 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIDER: IDempotent Experience Replay for Reliable Continual Learning
Mar 03, 2026Catastrophic forgetting, the tendency of neural networks to forget previously learned knowledge when learning new tasks, has been a major challenge in continual learning (CL). To tackle this challenge, CL methods have been proposed and shown to reduce forgetting. Furthermore, CL models deployed in mission-critical settings can benefit from uncertainty awareness by calibrating their predictions to reliably assess their confidences. However, existing uncertainty-aware continual learning methods suffer from high computational overhead and incompatibility with mainstream replay methods. To address this, we propose idempotent experience replay (IDER), a novel approach based on the idempotent property where repeated function applications yield the same output. Specifically, we first adapt the training loss to make model idempotent on current data streams. In addition, we introduce an idempotence distillation loss. We feed the output of the current model back into the old checkpoint and then minimize the distance between this reprocessed output and the original output of the current model. This yields a simple and effective new baseline for building reliable continual learners, which can be seamlessly integrated with other CL approaches. Extensive experiments on different CL benchmarks demonstrate that IDER consistently improves prediction reliability while simultaneously boosting accuracy and reducing forgetting. Our results suggest the potential of idempotence as a promising principle for deploying efficient and trustworthy continual learning systems in real-world applications.Our code is available at https://github.com/YutingLi0606/Idempotent-Continual-Learning.
Adaptive Value Decomposition: Coordinating a Varying Number of Agents in Urban Systems
Feb 10, 2026Multi-agent reinforcement learning (MARL) provides a promising paradigm for coordinating multi-agent systems (MAS). However, most existing methods rely on restrictive assumptions, such as a fixed number of agents and fully synchronous action execution. These assumptions are often violated in urban systems, where the number of active agents varies over time, and actions may have heterogeneous durations, resulting in a semi-MARL setting. Moreover, while sharing policy parameters among agents is commonly adopted to improve learning efficiency, it can lead to highly homogeneous actions when a subset of agents make decisions concurrently under similar observations, potentially degrading coordination quality. To address these challenges, we propose Adaptive Value Decomposition (AVD), a cooperative MARL framework that adapts to a dynamically changing agent population. AVD further incorporates a lightweight mechanism to mitigate action homogenization induced by shared policies, thereby encouraging behavioral diversity and maintaining effective cooperation among agents. In addition, we design a training-execution strategy tailored to the semi-MARL setting that accommodates asynchronous decision-making when some agents act at different times. Experiments on real-world bike-sharing redistribution tasks in two major cities, London and Washington, D.C., demonstrate that AVD outperforms state-of-the-art baselines, confirming its effectiveness and generalizability.
Spectral Disentanglement and Enhancement: A Dual-domain Contrastive Framework for Representation Learning
Feb 09, 2026Large-scale multimodal contrastive learning has recently achieved impressive success in learning rich and transferable representations, yet it remains fundamentally limited by the uniform treatment of feature dimensions and the neglect of the intrinsic spectral structure of the learned features. Empirical evidence indicates that high-dimensional embeddings tend to collapse into narrow cones, concentrating task-relevant semantics in a small subspace, while the majority of dimensions remain occupied by noise and spurious correlations. Such spectral imbalance and entanglement undermine model generalization. We propose Spectral Disentanglement and Enhancement (SDE), a novel framework that bridges the gap between the geometry of the embedded spaces and their spectral properties. Our approach leverages singular value decomposition to adaptively partition feature dimensions into strong signals that capture task-critical semantics, weak signals that reflect ancillary correlations, and noise representing irrelevant perturbations. A curriculum-based spectral enhancement strategy is then applied, selectively amplifying informative components with theoretical guarantees on training stability. Building upon the enhanced features, we further introduce a dual-domain contrastive loss that jointly optimizes alignment in both the feature and spectral spaces, effectively integrating spectral regularization into the training process and encouraging richer, more robust representations. Extensive experiments on large-scale multimodal benchmarks demonstrate that SDE consistently improves representation robustness and generalization, outperforming state-of-the-art methods. SDE integrates seamlessly with existing contrastive pipelines, offering an effective solution for multimodal representation learning.
Grad2Reward: From Sparse Judgment to Dense Rewards for Improving Open-Ended LLM Reasoning
Feb 02, 2026Reinforcement Learning with Verifiable Rewards (RLVR) has catalyzed significant breakthroughs in complex LLM reasoning within verifiable domains, such as mathematics and programming. Recent efforts have sought to extend this paradigm to open-ended tasks by employing LLMs-as-a-Judge to provide sequence-level rewards for policy optimization. However, these rewards are inherently sparse, failing to provide the fine-grained supervision necessary for generating complex, long-form trajectories. Furthermore, current work treats the Judge as a black-box oracle, discarding the rich intermediate feedback signals encoded in it. To address these limitations, we introduce Grad2Reward, a novel framework that extracts dense process rewards directly from the Judge's model inference process via a single backward pass. By leveraging gradient-based attribution, Grad2Reward enables precise token-level credit assignment, substantially enhancing training efficiency and reasoning quality. Additionally, Grad2Reward introduces a self-judging mechanism, allowing the policy to improve through its own evaluative signals without training specialized reward models or reliance on superior external Judges. The experiments demonstrate that policies optimized with Grad2Reward achieve outstanding performance across diverse open-ended tasks, affirming its effectiveness and broad generalizability.
Linking Process to Outcome: Conditional Reward Modeling for LLM Reasoning
Sep 30, 2025Process Reward Models (PRMs) have emerged as a promising approach to enhance the reasoning capabilities of large language models (LLMs) by guiding their step-by-step reasoning toward a final answer. However, existing PRMs either treat each reasoning step in isolation, failing to capture inter-step dependencies, or struggle to align process rewards with the final outcome. Consequently, the reward signal fails to respect temporal causality in sequential reasoning and faces ambiguous credit assignment. These limitations make downstream models vulnerable to reward hacking and lead to suboptimal performance. In this work, we propose Conditional Reward Modeling (CRM) that frames LLM reasoning as a temporal process leading to a correct answer. The reward of each reasoning step is not only conditioned on the preceding steps but also explicitly linked to the final outcome of the reasoning trajectory. By enforcing conditional probability rules, our design captures the causal relationships among reasoning steps, with the link to the outcome allowing precise attribution of each intermediate step, thereby resolving credit assignment ambiguity. Further, through this consistent probabilistic modeling, the rewards produced by CRM enable more reliable cross-sample comparison. Experiments across Best-of-N sampling, beam search and reinforcement learning demonstrate that CRM consistently outperforms existing reward models, offering a principled framework for enhancing LLM reasoning. In particular, CRM is more robust to reward hacking and delivers stable downstream improvements without relying on verifiable rewards derived from ground truth.
Learning to Select In-Context Demonstration Preferred by Large Language Model
May 26, 2025In-context learning (ICL) enables large language models (LLMs) to adapt to new tasks during inference using only a few demonstrations. However, ICL performance is highly dependent on the selection of these demonstrations. Recent work explores retrieval-based methods for selecting query-specific demonstrations, but these approaches often rely on surrogate objectives such as metric learning, failing to directly optimize ICL performance. Consequently, they struggle to identify truly beneficial demonstrations. Moreover, their discriminative retrieval paradigm is ineffective when the candidate pool lacks sufficient high-quality demonstrations. To address these challenges, we propose GenICL, a novel generative preference learning framework that leverages LLM feedback to directly optimize demonstration selection for ICL. Experiments on 19 datasets across 11 task categories demonstrate that GenICL achieves superior performance than existing methods in selecting the most effective demonstrations, leading to better ICL performance.
Causal Graph Guided Steering of LLM Values via Prompts and Sparse Autoencoders
Dec 31, 2024As large language models (LLMs) become increasingly integrated into critical applications, aligning their behavior with human values presents significant challenges. Current methods, such as Reinforcement Learning from Human Feedback (RLHF), often focus on a limited set of values and can be resource-intensive. Furthermore, the correlation between values has been largely overlooked and remains underutilized. Our framework addresses this limitation by mining a causal graph that elucidates the implicit relationships among various values within the LLMs. Leveraging the causal graph, we implement two lightweight mechanisms for value steering: prompt template steering and Sparse Autoencoder feature steering, and analyze the effects of altering one value dimension on others. Extensive experiments conducted on Gemma-2B-IT and Llama3-8B-IT demonstrate the effectiveness and controllability of our steering methods.
DWCL: Dual-Weighted Contrastive Learning for Multi-View Clustering
Nov 26, 2024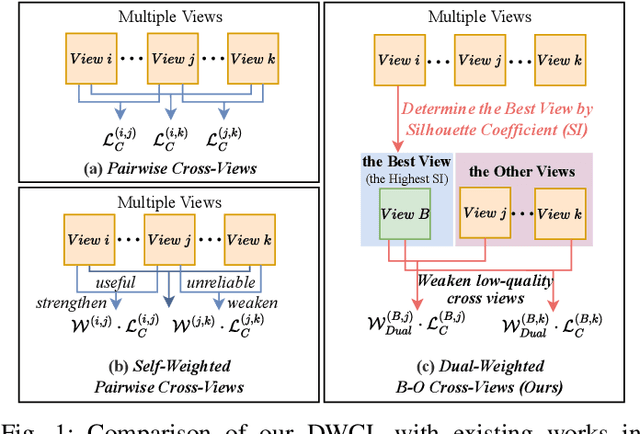
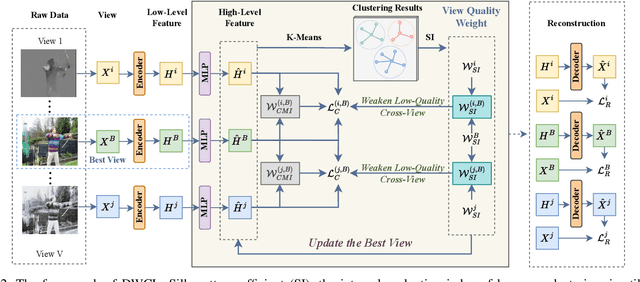
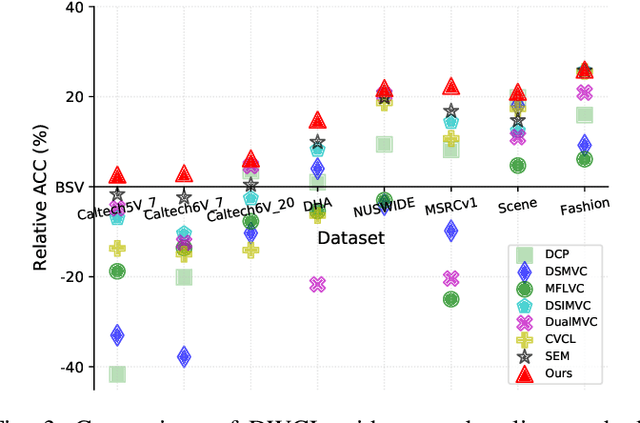
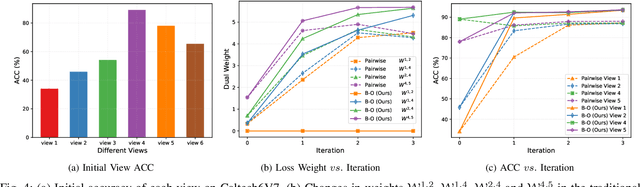
Multi-view contrastive clustering (MVCC) has gained significant attention for generating consistent clustering structures from multiple views through contrastive learning. However, most existing MVCC methods create cross-views by combining any two views, leading to a high volume of unreliable pairs. Furthermore, these approaches often overlook discrepancies in multi-view representations, resulting in representation degeneration. To address these challenges, we introduce a novel model called Dual-Weighted Contrastive Learning (DWCL) for Multi-View Clustering. Specifically, to reduce the impact of unreliable cross-views, we introduce an innovative Best-Other (B-O) contrastive mechanism that enhances the representation of individual views at a low computational cost. Furthermore, we develop a dual weighting strategy that combines a view quality weight, reflecting the quality of each view, with a view discrepancy weight. This approach effectively mitigates representation degeneration by downplaying cross-views that are both low in quality and high in discrepancy. We theoretically validate the efficiency of the B-O contrastive mechanism and the effectiveness of the dual weighting strategy. Extensive experiments demonstrate that DWCL outperforms previous methods across eight multi-view datasets, showcasing superior performance and robustness in MVCC. Specifically, our method achieves absolute accuracy improvements of 5.4\% and 5.6\% compared to state-of-the-art methods on the Caltech6V7 and MSRCv1 datasets, respectively.
A Contextual Combinatorial Bandit Approach to Negotiation
Jun 30, 2024



Learning effective negotiation strategies poses two key challenges: the exploration-exploitation dilemma and dealing with large action spaces. However, there is an absence of learning-based approaches that effectively address these challenges in negotiation. This paper introduces a comprehensive formulation to tackle various negotiation problems. Our approach leverages contextual combinatorial multi-armed bandits, with the bandits resolving the exploration-exploitation dilemma, and the combinatorial nature handles large action spaces. Building upon this formulation, we introduce NegUCB, a novel method that also handles common issues such as partial observations and complex reward functions in negotiation. NegUCB is contextual and tailored for full-bandit feedback without constraints on the reward functions. Under mild assumptions, it ensures a sub-linear regret upper bound. Experiments conducted on three negotiation tasks demonstrate the superiority of our approach.
CivRealm: A Learning and Reasoning Odyssey in Civilization for Decision-Making Agents
Jan 19, 2024



The generalization of decision-making agents encompasses two fundamental elements: learning from past experiences and reasoning in novel contexts. However, the predominant emphasis in most interactive environments is on learning, often at the expense of complexity in reasoning. In this paper, we introduce CivRealm, an environment inspired by the Civilization game. Civilization's profound alignment with human history and society necessitates sophisticated learning, while its ever-changing situations demand strong reasoning to generalize. Particularly, CivRealm sets up an imperfect-information general-sum game with a changing number of players; it presents a plethora of complex features, challenging the agent to deal with open-ended stochastic environments that require diplomacy and negotiation skills. Within CivRealm, we provide interfaces for two typical agent types: tensor-based agents that focus on learning, and language-based agents that emphasize reasoning. To catalyze further research, we present initial results for both paradigms. The canonical RL-based agents exhibit reasonable performance in mini-games, whereas both RL- and LLM-based agents struggle to make substantial progress in the full game. Overall, CivRealm stands as a unique learning and reasoning challenge for decision-making agents. The code is available at https://github.com/bigai-ai/civrealm.