 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Statistical Estimators with Bounded Empirical Sensitivity
May 21, 2026We introduce a new measure of robustness for statistical estimators, which we call \emph{empirical sensitivity}. An estimator $\hat θ$ has bounded empirical sensitivity if, with high probability over a dataset $X = (X_1, \dots, X_n) \sim \mathcal{D}^{\otimes n}$, for any dataset $Y$ obtained by modifying at most $ηn$ points in $X$, we have that $\hat θ(Y)$ is close to $\hat θ(X)$. We study bounds on this quantity for the prototypical problem of Gaussian mean estimation. We prove new lower bounds, showing that for any estimator $\hat μ$ which achieves an optimal $\ell_2$-error bound of $O\left(\sqrt{d/n}\right)$, the empirical sensitivity is at least $Ω\left(η+ \sqrt{ηd/n}\right)$. The two terms arise due to obstructions on the mean and variance (via an Efron-Stein argument) of such an estimator. We show that this bound is tight up to logarithmic factors, by employing recent results for robust empirical mean estimation.
Differentially Private Modeling of Disease Transmission within Human Contact Networks
Apr 08, 2026Epidemiologic studies of infectious diseases often rely on models of contact networks to capture the complex interactions that govern disease spread, and ongoing projects aim to vastly increase the scale at which such data can be collected. However, contact networks may include sensitive information, such as sexual relationships or drug use behavior. Protecting individual privacy while maintaining the scientific usefulness of the data is crucial. We propose a privacy-preserving pipeline for disease spread simulation studies based on a sensitive network that integrates differential privacy (DP) with statistical network models such as stochastic block models (SBMs) and exponential random graph models (ERGMs). Our pipeline comprises three steps: (1) compute network summary statistics using \emph{node-level} DP (which corresponds to protecting individuals' contributions); (2) fit a statistical model, like an ERGM, using these summaries, which allows generating synthetic networks reflecting the structure of the original network; and (3) simulate disease spread on the synthetic networks using an agent-based model. We evaluate the effectiveness of our approach using a simple Susceptible-Infected-Susceptible (SIS) disease model under multiple configurations. We compare both numerical results, such as simulated disease incidence and prevalence, as well as qualitative conclusions such as intervention effect size, on networks generated with and without differential privacy constraints. Our experiments are based on egocentric sexual network data from the ARTNet study (a survey about HIV-related behaviors). Our results show that the noise added for privacy is small relative to other sources of error (sampling and model misspecification). This suggests that, in principle, curators of such sensitive data can provide valuable epidemiologic insights while protecting privacy.
Ensemble of Small Classifiers For Imbalanced White Blood Cell Classification
Mar 21, 2026Automating white blood cell classification for diagnosis of leukaemia is a promising alternative to time-consuming and resource-intensive examination of cells by expert pathologists. However, designing robust algorithms for classification of rare cell types remains challenging due to variations in staining, scanning and inter-patient heterogeneity. We propose a lightweight ensemble approach for classification of cells during Haematopoiesis, with a focus on the biology of Granulopoiesis, Monocytopoiesis and Lymphopoiesis. Through dataset expansion to alleviate some class imbalance, we demonstrate that a simple ensemble of lightweight pretrained SwinV2-Tiny, DinoBloom-Small and ConvNeXT-V2-Tiny models achieves excellent performance on this challenging dataset. We train 3 instantiations of each architecture in a stratified 3-fold cross-validation framework; for an input image, we forward-pass through all 9 models and aggregate through logit averaging. We further reason on the weaknesses of our model in confusing similar-looking myelocytes in granulopoiesis and lymphocytes in lymphopoiesis. Code: https://gitlab.com/siddharthsrivastava/wbc-bench-2026.
The Sample Complexity of Membership Inference and Privacy Auditing
Aug 26, 2025A membership-inference attack gets the output of a learning algorithm, and a target individual, and tries to determine whether this individual is a member of the training data or an independent sample from the same distribution. A successful membership-inference attack typically requires the attacker to have some knowledge about the distribution that the training data was sampled from, and this knowledge is often captured through a set of independent reference samples from that distribution. In this work we study how much information the attacker needs for membership inference by investigating the sample complexity-the minimum number of reference samples required-for a successful attack. We study this question in the fundamental setting of Gaussian mean estimation where the learning algorithm is given $n$ samples from a Gaussian distribution $\mathcal{N}(\mu,\Sigma)$ in $d$ dimensions, and tries to estimate $\hat\mu$ up to some error $\mathbb{E}[\|\hat \mu - \mu\|^2_{\Sigma}]\leq \rho^2 d$. Our result shows that for membership inference in this setting, $\Omega(n + n^2 \rho^2)$ samples can be necessary to carry out any attack that competes with a fully informed attacker. Our result is the first to show that the attacker sometimes needs many more samples than the training algorithm uses to train the model. This result has significant implications for practice, as all attacks used in practice have a restricted form that uses $O(n)$ samples and cannot benefit from $\omega(n)$ samples. Thus, these attacks may be underestimating the possibility of membership inference, and better attacks may be possible when information about the distribution is easy to obtain.
Generate-then-Verify: Reconstructing Data from Limited Published Statistics
Apr 29, 2025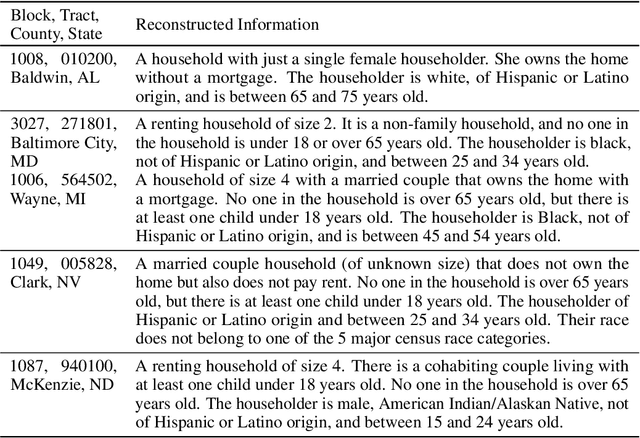
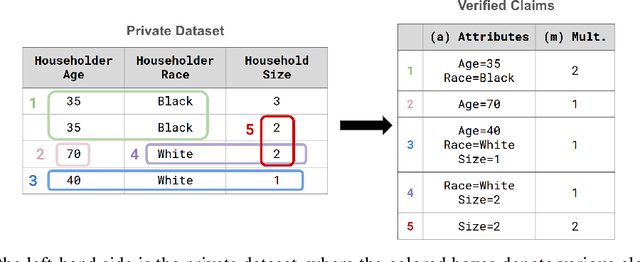
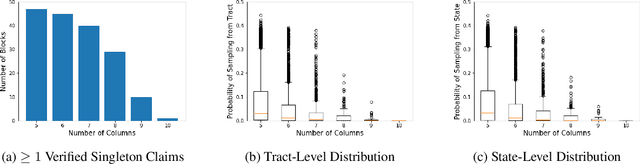
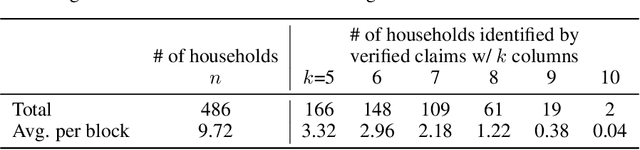
We study the problem of reconstructing tabular data from aggregate statistics, in which the attacker aims to identify interesting claims about the sensitive data that can be verified with 100% certainty given the aggregates. Successful attempts in prior work have conducted studies in settings where the set of published statistics is rich enough that entire datasets can be reconstructed with certainty. In our work, we instead focus on the regime where many possible datasets match the published statistics, making it impossible to reconstruct the entire private dataset perfectly (i.e., when approaches in prior work fail). We propose the problem of partial data reconstruction, in which the goal of the adversary is to instead output a $\textit{subset}$ of rows and/or columns that are $\textit{guaranteed to be correct}$. We introduce a novel integer programming approach that first $\textbf{generates}$ a set of claims and then $\textbf{verifies}$ whether each claim holds for all possible datasets consistent with the published aggregates. We evaluate our approach on the housing-level microdata from the U.S. Decennial Census release, demonstrating that privacy violations can still persist even when information published about such data is relatively sparse.
It's My Data Too: Private ML for Datasets with Multi-User Training Examples
Mar 05, 2025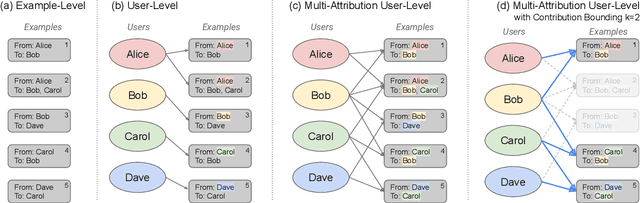

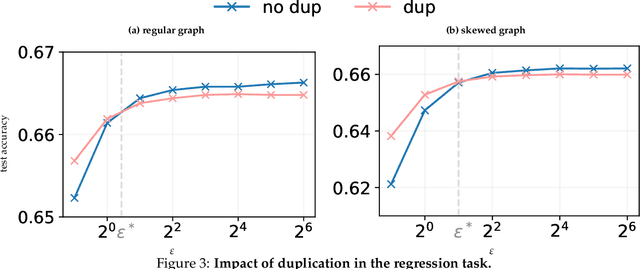
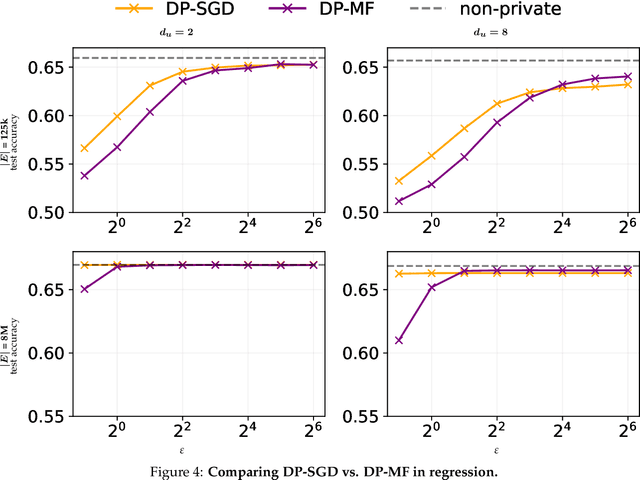
We initiate a study of algorithms for model training with user-level differential privacy (DP), where each example may be attributed to multiple users, which we call the multi-attribution model. We first provide a carefully chosen definition of user-level DP under the multi-attribution model. Training in the multi-attribution model is facilitated by solving the contribution bounding problem, i.e. the problem of selecting a subset of the dataset for which each user is associated with a limited number of examples. We propose a greedy baseline algorithm for the contribution bounding problem. We then empirically study this algorithm for a synthetic logistic regression task and a transformer training task, including studying variants of this baseline algorithm that optimize the subset chosen using different techniques and criteria. We find that the baseline algorithm remains competitive with its variants in most settings, and build a better understanding of the practical importance of a bias-variance tradeoff inherent in solutions to the contribution bounding problem.
Privacy in Metalearning and Multitask Learning: Modeling and Separations
Dec 16, 2024Model personalization allows a set of individuals, each facing a different learning task, to train models that are more accurate for each person than those they could develop individually. The goals of personalization are captured in a variety of formal frameworks, such as multitask learning and metalearning. Combining data for model personalization poses risks for privacy because the output of an individual's model can depend on the data of other individuals. In this work we undertake a systematic study of differentially private personalized learning. Our first main contribution is to construct a taxonomy of formal frameworks for private personalized learning. This taxonomy captures different formal frameworks for learning as well as different threat models for the attacker. Our second main contribution is to prove separations between the personalized learning problems corresponding to different choices. In particular, we prove a novel separation between private multitask learning and private metalearning.
The Last Iterate Advantage: Empirical Auditing and Principled Heuristic Analysis of Differentially Private SGD
Oct 10, 2024We propose a simple heuristic privacy analysis of noisy clipped stochastic gradient descent (DP-SGD) in the setting where only the last iterate is released and the intermediate iterates remain hidden. Namely, our heuristic assumes a linear structure for the model. We show experimentally that our heuristic is predictive of the outcome of privacy auditing applied to various training procedures. Thus it can be used prior to training as a rough estimate of the final privacy leakage. We also probe the limitations of our heuristic by providing some artificial counterexamples where it underestimates the privacy leakage. The standard composition-based privacy analysis of DP-SGD effectively assumes that the adversary has access to all intermediate iterates, which is often unrealistic. However, this analysis remains the state of the art in practice. While our heuristic does not replace a rigorous privacy analysis, it illustrates the large gap between the best theoretical upper bounds and the privacy auditing lower bounds and sets a target for further work to improve the theoretical privacy analyses. We also empirically support our heuristic and show existing privacy auditing attacks are bounded by our heuristic analysis in both vision and language tasks.
Auditing Privacy Mechanisms via Label Inference Attacks
Jun 04, 2024



We propose reconstruction advantage measures to audit label privatization mechanisms. A reconstruction advantage measure quantifies the increase in an attacker's ability to infer the true label of an unlabeled example when provided with a private version of the labels in a dataset (e.g., aggregate of labels from different users or noisy labels output by randomized response), compared to an attacker that only observes the feature vectors, but may have prior knowledge of the correlation between features and labels. We consider two such auditing measures: one additive, and one multiplicative. These incorporate previous approaches taken in the literature on empirical auditing and differential privacy. The measures allow us to place a variety of proposed privatization schemes -- some differentially private, some not -- on the same footing. We analyze these measures theoretically under a distributional model which encapsulates reasonable adversarial settings. We also quantify their behavior empirically on real and simulated prediction tasks. Across a range of experimental settings, we find that differentially private schemes dominate or match the privacy-utility tradeoff of more heuristic approaches.
Insufficient Statistics Perturbation: Stable Estimators for Private Least Squares
Apr 23, 2024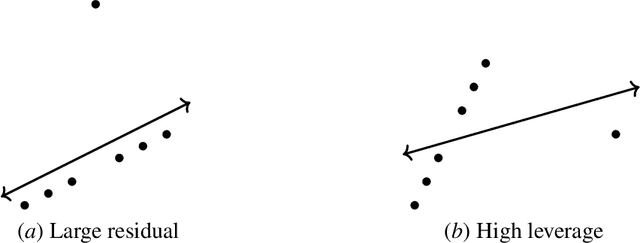
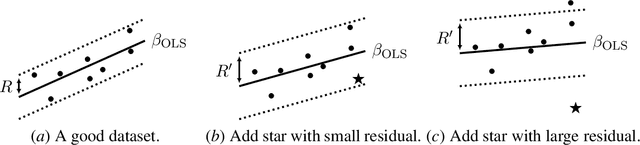
We present a sample- and time-efficient differentially private algorithm for ordinary least squares, with error that depends linearly on the dimension and is independent of the condition number of $X^\top X$, where $X$ is the design matrix. All prior private algorithms for this task require either $d^{3/2}$ examples, error growing polynomially with the condition number, or exponential time. Our near-optimal accuracy guarantee holds for any dataset with bounded statistical leverage and bounded residuals. Technically, we build on the approach of Brown et al. (2023) for private mean estimation, adding scaled noise to a carefully designed stable nonprivate estimator of the empirical regression vector.