 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrior Knowledge-enhanced Spatio-temporal Epidemic Forecasting
Feb 25, 2026Spatio-temporal epidemic forecasting is critical for public health management, yet existing methods often struggle with insensitivity to weak epidemic signals, over-simplified spatial relations, and unstable parameter estimation. To address these challenges, we propose the Spatio-Temporal priOr-aware Epidemic Predictor (STOEP), a novel hybrid framework that integrates implicit spatio-temporal priors and explicit expert priors. STOEP consists of three key components: (1) Case-aware Adjacency Learning (CAL), which dynamically adjusts mobility-based regional dependencies using historical infection patterns; (2) Space-informed Parameter Estimating (SPE), which employs learnable spatial priors to amplify weak epidemic signals; and (3) Filter-based Mechanistic Forecasting (FMF), which uses an expert-guided adaptive thresholding strategy to regularize epidemic parameters. Extensive experiments on real-world COVID-19 and influenza datasets demonstrate that STOEP outperforms the best baseline by 11.1% in RMSE. The system has been deployed at one provincial CDC in China to facilitate downstream applications.
Early and Prediagnostic Detection of Pancreatic Cancer from Computed Tomography
Jan 29, 2026Pancreatic ductal adenocarcinoma (PDAC), one of the deadliest solid malignancies, is often detected at a late and inoperable stage. Retrospective reviews of prediagnostic CT scans, when conducted by expert radiologists aware that the patient later developed PDAC, frequently reveal lesions that were previously overlooked. To help detecting these lesions earlier, we developed an automated system named ePAI (early Pancreatic cancer detection with Artificial Intelligence). It was trained on data from 1,598 patients from a single medical center. In the internal test involving 1,009 patients, ePAI achieved an area under the receiver operating characteristic curve (AUC) of 0.939-0.999, a sensitivity of 95.3%, and a specificity of 98.7% for detecting small PDAC less than 2 cm in diameter, precisely localizing PDAC as small as 2 mm. In an external test involving 7,158 patients across 6 centers, ePAI achieved an AUC of 0.918-0.945, a sensitivity of 91.5%, and a specificity of 88.0%, precisely localizing PDAC as small as 5 mm. Importantly, ePAI detected PDACs on prediagnostic CT scans obtained 3 to 36 months before clinical diagnosis that had originally been overlooked by radiologists. It successfully detected and localized PDACs in 75 of 159 patients, with a median lead time of 347 days before clinical diagnosis. Our multi-reader study showed that ePAI significantly outperformed 30 board-certified radiologists by 50.3% (P < 0.05) in sensitivity while maintaining a comparable specificity of 95.4% in detecting PDACs early and prediagnostic. These findings suggest its potential of ePAI as an assistive tool to improve early detection of pancreatic cancer.
IF-GEO: Conflict-Aware Instruction Fusion for Multi-Query Generative Engine Optimization
Jan 20, 2026As Generative Engines revolutionize information retrieval by synthesizing direct answers from retrieved sources, ensuring source visibility becomes a significant challenge. Improving it through targeted content revisions is a practical strategy termed Generative Engine Optimization (GEO). However, optimizing a document for diverse queries presents a constrained optimization challenge where heterogeneous queries often impose conflicting and competing revision requirements under a limited content budget. To address this challenge, we propose IF-GEO, a "diverge-then-converge" framework comprising two phases: (i) mining distinct optimization preferences from representative latent queries; (ii) synthesizing a Global Revision Blueprint for guided editing by coordinating preferences via conflict-aware instruction fusion. To explicitly quantify IF-GEO's objective of cross-query stability, we introduce risk-aware stability metrics. Experiments on multi-query benchmarks demonstrate that IF-GEO achieves substantial performance gains while maintaining robustness across diverse retrieval scenarios.
Enhancing Adversarial Robustness with Conformal Prediction: A Framework for Guaranteed Model Reliability
Jun 09, 2025As deep learning models are increasingly deployed in high-risk applications, robust defenses against adversarial attacks and reliable performance guarantees become paramount. Moreover, accuracy alone does not provide sufficient assurance or reliable uncertainty estimates for these models. This study advances adversarial training by leveraging principles from Conformal Prediction. Specifically, we develop an adversarial attack method, termed OPSA (OPtimal Size Attack), designed to reduce the efficiency of conformal prediction at any significance level by maximizing model uncertainty without requiring coverage guarantees. Correspondingly, we introduce OPSA-AT (Adversarial Training), a defense strategy that integrates OPSA within a novel conformal training paradigm. Experimental evaluations demonstrate that our OPSA attack method induces greater uncertainty compared to baseline approaches for various defenses. Conversely, our OPSA-AT defensive model significantly enhances robustness not only against OPSA but also other adversarial attacks, and maintains reliable prediction. Our findings highlight the effectiveness of this integrated approach for developing trustworthy and resilient deep learning models for safety-critical domains. Our code is available at https://github.com/bjbbbb/Enhancing-Adversarial-Robustness-with-Conformal-Prediction.
Residual Reweighted Conformal Prediction for Graph Neural Networks
Jun 09, 2025Graph Neural Networks (GNNs) excel at modeling relational data but face significant challenges in high-stakes domains due to unquantified uncertainty. Conformal prediction (CP) offers statistical coverage guarantees, but existing methods often produce overly conservative prediction intervals that fail to account for graph heteroscedasticity and structural biases. While residual reweighting CP variants address some of these limitations, they neglect graph topology, cluster-specific uncertainties, and risk data leakage by reusing training sets. To address these issues, we propose Residual Reweighted GNN (RR-GNN), a framework designed to generate minimal prediction sets with provable marginal coverage guarantees. RR-GNN introduces three major innovations to enhance prediction performance. First, it employs Graph-Structured Mondrian CP to partition nodes or edges into communities based on topological features, ensuring cluster-conditional coverage that reflects heterogeneity. Second, it uses Residual-Adaptive Nonconformity Scores by training a secondary GNN on a held-out calibration set to estimate task-specific residuals, dynamically adjusting prediction intervals according to node or edge uncertainty. Third, it adopts a Cross-Training Protocol, which alternates the optimization of the primary GNN and the residual predictor to prevent information leakage while maintaining graph dependencies. We validate RR-GNN on 15 real-world graphs across diverse tasks, including node classification, regression, and edge weight prediction. Compared to CP baselines, RR-GNN achieves improved efficiency over state-of-the-art methods, with no loss of coverage.
Structure-Aware Stylized Image Synthesis for Robust Medical Image Segmentation
Dec 05, 2024



Accurate medical image segmentation is essential for effective diagnosis and treatment planning but is often challenged by domain shifts caused by variations in imaging devices, acquisition conditions, and patient-specific attributes. Traditional domain generalization methods typically require inclusion of parts of the test domain within the training set, which is not always feasible in clinical settings with limited diverse data. Additionally, although diffusion models have demonstrated strong capabilities in image generation and style transfer, they often fail to preserve the critical structural information necessary for precise medical analysis. To address these issues, we propose a novel medical image segmentation method that combines diffusion models and Structure-Preserving Network for structure-aware one-shot image stylization. Our approach effectively mitigates domain shifts by transforming images from various sources into a consistent style while maintaining the location, size, and shape of lesions. This ensures robust and accurate segmentation even when the target domain is absent from the training data. Experimental evaluations on colonoscopy polyp segmentation and skin lesion segmentation datasets show that our method enhances the robustness and accuracy of segmentation models, achieving superior performance metrics compared to baseline models without style transfer. This structure-aware stylization framework offers a practical solution for improving medical image segmentation across diverse domains, facilitating more reliable clinical diagnoses.
Game-Theoretic Defenses for Robust Conformal Prediction Against Adversarial Attacks in Medical Imaging
Nov 07, 2024

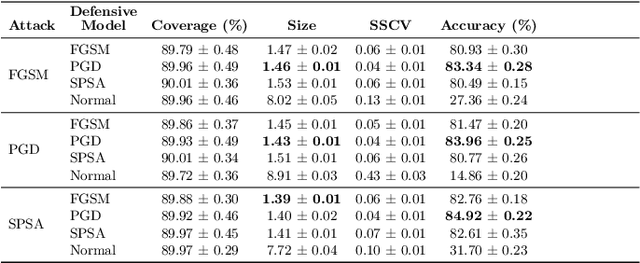

Adversarial attacks pose significant threats to the reliability and safety of deep learning models, especially in critical domains such as medical imaging. This paper introduces a novel framework that integrates conformal prediction with game-theoretic defensive strategies to enhance model robustness against both known and unknown adversarial perturbations. We address three primary research questions: constructing valid and efficient conformal prediction sets under known attacks (RQ1), ensuring coverage under unknown attacks through conservative thresholding (RQ2), and determining optimal defensive strategies within a zero-sum game framework (RQ3). Our methodology involves training specialized defensive models against specific attack types and employing maximum and minimum classifiers to aggregate defenses effectively. Extensive experiments conducted on the MedMNIST datasets, including PathMNIST, OrganAMNIST, and TissueMNIST, demonstrate that our approach maintains high coverage guarantees while minimizing prediction set sizes. The game-theoretic analysis reveals that the optimal defensive strategy often converges to a singular robust model, outperforming uniform and simple strategies across all evaluated datasets. This work advances the state-of-the-art in uncertainty quantification and adversarial robustness, providing a reliable mechanism for deploying deep learning models in adversarial environments.
LLM-Oriented Retrieval Tuner
Mar 04, 2024



Dense Retrieval (DR) is now considered as a promising tool to enhance the memorization capacity of Large Language Models (LLM) such as GPT3 and GPT-4 by incorporating external memories. However, due to the paradigm discrepancy between text generation of LLM and DR, it is still an open challenge to integrate the retrieval and generation tasks in a shared LLM. In this paper, we propose an efficient LLM-Oriented Retrieval Tuner, namely LMORT, which decouples DR capacity from base LLM and non-invasively coordinates the optimally aligned and uniform layers of the LLM towards a unified DR space, achieving an efficient and effective DR without tuning the LLM itself. The extensive experiments on six BEIR datasets show that our approach could achieve competitive zero-shot retrieval performance compared to a range of strong DR models while maintaining the generation ability of LLM.
Rethinking Dense Retrieval's Few-Shot Ability
Apr 12, 2023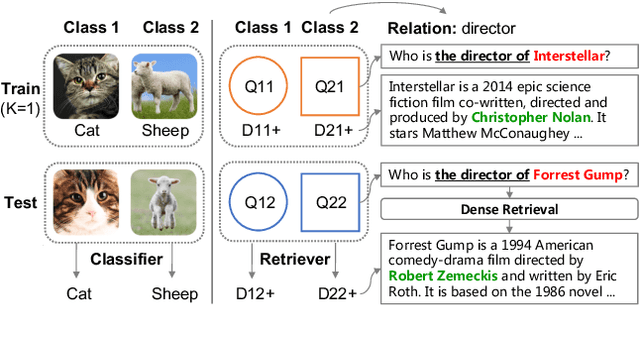
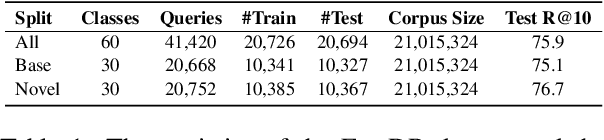

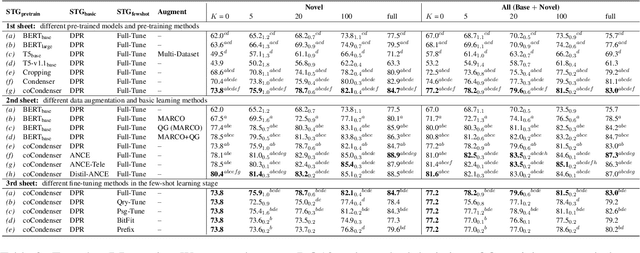
Few-shot dense retrieval (DR) aims to effectively generalize to novel search scenarios by learning a few samples. Despite its importance, there is little study on specialized datasets and standardized evaluation protocols. As a result, current methods often resort to random sampling from supervised datasets to create "few-data" setups and employ inconsistent training strategies during evaluations, which poses a challenge in accurately comparing recent progress. In this paper, we propose a customized FewDR dataset and a unified evaluation benchmark. Specifically, FewDR employs class-wise sampling to establish a standardized "few-shot" setting with finely-defined classes, reducing variability in multiple sampling rounds. Moreover, the dataset is disjointed into base and novel classes, allowing DR models to be continuously trained on ample data from base classes and a few samples in novel classes. This benchmark eliminates the risk of novel class leakage, providing a reliable estimation of the DR model's few-shot ability. Our extensive empirical results reveal that current state-of-the-art DR models still face challenges in the standard few-shot scene. Our code and data will be open-sourced at https://github.com/OpenMatch/ANCE-Tele.
Scientific Computing Algorithms to Learn Enhanced Scalable Surrogates for Mesh Physics
Apr 01, 2023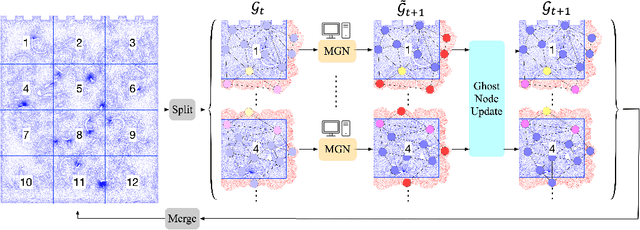
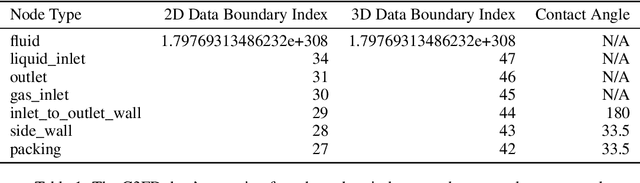
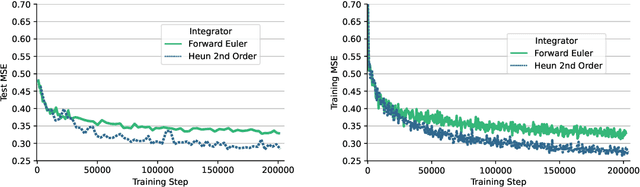
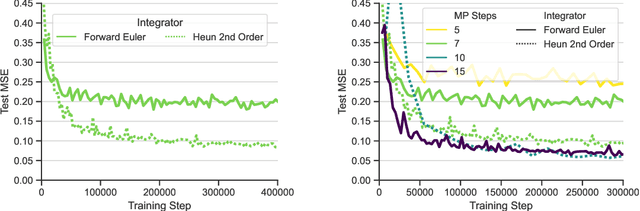
Data-driven modeling approaches can produce fast surrogates to study large-scale physics problems. Among them, graph neural networks (GNNs) that operate on mesh-based data are desirable because they possess inductive biases that promote physical faithfulness, but hardware limitations have precluded their application to large computational domains. We show that it is \textit{possible} to train a class of GNN surrogates on 3D meshes. We scale MeshGraphNets (MGN), a subclass of GNNs for mesh-based physics modeling, via our domain decomposition approach to facilitate training that is mathematically equivalent to training on the whole domain under certain conditions. With this, we were able to train MGN on meshes with \textit{millions} of nodes to generate computational fluid dynamics (CFD) simulations. Furthermore, we show how to enhance MGN via higher-order numerical integration, which can reduce MGN's error and training time. We validated our methods on an accompanying dataset of 3D $\text{CO}_2$-capture CFD simulations on a 3.1M-node mesh. This work presents a practical path to scaling MGN for real-world applications.