 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSenseNova-U1: Unifying Multimodal Understanding and Generation with NEO-unify Architecture
May 12, 2026Recent large vision-language models (VLMs) remain fundamentally constrained by a persistent dichotomy: understanding and generation are treated as distinct problems, leading to fragmented architectures, cascaded pipelines, and misaligned representation spaces. We argue that this divide is not merely an engineering artifact, but a structural limitation that hinders the emergence of native multimodal intelligence. Hence, we introduce SenseNova-U1, a native unified multimodal paradigm built upon NEO-unify, in which understanding and generation evolve as synergistic views of a single underlying process. We launch two native unified variants, SenseNova-U1-8B-MoT and SenseNova-U1-A3B-MoT, built on dense (8B) and mixture-of-experts (30B-A3B) understanding baselines, respectively. Designed from first principles, they rival top-tier understanding-only VLMs across text understanding, vision-language perception, knowledge reasoning, agentic decision-making, and spatial intelligence. Meanwhile, they deliver strong semantic consistency and visual fidelity, excelling in conventional or knowledge-intensive any-to-image (X2I) synthesis, complex text-rich infographic generation, and interleaved vision-language generation, with or without think patterns. Beyond performance, we show detailed model design, data preprocessing, pre-/post-training, and inference strategies to support community research. Last but not least, preliminary evidence demonstrates that our models extend beyond perception and generation, performing strongly in vision-language-action (VLA) and world model (WM) scenarios. This points toward a broader roadmap where models do not translate between modalities, but think and act across them in a native manner. Multimodal AI is no longer about connecting separate systems, but about building a unified one and trusting the necessary capabilities to emerge from within.
EgoLife: Towards Egocentric Life Assistant
Mar 05, 2025We introduce EgoLife, a project to develop an egocentric life assistant that accompanies and enhances personal efficiency through AI-powered wearable glasses. To lay the foundation for this assistant, we conducted a comprehensive data collection study where six participants lived together for one week, continuously recording their daily activities - including discussions, shopping, cooking, socializing, and entertainment - using AI glasses for multimodal egocentric video capture, along with synchronized third-person-view video references. This effort resulted in the EgoLife Dataset, a comprehensive 300-hour egocentric, interpersonal, multiview, and multimodal daily life dataset with intensive annotation. Leveraging this dataset, we introduce EgoLifeQA, a suite of long-context, life-oriented question-answering tasks designed to provide meaningful assistance in daily life by addressing practical questions such as recalling past relevant events, monitoring health habits, and offering personalized recommendations. To address the key technical challenges of (1) developing robust visual-audio models for egocentric data, (2) enabling identity recognition, and (3) facilitating long-context question answering over extensive temporal information, we introduce EgoButler, an integrated system comprising EgoGPT and EgoRAG. EgoGPT is an omni-modal model trained on egocentric datasets, achieving state-of-the-art performance on egocentric video understanding. EgoRAG is a retrieval-based component that supports answering ultra-long-context questions. Our experimental studies verify their working mechanisms and reveal critical factors and bottlenecks, guiding future improvements. By releasing our datasets, models, and benchmarks, we aim to stimulate further research in egocentric AI assistants.
SOLAMI: Social Vision-Language-Action Modeling for Immersive Interaction with 3D Autonomous Characters
Nov 29, 2024Human beings are social animals. How to equip 3D autonomous characters with similar social intelligence that can perceive, understand and interact with humans remains an open yet foundamental problem. In this paper, we introduce SOLAMI, the first end-to-end Social vision-Language-Action (VLA) Modeling framework for Immersive interaction with 3D autonomous characters. Specifically, SOLAMI builds 3D autonomous characters from three aspects: (1) Social VLA Architecture: We propose a unified social VLA framework to generate multimodal response (speech and motion) based on the user's multimodal input to drive the character for social interaction. (2) Interactive Multimodal Data: We present SynMSI, a synthetic multimodal social interaction dataset generated by an automatic pipeline using only existing motion datasets to address the issue of data scarcity. (3) Immersive VR Interface: We develop a VR interface that enables users to immersively interact with these characters driven by various architectures. Extensive quantitative experiments and user studies demonstrate that our framework leads to more precise and natural character responses (in both speech and motion) that align with user expectations with lower latency.
Duolando: Follower GPT with Off-Policy Reinforcement Learning for Dance Accompaniment
Mar 27, 2024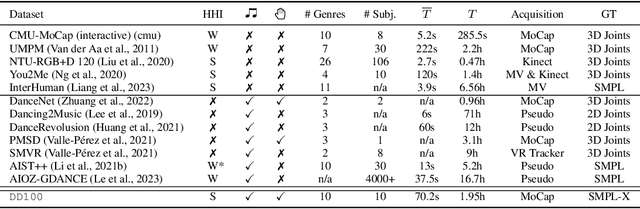
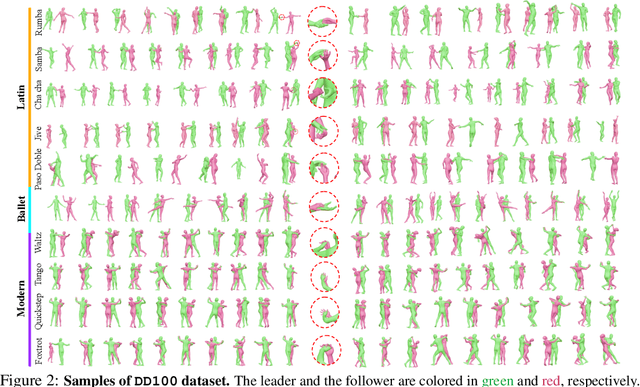
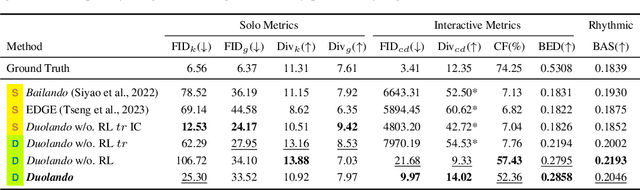
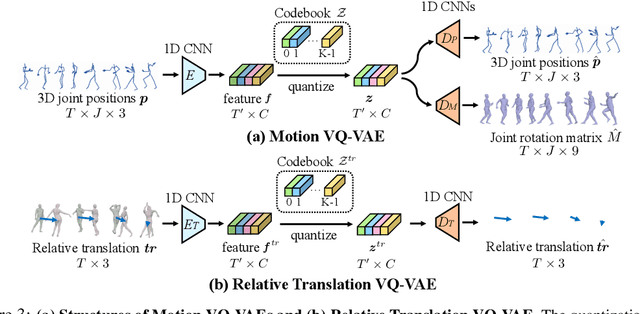
We introduce a novel task within the field of 3D dance generation, termed dance accompaniment, which necessitates the generation of responsive movements from a dance partner, the "follower", synchronized with the lead dancer's movements and the underlying musical rhythm. Unlike existing solo or group dance generation tasks, a duet dance scenario entails a heightened degree of interaction between the two participants, requiring delicate coordination in both pose and position. To support this task, we first build a large-scale and diverse duet interactive dance dataset, DD100, by recording about 117 minutes of professional dancers' performances. To address the challenges inherent in this task, we propose a GPT-based model, Duolando, which autoregressively predicts the subsequent tokenized motion conditioned on the coordinated information of the music, the leader's and the follower's movements. To further enhance the GPT's capabilities of generating stable results on unseen conditions (music and leader motions), we devise an off-policy reinforcement learning strategy that allows the model to explore viable trajectories from out-of-distribution samplings, guided by human-defined rewards. Based on the collected dataset and proposed method, we establish a benchmark with several carefully designed metrics.
Digital Life Project: Autonomous 3D Characters with Social Intelligence
Dec 07, 2023



In this work, we present Digital Life Project, a framework utilizing language as the universal medium to build autonomous 3D characters, who are capable of engaging in social interactions and expressing with articulated body motions, thereby simulating life in a digital environment. Our framework comprises two primary components: 1) SocioMind: a meticulously crafted digital brain that models personalities with systematic few-shot exemplars, incorporates a reflection process based on psychology principles, and emulates autonomy by initiating dialogue topics; 2) MoMat-MoGen: a text-driven motion synthesis paradigm for controlling the character's digital body. It integrates motion matching, a proven industry technique to ensure motion quality, with cutting-edge advancements in motion generation for diversity. Extensive experiments demonstrate that each module achieves state-of-the-art performance in its respective domain. Collectively, they enable virtual characters to initiate and sustain dialogues autonomously, while evolving their socio-psychological states. Concurrently, these characters can perform contextually relevant bodily movements. Additionally, a motion captioning module further allows the virtual character to recognize and appropriately respond to human players' actions. Homepage: https://digital-life-project.com/
DNA-Rendering: A Diverse Neural Actor Repository for High-Fidelity Human-centric Rendering
Jul 19, 2023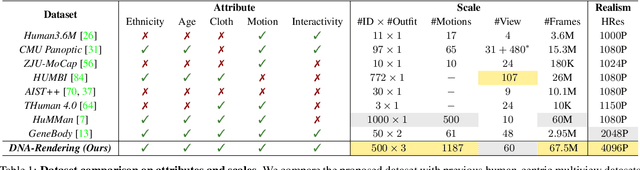

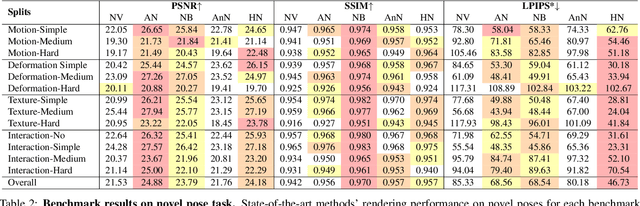
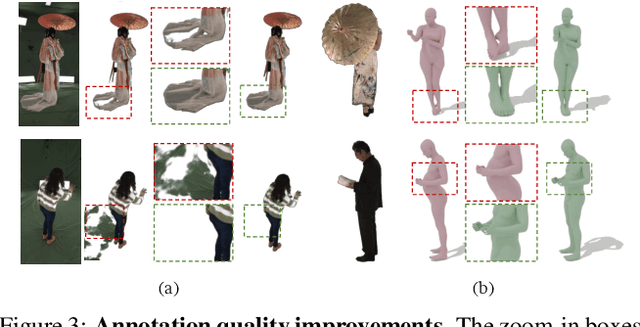
Realistic human-centric rendering plays a key role in both computer vision and computer graphics. Rapid progress has been made in the algorithm aspect over the years, yet existing human-centric rendering datasets and benchmarks are rather impoverished in terms of diversity, which are crucial for rendering effect. Researchers are usually constrained to explore and evaluate a small set of rendering problems on current datasets, while real-world applications require methods to be robust across different scenarios. In this work, we present DNA-Rendering, a large-scale, high-fidelity repository of human performance data for neural actor rendering. DNA-Rendering presents several alluring attributes. First, our dataset contains over 1500 human subjects, 5000 motion sequences, and 67.5M frames' data volume. Second, we provide rich assets for each subject -- 2D/3D human body keypoints, foreground masks, SMPLX models, cloth/accessory materials, multi-view images, and videos. These assets boost the current method's accuracy on downstream rendering tasks. Third, we construct a professional multi-view system to capture data, which contains 60 synchronous cameras with max 4096 x 3000 resolution, 15 fps speed, and stern camera calibration steps, ensuring high-quality resources for task training and evaluation. Along with the dataset, we provide a large-scale and quantitative benchmark in full-scale, with multiple tasks to evaluate the existing progress of novel view synthesis, novel pose animation synthesis, and novel identity rendering methods. In this manuscript, we describe our DNA-Rendering effort as a revealing of new observations, challenges, and future directions to human-centric rendering. The dataset, code, and benchmarks will be publicly available at https://dna-rendering.github.io/
HuMMan: Multi-Modal 4D Human Dataset for Versatile Sensing and Modeling
Apr 28, 2022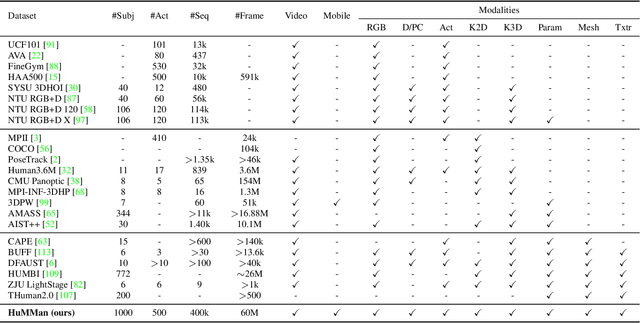
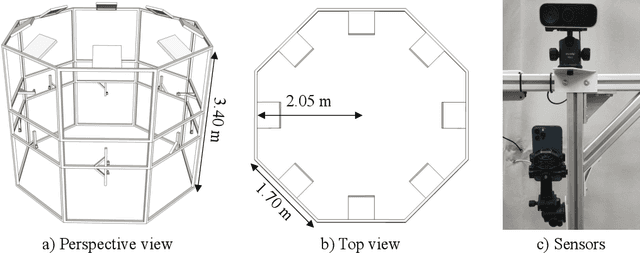
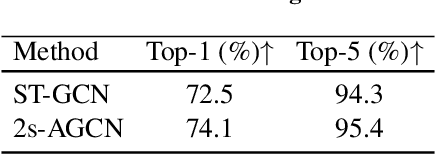
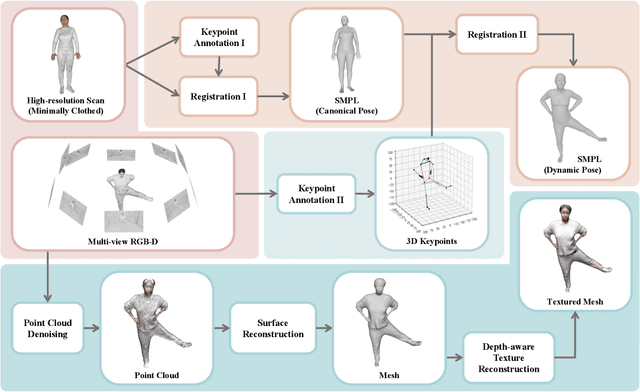
4D human sensing and modeling are fundamental tasks in vision and graphics with numerous applications. With the advances of new sensors and algorithms, there is an increasing demand for more versatile datasets. In this work, we contribute HuMMan, a large-scale multi-modal 4D human dataset with 1000 human subjects, 400k sequences and 60M frames. HuMMan has several appealing properties: 1) multi-modal data and annotations including color images, point clouds, keypoints, SMPL parameters, and textured meshes; 2) popular mobile device is included in the sensor suite; 3) a set of 500 actions, designed to cover fundamental movements; 4) multiple tasks such as action recognition, pose estimation, parametric human recovery, and textured mesh reconstruction are supported and evaluated. Extensive experiments on HuMMan voice the need for further study on challenges such as fine-grained action recognition, dynamic human mesh reconstruction, point cloud-based parametric human recovery, and cross-device domain gaps.
Playing for 3D Human Recovery
Oct 14, 2021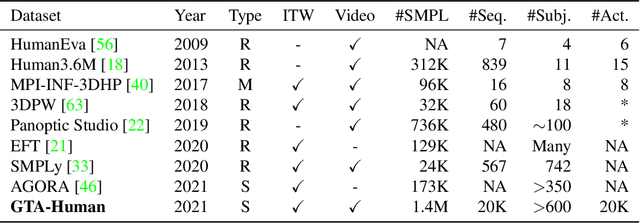

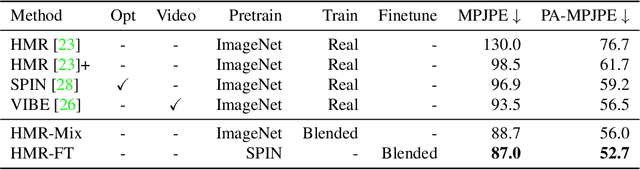
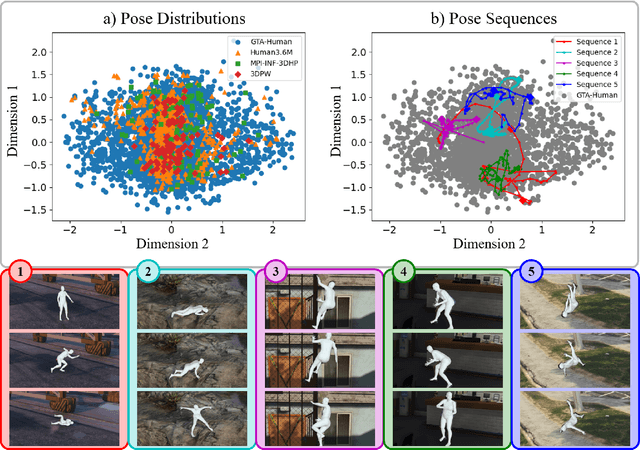
Image- and video-based 3D human recovery (i.e. pose and shape estimation) have achieved substantial progress. However, due to the prohibitive cost of motion capture, existing datasets are often limited in scale and diversity, which hinders the further development of more powerful models. In this work, we obtain massive human sequences as well as their 3D ground truths by playing video games. Specifically, we contribute, GTA-Human, a mega-scale and highly-diverse 3D human dataset generated with the GTA-V game engine. With a rich set of subjects, actions, and scenarios, GTA-Human serves as both an effective training source. Notably, the "unreasonable effectiveness of data" phenomenon is validated in 3D human recovery using our game-playing data. A simple frame-based baseline trained on GTA-Human already outperforms more sophisticated methods by a large margin; for video-based methods, GTA-Human demonstrates superiority over even the in-domain training set. We extend our study to larger models to observe the same consistent improvements, and the study on supervision signals suggests the rich collection of SMPL annotations is key. Furthermore, equipped with the diverse annotations in GTA-Human, we systematically investigate the performance of various methods under a wide spectrum of real-world variations, e.g. camera angles, poses, and occlusions. We hope our work could pave way for scaling up 3D human recovery to the real world.