 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEI-Nexus: Towards Unmediated and Flexible Inter-Modality Local Feature Extraction and Matching for Event-Image Data
Oct 29, 2024



Event cameras, with high temporal resolution and high dynamic range, have limited research on the inter-modality local feature extraction and matching of event-image data. We propose EI-Nexus, an unmediated and flexible framework that integrates two modality-specific keypoint extractors and a feature matcher. To achieve keypoint extraction across viewpoint and modality changes, we bring Local Feature Distillation (LFD), which transfers the viewpoint consistency from a well-learned image extractor to the event extractor, ensuring robust feature correspondence. Furthermore, with the help of Context Aggregation (CA), a remarkable enhancement is observed in feature matching. We further establish the first two inter-modality feature matching benchmarks, MVSEC-RPE and EC-RPE, to assess relative pose estimation on event-image data. Our approach outperforms traditional methods that rely on explicit modal transformation, offering more unmediated and adaptable feature extraction and matching, achieving better keypoint similarity and state-of-the-art results on the MVSEC-RPE and EC-RPE benchmarks. The source code and benchmarks will be made publicly available at https://github.com/ZhonghuaYi/EI-Nexus_official.
SGE: Structured Light System Based on Gray Code with an Event Camera
Mar 12, 2024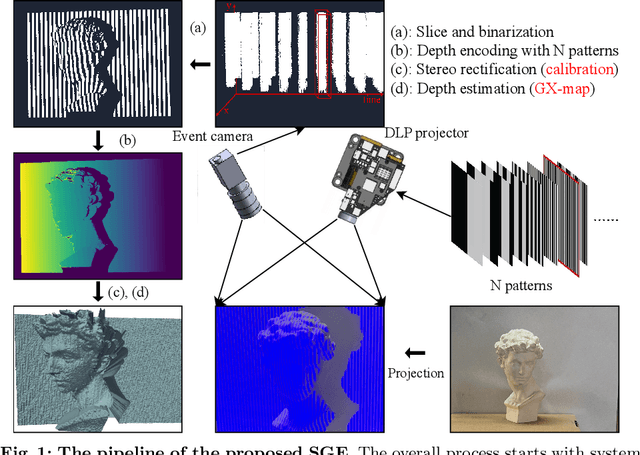

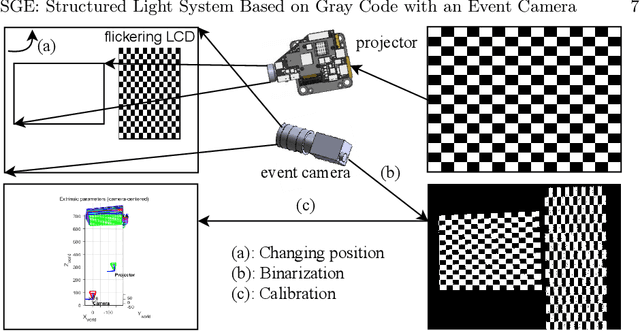
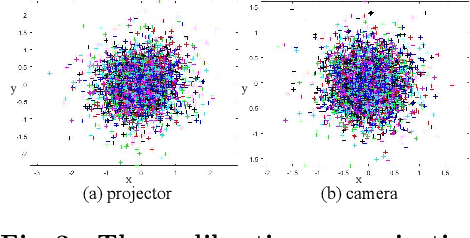
Fast and accurate depth sensing has long been a significant research challenge. Event camera, as a device that quickly responds to intensity changes, provides a new solution for structured light (SL) systems. In this paper, we introduce Gray code into event-based SL systems for the first time. Our setup includes an event camera and Digital Light Processing (DLP) projector, enabling depth estimation through high-speed projection and decoding of Gray code patterns. By employing spatio-temporal encoding for point matching, our method is immune to timestamp noise, realizing high-speed depth estimation without loss of accuracy. The binary nature of events and Gray code minimizes data redundancy, enabling us to fully utilize sensor bandwidth at 100%. Experimental results show that our approach achieves accuracy comparable to state-of-the-art scanning methods while surpassing them in data acquisition speed (up to 41 times improvement) without sacrificing accuracy. Our proposed approach offers a highly promising solution for ultra-fast, real-time, and high-precision dense depth estimation. Code and dataset will be publicly available.
Improving Fast Auto-Focus with Event Polarity
Mar 15, 2023Fast and accurate auto-focus in adverse conditions remains an arduous task. The paper presents a polarity-based event camera auto-focus algorithm featuring high-speed, precise auto-focus in dark, dynamic scenes that conventional frame-based cameras cannot match. Specifically, the symmetrical relationship between the event polarities in focusing is investigated, and the event-based focus evaluation function is proposed based on the principles of the event cameras and the imaging model in the focusing process. Comprehensive experiments on the public EAD dataset show the robustness of the model. Furthermore, precise focus with less than one depth of focus is achieved within 0.004 seconds on our self-built high-speed focusing platform. The dataset and code will be made publicly available.