 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporal-Mapping Photography for Event Cameras
Paper and Code
Mar 11, 2024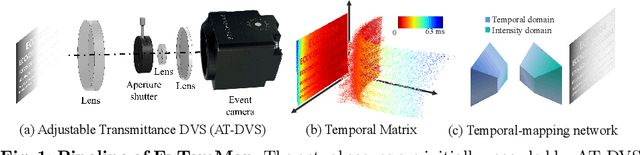



Event cameras, or Dynamic Vision Sensors (DVS) are novel neuromorphic sensors that capture brightness changes as a continuous stream of ``events'' rather than traditional intensity frames. Converting sparse events to dense intensity frames faithfully has long been an ill-posed problem. Previous methods have primarily focused on converting events to video in dynamic scenes or with a moving camera. In this paper, for the first time, we realize events to dense intensity image conversion using a stationary event camera in static scenes. Different from traditional methods that mainly rely on event integration, the proposed Event-Based Temporal Mapping Photography (EvTemMap) measures the time of event emitting for each pixel. Then, the resulting Temporal Matrix is converted to an intensity frame with a temporal mapping neural network. At the hardware level, the proposed EvTemMap is implemented by combining a transmittance adjustment device with a DVS, named Adjustable Transmittance Dynamic Vision Sensor. Additionally, we collected TemMat dataset under various conditions including low-light and high dynamic range scenes. The experimental results showcase the high dynamic range, fine-grained details, and high-grayscale-resolution of the proposed EvTemMap, as well as the enhanced performance on downstream computer vision tasks compared to other methods. The code and TemMat dataset will be made publicly available.