 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSGE: Structured Light System Based on Gray Code with an Event Camera
Paper and Code
Mar 12, 2024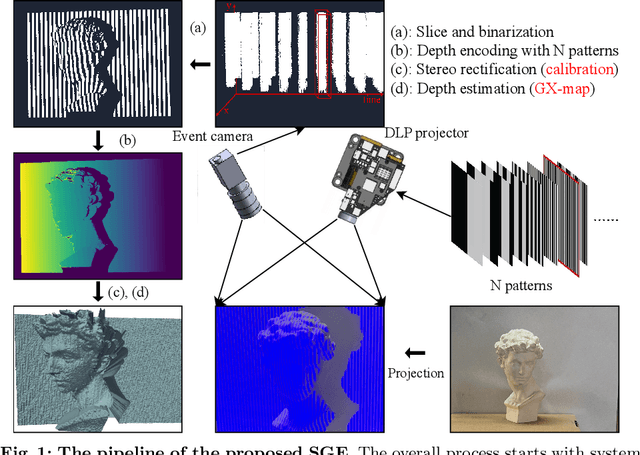

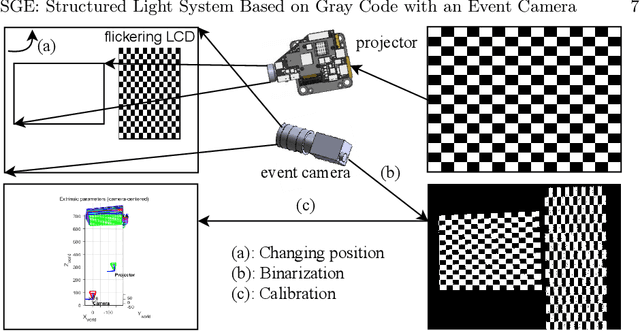
Fast and accurate depth sensing has long been a significant research challenge. Event camera, as a device that quickly responds to intensity changes, provides a new solution for structured light (SL) systems. In this paper, we introduce Gray code into event-based SL systems for the first time. Our setup includes an event camera and Digital Light Processing (DLP) projector, enabling depth estimation through high-speed projection and decoding of Gray code patterns. By employing spatio-temporal encoding for point matching, our method is immune to timestamp noise, realizing high-speed depth estimation without loss of accuracy. The binary nature of events and Gray code minimizes data redundancy, enabling us to fully utilize sensor bandwidth at 100%. Experimental results show that our approach achieves accuracy comparable to state-of-the-art scanning methods while surpassing them in data acquisition speed (up to 41 times improvement) without sacrificing accuracy. Our proposed approach offers a highly promising solution for ultra-fast, real-time, and high-precision dense depth estimation. Code and dataset will be publicly available.