 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporal-Mapping Photography for Event Cameras
Mar 11, 2024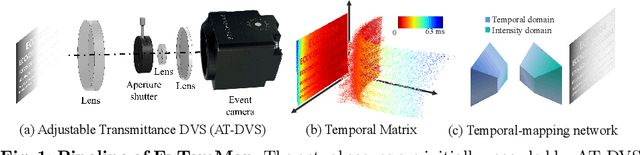



Event cameras, or Dynamic Vision Sensors (DVS) are novel neuromorphic sensors that capture brightness changes as a continuous stream of ``events'' rather than traditional intensity frames. Converting sparse events to dense intensity frames faithfully has long been an ill-posed problem. Previous methods have primarily focused on converting events to video in dynamic scenes or with a moving camera. In this paper, for the first time, we realize events to dense intensity image conversion using a stationary event camera in static scenes. Different from traditional methods that mainly rely on event integration, the proposed Event-Based Temporal Mapping Photography (EvTemMap) measures the time of event emitting for each pixel. Then, the resulting Temporal Matrix is converted to an intensity frame with a temporal mapping neural network. At the hardware level, the proposed EvTemMap is implemented by combining a transmittance adjustment device with a DVS, named Adjustable Transmittance Dynamic Vision Sensor. Additionally, we collected TemMat dataset under various conditions including low-light and high dynamic range scenes. The experimental results showcase the high dynamic range, fine-grained details, and high-grayscale-resolution of the proposed EvTemMap, as well as the enhanced performance on downstream computer vision tasks compared to other methods. The code and TemMat dataset will be made publicly available.
Improving Fast Auto-Focus with Event Polarity
Mar 15, 2023Fast and accurate auto-focus in adverse conditions remains an arduous task. The paper presents a polarity-based event camera auto-focus algorithm featuring high-speed, precise auto-focus in dark, dynamic scenes that conventional frame-based cameras cannot match. Specifically, the symmetrical relationship between the event polarities in focusing is investigated, and the event-based focus evaluation function is proposed based on the principles of the event cameras and the imaging model in the focusing process. Comprehensive experiments on the public EAD dataset show the robustness of the model. Furthermore, precise focus with less than one depth of focus is achieved within 0.004 seconds on our self-built high-speed focusing platform. The dataset and code will be made publicly available.