 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Universal Computational Aberration Correction in Photographic Cameras: A Comprehensive Benchmark Analysis
Mar 12, 2026Prevalent Computational Aberration Correction (CAC) methods are typically tailored to specific optical systems, leading to poor generalization and labor-intensive re-training for new lenses. Developing CAC paradigms capable of generalizing across diverse photographic lenses offers a promising solution to these challenges. However, efforts to achieve such cross-lens universality within consumer photography are still in their early stages due to the lack of a comprehensive benchmark that encompasses a sufficiently wide range of optical aberrations. Furthermore, it remains unclear which specific factors influence existing CAC methods and how these factors affect their performance. In this paper, we present comprehensive experiments and evaluations involving 24 image restoration and CAC algorithms, utilizing our newly proposed UniCAC, a large-scale benchmark for photographic cameras constructed via automatic optical design. The Optical Degradation Evaluator (ODE) is introduced as a novel framework to objectively assess the difficulty of CAC tasks, offering credible quantification of optical aberrations and enabling reliable evaluation. Drawing on our comparative analysis, we identify three key factors -- prior utilization, network architecture, and training strategy -- that most significantly influence CAC performance, and further investigate their respective effects. We believe that our benchmark, dataset, and observations contribute foundational insights to related areas and lay the groundwork for future investigations. Benchmarks, codes, and Zemax files will be available at https://github.com/XiaolongQian/UniCAC.
BRIGHT: A Collaborative Generalist-Specialist Foundation Model for Breast Pathology
Mar 03, 2026Generalist pathology foundation models (PFMs), pretrained on large-scale multi-organ datasets, have demonstrated remarkable predictive capabilities across diverse clinical applications. However, their proficiency on the full spectrum of clinically essential tasks within a specific organ system remains an open question due to the lack of large-scale validation cohorts for a single organ as well as the absence of a tailored training paradigm that can effectively translate broad histomorphological knowledge into the organ-specific expertise required for specialist-level interpretation. In this study, we propose BRIGHT, the first PFM specifically designed for breast pathology, trained on approximately 210 million histopathology tiles from over 51,000 breast whole-slide images derived from a cohort of over 40,000 patients across 19 hospitals. BRIGHT employs a collaborative generalist-specialist framework to capture both universal and organ-specific features. To comprehensively evaluate the performance of PFMs on breast oncology, we curate the largest multi-institutional cohorts to date for downstream task development and evaluation, comprising over 25,000 WSIs across 10 hospitals. The validation cohorts cover the full spectrum of breast pathology across 24 distinct clinical tasks spanning diagnosis, biomarker prediction, treatment response and survival prediction. Extensive experiments demonstrate that BRIGHT outperforms three leading generalist PFMs, achieving state-of-the-art (SOTA) performance in 21 of 24 internal validation tasks and in 5 of 10 external validation tasks with excellent heatmap interpretability. By evaluating on large-scale validation cohorts, this study not only demonstrates BRIGHT's clinical utility in breast oncology but also validates a collaborative generalist-specialist paradigm, providing a scalable template for developing PFMs on a specific organ system.
OPTIAGENT: A Physics-Driven Agentic Framework for Automated Optical Design
Feb 27, 2026Optical design is the process of configuring optical elements to precisely manipulate light for high-fidelity imaging. It is inherently a highly non-convex optimization problem that relies heavily on human heuristic expertise and domain-specific knowledge. While Large Language Models (LLMs) possess extensive optical knowledge, their capabilities in leveraging the knowledge in designing lens system remain significantly constrained. This work represents the first attempt to employ LLMs in the field of optical design. We bridge the expertise gap by enabling users without formal optical training to successfully develop functional lens systems. Concretely, we curate a comprehensive dataset, named OptiDesignQA, which encompasses both classical lens systems sourced from standard optical textbooks and novel configurations generated by automated design algorithms for training and evaluation. Furthermore, we inject domain-specific optical expertise into the LLM through a hybrid objective of full-system synthesis and lens completion. To align the model with optical principles, we employ Group Relative Policy Optimization Done Right (DrGRPO) guided by Optical Lexicographic Reward for physics-driven policy alignment. This reward system incorporates structural format rewards, physical feasibility rewards, light-manipulation accuracy, and LLM-based heuristics. Finally, our model integrates with specialized optical optimization routines for end-to-end fine-tuning and precision refinement. We benchmark our proposed method against both traditional optimization-based automated design algorithms and LLM counterparts, and experimental results show the superiority of our method.
Towards Single-Lens Controllable Depth-of-Field Imaging via All-in-Focus Aberration Correction and Monocular Depth Estimation
Sep 15, 2024



Controllable Depth-of-Field (DoF) imaging commonly produces amazing visual effects based on heavy and expensive high-end lenses. However, confronted with the increasing demand for mobile scenarios, it is desirable to achieve a lightweight solution with Minimalist Optical Systems (MOS). This work centers around two major limitations of MOS, i.e., the severe optical aberrations and uncontrollable DoF, for achieving single-lens controllable DoF imaging via computational methods. A Depth-aware Controllable DoF Imaging (DCDI) framework is proposed equipped with All-in-Focus (AiF) aberration correction and monocular depth estimation, where the recovered image and corresponding depth map are utilized to produce imaging results under diverse DoFs of any high-end lens via patch-wise convolution. To address the depth-varying optical degradation, we introduce a Depth-aware Degradation-adaptive Training (DA2T) scheme. At the dataset level, a Depth-aware Aberration MOS (DAMOS) dataset is established based on the simulation of Point Spread Functions (PSFs) under different object distances. Additionally, we design two plug-and-play depth-aware mechanisms to embed depth information into the aberration image recovery for better tackling depth-aware degradation. Furthermore, we propose a storage-efficient Omni-Lens-Field model to represent the 4D PSF library of various lenses. With the predicted depth map, recovered image, and depth-aware PSF map inferred by Omni-Lens-Field, single-lens controllable DoF imaging is achieved. Comprehensive experimental results demonstrate that the proposed framework enhances the recovery performance, and attains impressive single-lens controllable DoF imaging results, providing a seminal baseline for this field. The source code and the established dataset will be publicly available at https://github.com/XiaolongQian/DCDI.
Real-World Computational Aberration Correction via Quantized Domain-Mixing Representation
Mar 15, 2024Relying on paired synthetic data, existing learning-based Computational Aberration Correction (CAC) methods are confronted with the intricate and multifaceted synthetic-to-real domain gap, which leads to suboptimal performance in real-world applications. In this paper, in contrast to improving the simulation pipeline, we deliver a novel insight into real-world CAC from the perspective of Unsupervised Domain Adaptation (UDA). By incorporating readily accessible unpaired real-world data into training, we formalize the Domain Adaptive CAC (DACAC) task, and then introduce a comprehensive Real-world aberrated images (Realab) dataset to benchmark it. The setup task presents a formidable challenge due to the intricacy of understanding the target aberration domain. To this intent, we propose a novel Quntized Domain-Mixing Representation (QDMR) framework as a potent solution to the issue. QDMR adapts the CAC model to the target domain from three key aspects: (1) reconstructing aberrated images of both domains by a VQGAN to learn a Domain-Mixing Codebook (DMC) which characterizes the degradation-aware priors; (2) modulating the deep features in CAC model with DMC to transfer the target domain knowledge; and (3) leveraging the trained VQGAN to generate pseudo target aberrated images from the source ones for convincing target domain supervision. Extensive experiments on both synthetic and real-world benchmarks reveal that the models with QDMR consistently surpass the competitive methods in mitigating the synthetic-to-real gap, which produces visually pleasant real-world CAC results with fewer artifacts. Codes and datasets will be made publicly available.
FR-LIO: Fast and Robust Lidar-Inertial Odometry by Tightly-Coupled Iterated Kalman Smoother and Robocentric Voxels
Feb 08, 2023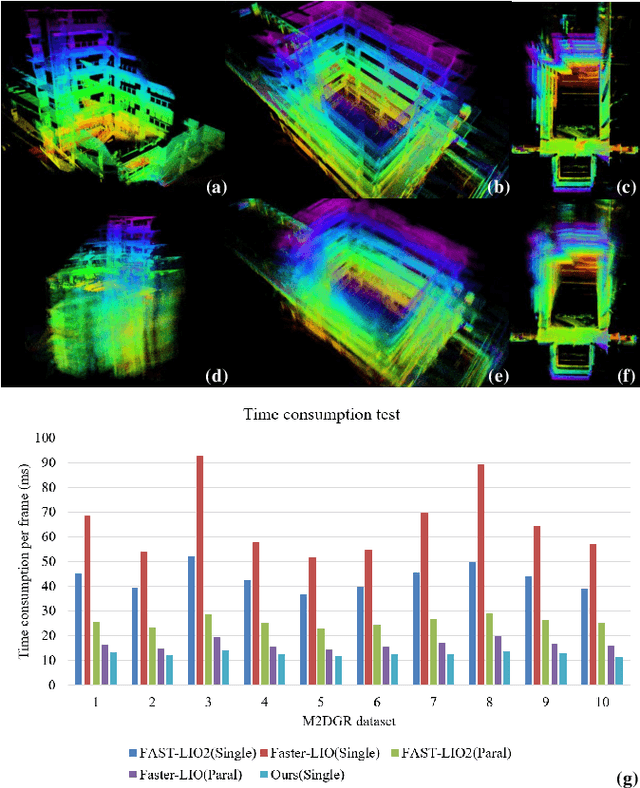
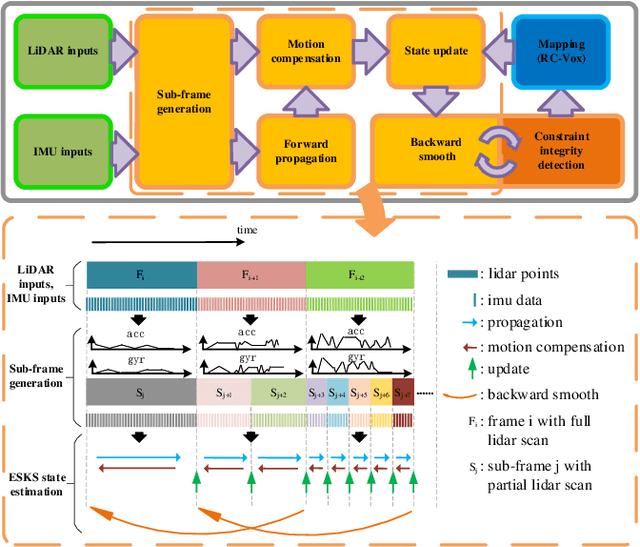
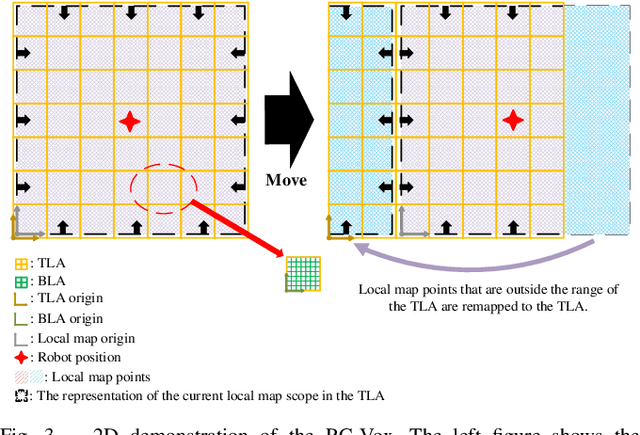
This paper presents a fast lidar-inertial odometry (LIO) system that is robust to aggressive motion. To achieve robust tracking in aggressive motion scenes, we exploit the continuous scanning property of lidar to adaptively divide the full scan into multiple partial scans (named sub-frames) according to the motion intensity. And to avoid the degradation of sub-frames resulting from insufficient constraints, we propose a robust state estimation method based on a tightly-coupled iterated error state Kalman smoother (ESKS) framework. Furthermore, we propose a robocentric voxel map (RC-Vox) to improve the system's efficiency. The RC-Vox allows efficient maintenance of map points and k nearest neighbor (k-NN) queries by mapping local map points into a fixed-size, two-layer 3D array structure. Extensive experiments were conducted on 27 sequences from 4 public datasets and our own dataset. The results show that our system can achieve stable tracking in aggressive motion scenes that cannot be handled by other state-of-the-art methods, while our system can achieve competitive performance with these methods in general scenes. In terms of efficiency, the RC-Vox allows our system to achieve the fastest speed compared with the current advanced LIO systems.