 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLow-Light Image Enhancement using Event-Based Illumination Estimation
Apr 13, 2025Low-light image enhancement (LLIE) aims to improve the visibility of images captured in poorly lit environments. Prevalent event-based solutions primarily utilize events triggered by motion, i.e., ''motion events'' to strengthen only the edge texture, while leaving the high dynamic range and excellent low-light responsiveness of event cameras largely unexplored. This paper instead opens a new avenue from the perspective of estimating the illumination using ''temporal-mapping'' events, i.e., by converting the timestamps of events triggered by a transmittance modulation into brightness values. The resulting fine-grained illumination cues facilitate a more effective decomposition and enhancement of the reflectance component in low-light images through the proposed Illumination-aided Reflectance Enhancement module. Furthermore, the degradation model of temporal-mapping events under low-light condition is investigated for realistic training data synthesizing. To address the lack of datasets under this regime, we construct a beam-splitter setup and collect EvLowLight dataset that includes images, temporal-mapping events, and motion events. Extensive experiments across 5 synthetic datasets and our real-world EvLowLight dataset substantiate that the devised pipeline, dubbed RetinEV, excels in producing well-illuminated, high dynamic range images, outperforming previous state-of-the-art event-based methods by up to 6.62 dB, while maintaining an efficient inference speed of 35.6 frame-per-second on a 640X480 image.
One-Step Event-Driven High-Speed Autofocus
Mar 03, 2025



High-speed autofocus in extreme scenes remains a significant challenge. Traditional methods rely on repeated sampling around the focus position, resulting in ``focus hunting''. Event-driven methods have advanced focusing speed and improved performance in low-light conditions; however, current approaches still require at least one lengthy round of ``focus hunting'', involving the collection of a complete focus stack. We introduce the Event Laplacian Product (ELP) focus detection function, which combines event data with grayscale Laplacian information, redefining focus search as a detection task. This innovation enables the first one-step event-driven autofocus, cutting focusing time by up to two-thirds and reducing focusing error by 24 times on the DAVIS346 dataset and 22 times on the EVK4 dataset. Additionally, we present an autofocus pipeline tailored for event-only cameras, achieving accurate results across a range of challenging motion and lighting conditions. All datasets and code will be made publicly available.
E-3DGS: Gaussian Splatting with Exposure and Motion Events
Oct 22, 2024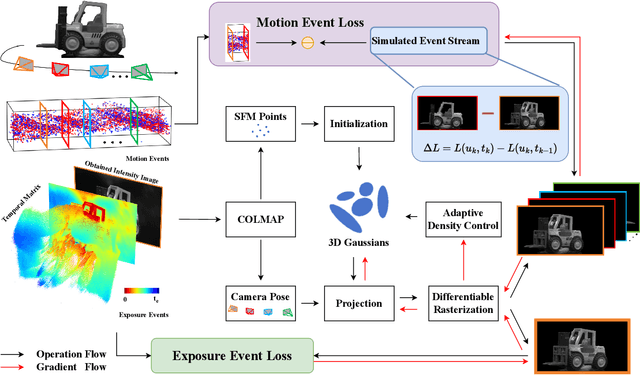
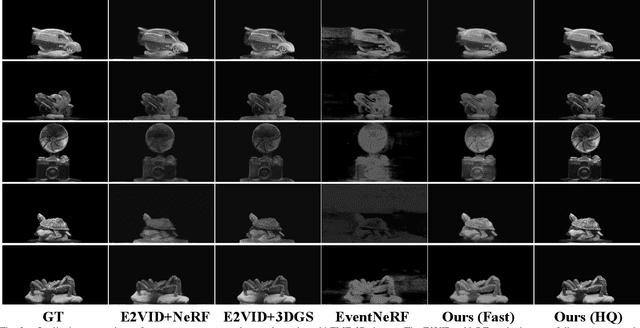
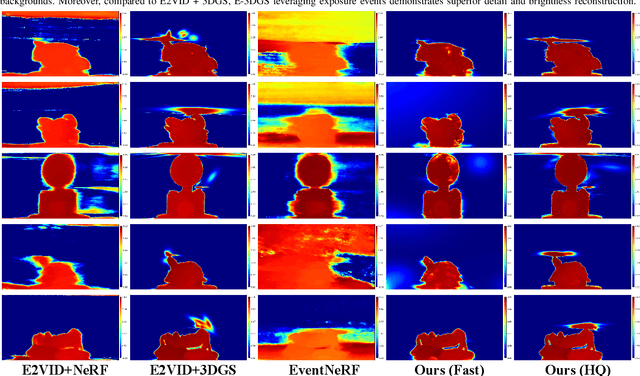
Estimating Neural Radiance Fields (NeRFs) from images captured under optimal conditions has been extensively explored in the vision community. However, robotic applications often face challenges such as motion blur, insufficient illumination, and high computational overhead, which adversely affect downstream tasks like navigation, inspection, and scene visualization. To address these challenges, we propose E-3DGS, a novel event-based approach that partitions events into motion (from camera or object movement) and exposure (from camera exposure), using the former to handle fast-motion scenes and using the latter to reconstruct grayscale images for high-quality training and optimization of event-based 3D Gaussian Splatting (3DGS). We introduce a novel integration of 3DGS with exposure events for high-quality reconstruction of explicit scene representations. Our versatile framework can operate on motion events alone for 3D reconstruction, enhance quality using exposure events, or adopt a hybrid mode that balances quality and effectiveness by optimizing with initial exposure events followed by high-speed motion events. We also introduce EME-3D, a real-world 3D dataset with exposure events, motion events, camera calibration parameters, and sparse point clouds. Our method is faster and delivers better reconstruction quality than event-based NeRF while being more cost-effective than NeRF methods that combine event and RGB data by using a single event sensor. By combining motion and exposure events, E-3DGS sets a new benchmark for event-based 3D reconstruction with robust performance in challenging conditions and lower hardware demands. The source code and dataset will be available at https://github.com/MasterHow/E-3DGS.
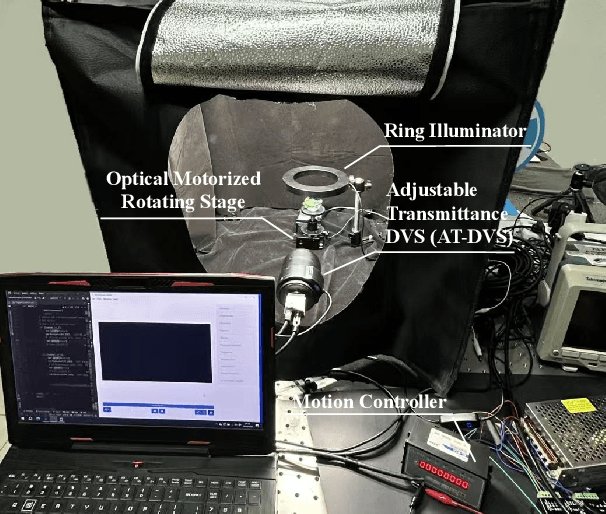
Temporal-Mapping Photography for Event Cameras
Mar 11, 2024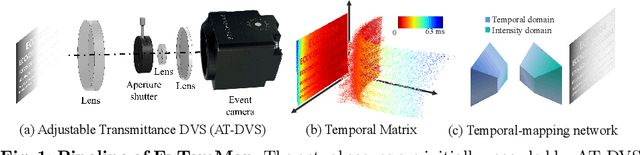



Event cameras, or Dynamic Vision Sensors (DVS) are novel neuromorphic sensors that capture brightness changes as a continuous stream of ``events'' rather than traditional intensity frames. Converting sparse events to dense intensity frames faithfully has long been an ill-posed problem. Previous methods have primarily focused on converting events to video in dynamic scenes or with a moving camera. In this paper, for the first time, we realize events to dense intensity image conversion using a stationary event camera in static scenes. Different from traditional methods that mainly rely on event integration, the proposed Event-Based Temporal Mapping Photography (EvTemMap) measures the time of event emitting for each pixel. Then, the resulting Temporal Matrix is converted to an intensity frame with a temporal mapping neural network. At the hardware level, the proposed EvTemMap is implemented by combining a transmittance adjustment device with a DVS, named Adjustable Transmittance Dynamic Vision Sensor. Additionally, we collected TemMat dataset under various conditions including low-light and high dynamic range scenes. The experimental results showcase the high dynamic range, fine-grained details, and high-grayscale-resolution of the proposed EvTemMap, as well as the enhanced performance on downstream computer vision tasks compared to other methods. The code and TemMat dataset will be made publicly available.
Improving Fast Auto-Focus with Event Polarity
Mar 15, 2023Fast and accurate auto-focus in adverse conditions remains an arduous task. The paper presents a polarity-based event camera auto-focus algorithm featuring high-speed, precise auto-focus in dark, dynamic scenes that conventional frame-based cameras cannot match. Specifically, the symmetrical relationship between the event polarities in focusing is investigated, and the event-based focus evaluation function is proposed based on the principles of the event cameras and the imaging model in the focusing process. Comprehensive experiments on the public EAD dataset show the robustness of the model. Furthermore, precise focus with less than one depth of focus is achieved within 0.004 seconds on our self-built high-speed focusing platform. The dataset and code will be made publicly available.