 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLinking Perception, Confidence and Accuracy in MLLMs
Mar 12, 2026Recent advances in Multi-modal Large Language Models (MLLMs) have predominantly focused on enhancing visual perception to improve accuracy. However, a critical question remains unexplored: Do models know when they do not know? Through a probing experiment, we reveal a severe confidence miscalibration problem in MLLMs. To address this, we propose Confidence-Driven Reinforcement Learning (CDRL), which uses original-noise image pairs and a novel confidence-based reward to enhance perceptual sensitivity and robustly calibrate the model's confidence. Beyond training benefits, calibrated confidence enables more effective test-time scaling as a free lunch. We further propose Confidence-Aware Test-Time Scaling (CA-TTS), which dynamically coordinates Self-Consistency, Self-Reflection, and Visual Self-Check modules guided by confidence signals. An Expert Model acts in multiple roles (e.g., Planner, Critic, Voter) to schedule these modules and provide external verification. Our integrated framework establishes new state-of-the-art results with consistent 8.8% gains across four benchmarks. More ablation studies demonstrate the effectiveness of each module and scaling superiority.
Real-World Computational Aberration Correction via Quantized Domain-Mixing Representation
Mar 15, 2024Relying on paired synthetic data, existing learning-based Computational Aberration Correction (CAC) methods are confronted with the intricate and multifaceted synthetic-to-real domain gap, which leads to suboptimal performance in real-world applications. In this paper, in contrast to improving the simulation pipeline, we deliver a novel insight into real-world CAC from the perspective of Unsupervised Domain Adaptation (UDA). By incorporating readily accessible unpaired real-world data into training, we formalize the Domain Adaptive CAC (DACAC) task, and then introduce a comprehensive Real-world aberrated images (Realab) dataset to benchmark it. The setup task presents a formidable challenge due to the intricacy of understanding the target aberration domain. To this intent, we propose a novel Quntized Domain-Mixing Representation (QDMR) framework as a potent solution to the issue. QDMR adapts the CAC model to the target domain from three key aspects: (1) reconstructing aberrated images of both domains by a VQGAN to learn a Domain-Mixing Codebook (DMC) which characterizes the degradation-aware priors; (2) modulating the deep features in CAC model with DMC to transfer the target domain knowledge; and (3) leveraging the trained VQGAN to generate pseudo target aberrated images from the source ones for convincing target domain supervision. Extensive experiments on both synthetic and real-world benchmarks reveal that the models with QDMR consistently surpass the competitive methods in mitigating the synthetic-to-real gap, which produces visually pleasant real-world CAC results with fewer artifacts. Codes and datasets will be made publicly available.
SGE: Structured Light System Based on Gray Code with an Event Camera
Mar 12, 2024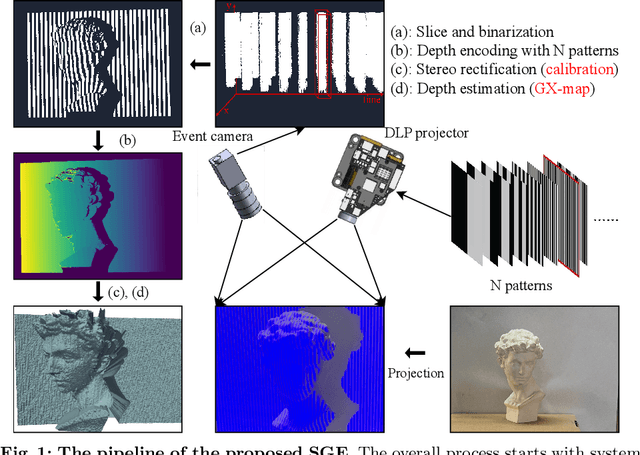

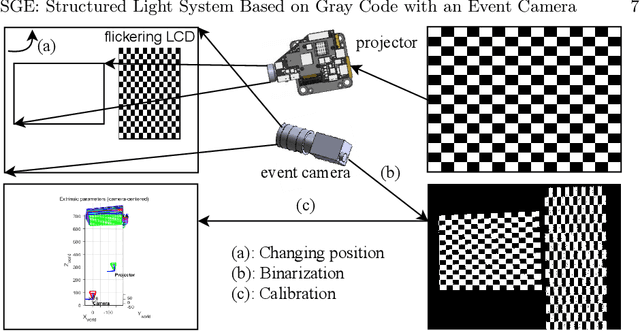
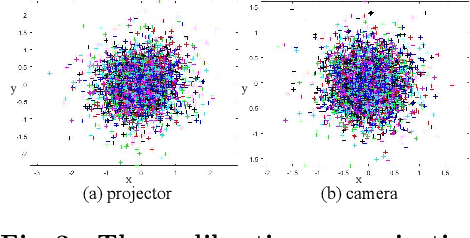
Fast and accurate depth sensing has long been a significant research challenge. Event camera, as a device that quickly responds to intensity changes, provides a new solution for structured light (SL) systems. In this paper, we introduce Gray code into event-based SL systems for the first time. Our setup includes an event camera and Digital Light Processing (DLP) projector, enabling depth estimation through high-speed projection and decoding of Gray code patterns. By employing spatio-temporal encoding for point matching, our method is immune to timestamp noise, realizing high-speed depth estimation without loss of accuracy. The binary nature of events and Gray code minimizes data redundancy, enabling us to fully utilize sensor bandwidth at 100%. Experimental results show that our approach achieves accuracy comparable to state-of-the-art scanning methods while surpassing them in data acquisition speed (up to 41 times improvement) without sacrificing accuracy. Our proposed approach offers a highly promising solution for ultra-fast, real-time, and high-precision dense depth estimation. Code and dataset will be publicly available.
Scientific Computing Algorithms to Learn Enhanced Scalable Surrogates for Mesh Physics
Apr 01, 2023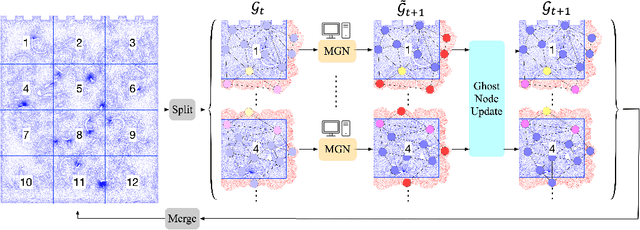
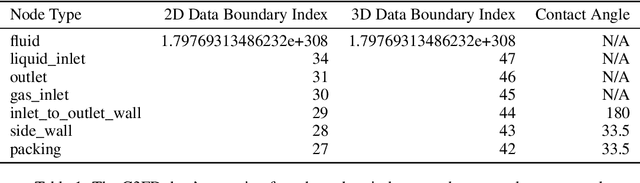
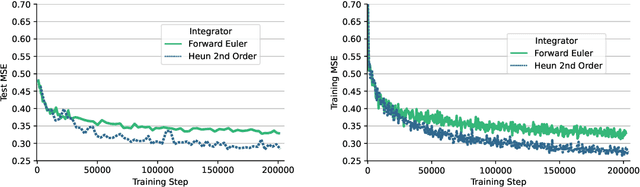
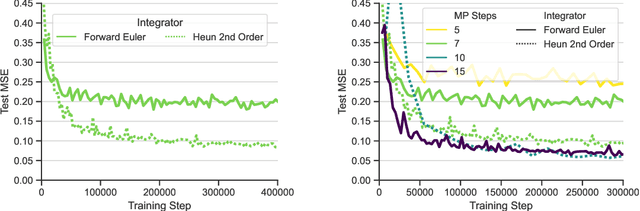
Data-driven modeling approaches can produce fast surrogates to study large-scale physics problems. Among them, graph neural networks (GNNs) that operate on mesh-based data are desirable because they possess inductive biases that promote physical faithfulness, but hardware limitations have precluded their application to large computational domains. We show that it is \textit{possible} to train a class of GNN surrogates on 3D meshes. We scale MeshGraphNets (MGN), a subclass of GNNs for mesh-based physics modeling, via our domain decomposition approach to facilitate training that is mathematically equivalent to training on the whole domain under certain conditions. With this, we were able to train MGN on meshes with \textit{millions} of nodes to generate computational fluid dynamics (CFD) simulations. Furthermore, we show how to enhance MGN via higher-order numerical integration, which can reduce MGN's error and training time. We validated our methods on an accompanying dataset of 3D $\text{CO}_2$-capture CFD simulations on a 3.1M-node mesh. This work presents a practical path to scaling MGN for real-world applications.
Universality of parametric Coupling Flows over parametric diffeomorphisms
Feb 08, 2022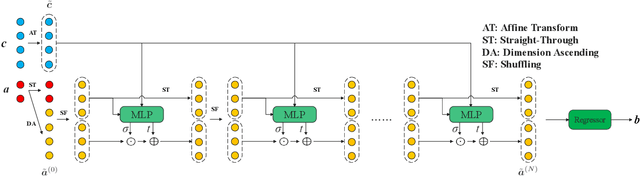
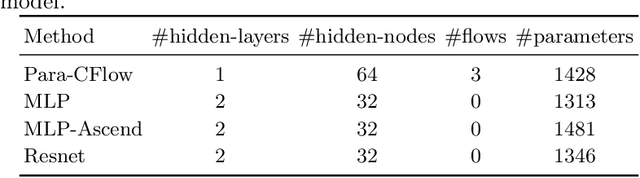
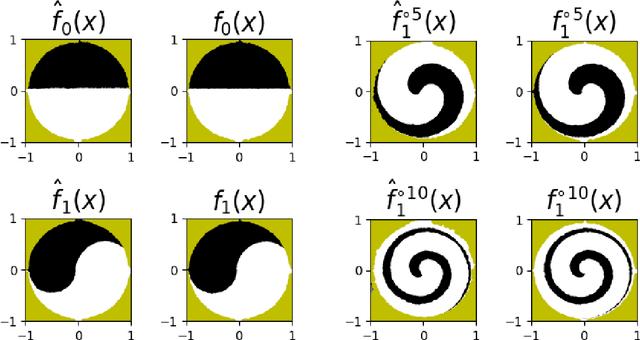
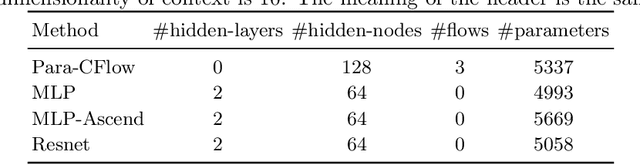
Invertible neural networks based on Coupling Flows CFlows) have various applications such as image synthesis and data compression. The approximation universality for CFlows is of paramount importance to ensure the model expressiveness. In this paper, we prove that CFlows can approximate any diffeomorphism in C^k-norm if its layers can approximate certain single-coordinate transforms. Specifically, we derive that a composition of affine coupling layers and invertible linear transforms achieves this universality. Furthermore, in parametric cases where the diffeomorphism depends on some extra parameters, we prove the corresponding approximation theorems for our proposed parametric coupling flows named Para-CFlows. In practice, we apply Para-CFlows as a neural surrogate model in contextual Bayesian optimization tasks, to demonstrate its superiority over other neural surrogate models in terms of optimization performance.
Latent Space Simulation for Carbon Capture Design Optimization
Dec 22, 2021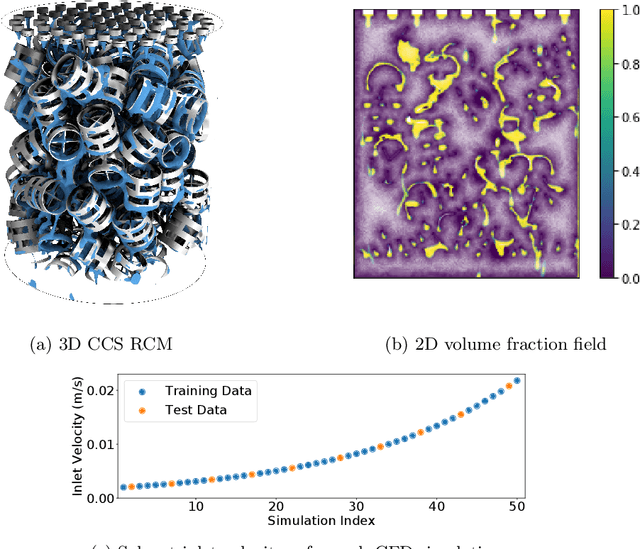

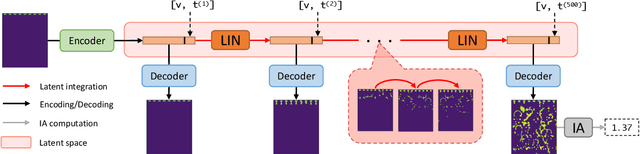

The CO2 capture efficiency in solvent-based carbon capture systems (CCSs) critically depends on the gas-solvent interfacial area (IA), making maximization of IA a foundational challenge in CCS design. While the IA associated with a particular CCS design can be estimated via a computational fluid dynamics (CFD) simulation, using CFD to derive the IAs associated with numerous CCS designs is prohibitively costly. Fortunately, previous works such as Deep Fluids (DF) (Kim et al., 2019) show that large simulation speedups are achievable by replacing CFD simulators with neural network (NN) surrogates that faithfully mimic the CFD simulation process. This raises the possibility of a fast, accurate replacement for a CFD simulator and therefore efficient approximation of the IAs required by CCS design optimization. Thus, here, we build on the DF approach to develop surrogates that can successfully be applied to our complex carbon-capture CFD simulations. Our optimized DF-style surrogates produce large speedups (4000x) while obtaining IA relative errors as low as 4% on unseen CCS configurations that lie within the range of training configurations. This hints at the promise of NN surrogates for our CCS design optimization problem. Nonetheless, DF has inherent limitations with respect to CCS design (e.g., limited transferability of trained models to new CCS packings). We conclude with ideas to address these challenges.
OpenMPR: Recognize Places Using Multimodal Data for People with Visual Impairments
Sep 15, 2019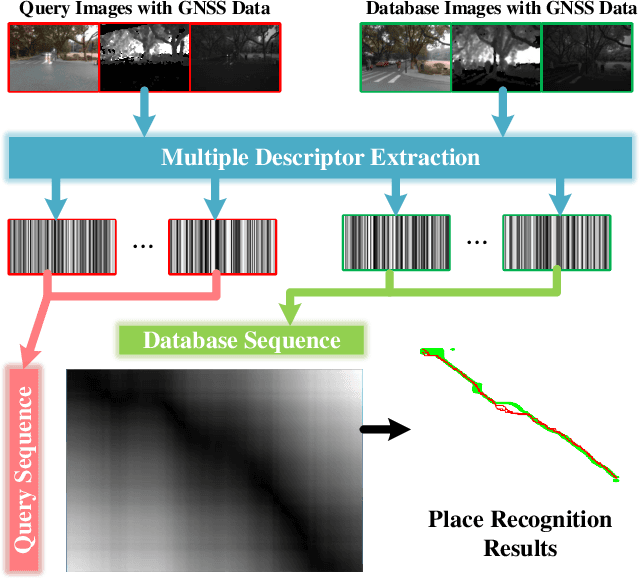
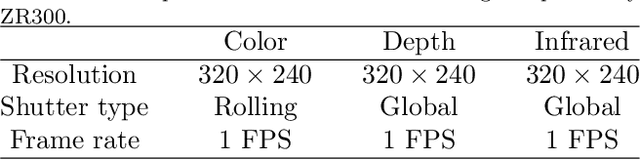
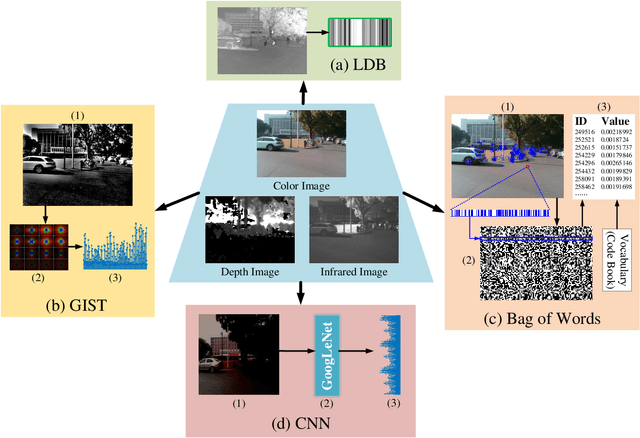

Place recognition plays a crucial role in navigational assistance, and is also a challenging issue of assistive technology. The place recognition is prone to erroneous localization owing to various changes between database and query images. Aiming at the wearable assistive device for visually impaired people, we propose an open-sourced place recognition algorithm OpenMPR, which utilizes the multimodal data to address the challenging issues of place recognition. Compared with conventional place recognition, the proposed OpenMPR not only leverages multiple effective descriptors, but also assigns different weights to those descriptors in image matching. Incorporating GNSS data into the algorithm, the cone-based sequence searching is used for robust place recognition. The experiments illustrate that the proposed algorithm manages to solve the place recognition issue in the real-world scenarios and surpass the state-of-the-art algorithms in terms of assistive navigation performance. On the real-world testing dataset, the online OpenMPR achieves 88.7% precision at 100% recall without illumination changes, and achieves 57.8% precision at 99.3% recall with illumination changes. The OpenMPR is available at https://github.com/chengricky/OpenMultiPR.