 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSOLAMI: Social Vision-Language-Action Modeling for Immersive Interaction with 3D Autonomous Characters
Nov 29, 2024Human beings are social animals. How to equip 3D autonomous characters with similar social intelligence that can perceive, understand and interact with humans remains an open yet foundamental problem. In this paper, we introduce SOLAMI, the first end-to-end Social vision-Language-Action (VLA) Modeling framework for Immersive interaction with 3D autonomous characters. Specifically, SOLAMI builds 3D autonomous characters from three aspects: (1) Social VLA Architecture: We propose a unified social VLA framework to generate multimodal response (speech and motion) based on the user's multimodal input to drive the character for social interaction. (2) Interactive Multimodal Data: We present SynMSI, a synthetic multimodal social interaction dataset generated by an automatic pipeline using only existing motion datasets to address the issue of data scarcity. (3) Immersive VR Interface: We develop a VR interface that enables users to immersively interact with these characters driven by various architectures. Extensive quantitative experiments and user studies demonstrate that our framework leads to more precise and natural character responses (in both speech and motion) that align with user expectations with lower latency.
High-Order Evolving Graphs for Enhanced Representation of Traffic Dynamics
Sep 18, 2024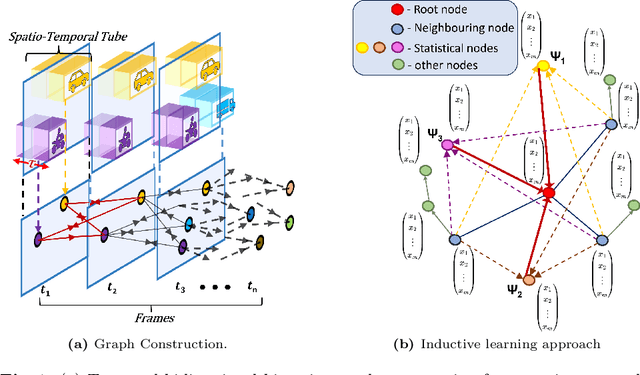

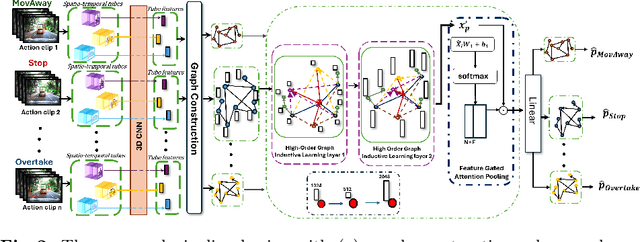
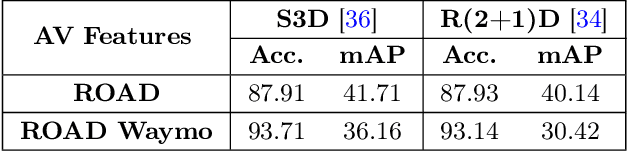
We present an innovative framework for traffic dynamics analysis using High-Order Evolving Graphs, designed to improve spatio-temporal representations in autonomous driving contexts. Our approach constructs temporal bidirectional bipartite graphs that effectively model the complex interactions within traffic scenes in real-time. By integrating Graph Neural Networks (GNNs) with high-order multi-aggregation strategies, we significantly enhance the modeling of traffic scene dynamics, providing a more accurate and detailed analysis of these interactions. Additionally, we incorporate inductive learning techniques inspired by the GraphSAGE framework, enabling our model to adapt to new and unseen traffic scenarios without the need for retraining, thus ensuring robust generalization. Through extensive experiments on the ROAD and ROAD Waymo datasets, we establish a comprehensive baseline for further developments, demonstrating the potential of our method in accurately capturing traffic behavior. Our results emphasize the value of high-order statistical moments and feature-gated attention mechanisms in improving traffic behavior analysis, laying the groundwork for advancing autonomous driving technologies. Our source code is available at: https://github.com/Addy-1998/High_Order_Graphs