a search space where valid solutions are extremely sparse. In this paper, we present a strategy using a deep reinforcement learning (RL) framework to emit a possibly invalid candidate partition that is then corrected by a constraint solver. Using the constraint solver ensures that RL encounters valid solutions in the sparse space frequently enough to converge with fewer samples as compared to non-learned strategies. The architectural choices we make for the policy network allow us to generalize across different ML graphs. Our evaluation of a production-scale model, BERT, on real hardware reveals that the partitioning generated using RL policy achieves 6.11% and 5.85% higher throughput than random search and simulated annealing. In addition, fine-tuning the pre-trained RL policy reduces the search time from 3 hours to only 9 minutes, while achieving the same throughput as training RL policy from scratch.
Equality Saturation for Tensor Graph Superoptimization
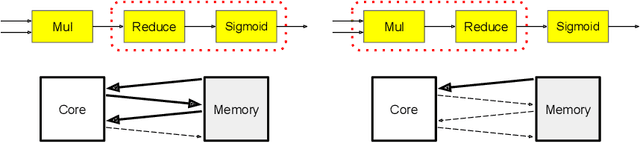
Jan 05, 2021One of the major optimizations employed in deep learning frameworks is graph rewriting. Production frameworks rely on heuristics to decide if rewrite rules should be applied and in which order. Prior research has shown that one can discover more optimal tensor computation graphs if we search for a better sequence of substitutions instead of relying on heuristics. However, we observe that existing approaches for tensor graph superoptimization both in production and research frameworks apply substitutions in a sequential manner. Such sequential search methods are sensitive to the order in which the substitutions are applied and often only explore a small fragment of the exponential space of equivalent graphs. This paper presents a novel technique for tensor graph superoptimization that employs equality saturation to apply all possible substitutions at once. We show that our approach can find optimized graphs with up to 16% speedup over state-of-the-art, while spending on average 48x less time optimizing.
Transferable Graph Optimizers for ML Compilers
Oct 21, 2020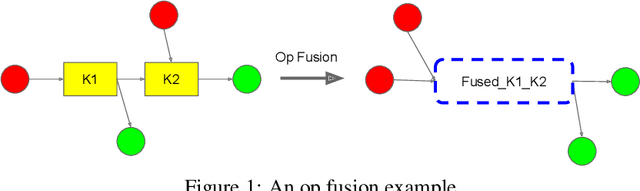
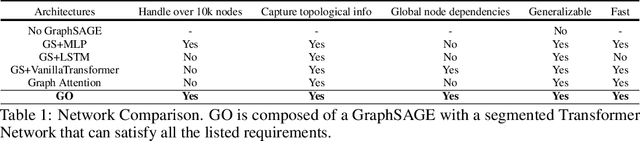
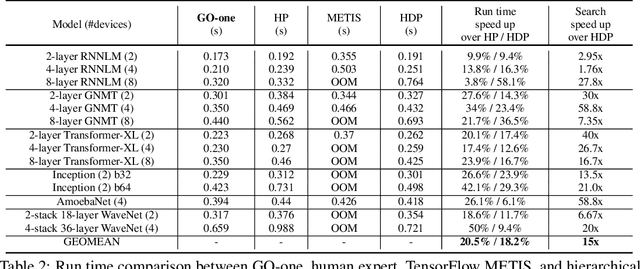
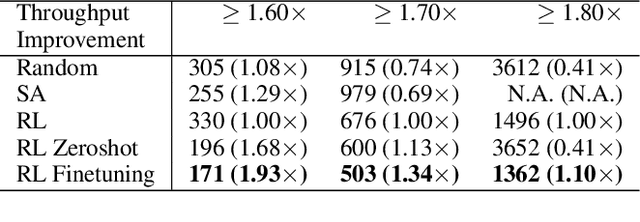
Most compilers for machine learning (ML) frameworks need to solve many correlated optimization problems to generate efficient machine code. Current ML compilers rely on heuristics based algorithms to solve these optimization problems one at a time. However, this approach is not only hard to maintain but often leads to sub-optimal solutions especially for newer model architectures. Existing learning based approaches in the literature are sample inefficient, tackle a single optimization problem, and do not generalize to unseen graphs making them infeasible to be deployed in practice. To address these limitations, we propose an end-to-end, transferable deep reinforcement learning method for computational graph optimization (GO), based on a scalable sequential attention mechanism over an inductive graph neural network. GO generates decisions on the entire graph rather than on each individual node autoregressively, drastically speeding up the search compared to prior methods. Moreover, we propose recurrent attention layers to jointly optimize dependent graph optimization tasks and demonstrate 33%-60% speedup on three graph optimization tasks compared to TensorFlow default optimization. On a diverse set of representative graphs consisting of up to 80,000 nodes, including Inception-v3, Transformer-XL, and WaveNet, GO achieves on average 21% improvement over human experts and 18% improvement over the prior state of the art with 15x faster convergence, on a device placement task evaluated in real systems.
* arXiv admin note: text overlap with arXiv:1910.01578
GDP: Generalized Device Placement for Dataflow Graphs
Sep 28, 2019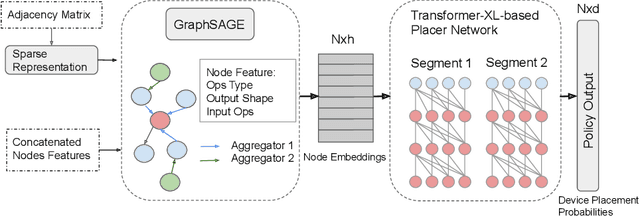
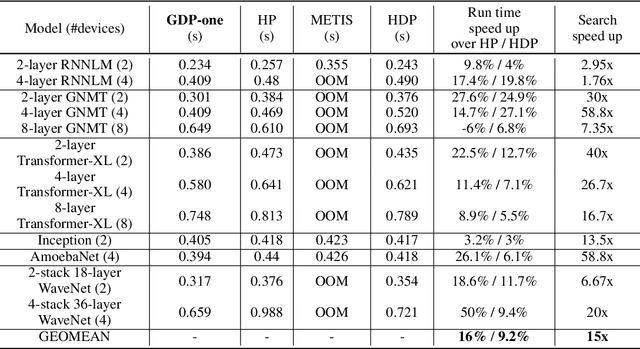
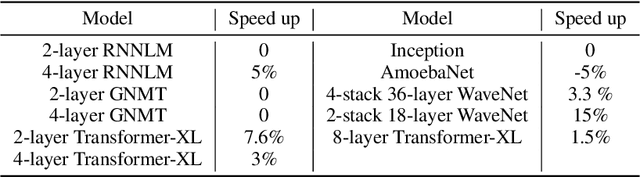
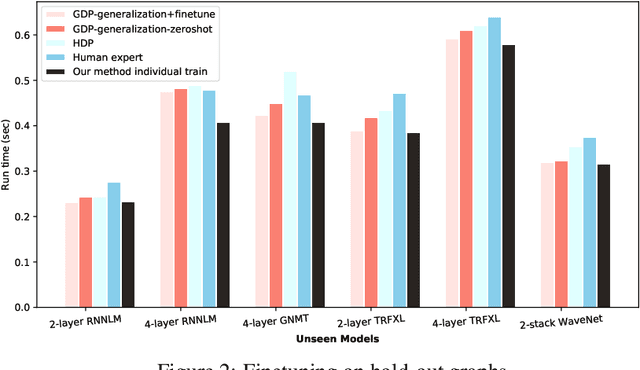
Runtime and scalability of large neural networks can be significantly affected by the placement of operations in their dataflow graphs on suitable devices. With increasingly complex neural network architectures and heterogeneous device characteristics, finding a reasonable placement is extremely challenging even for domain experts. Most existing automated device placement approaches are impractical due to the significant amount of compute required and their inability to generalize to new, previously held-out graphs. To address both limitations, we propose an efficient end-to-end method based on a scalable sequential attention mechanism over a graph neural network that is transferable to new graphs. On a diverse set of representative deep learning models, including Inception-v3, AmoebaNet, Transformer-XL, and WaveNet, our method on average achieves 16% improvement over human experts and 9.2% improvement over the prior art with 15 times faster convergence. To further reduce the computation cost, we pre-train the policy network on a set of dataflow graphs and use a superposition network to fine-tune it on each individual graph, achieving state-of-the-art performance on large hold-out graphs with over 50k nodes, such as an 8-layer GNMT.