 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFR-LIO: Fast and Robust Lidar-Inertial Odometry by Tightly-Coupled Iterated Kalman Smoother and Robocentric Voxels
Paper and Code
Feb 08, 2023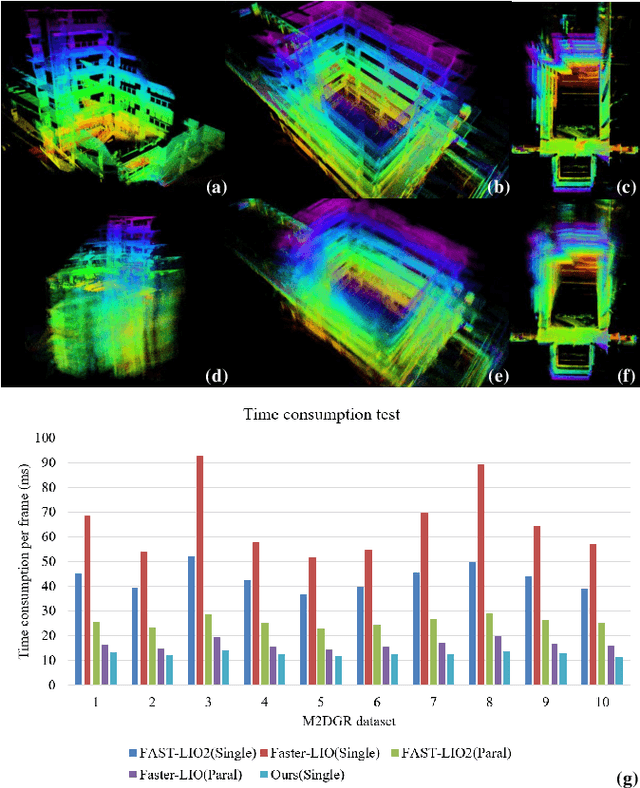
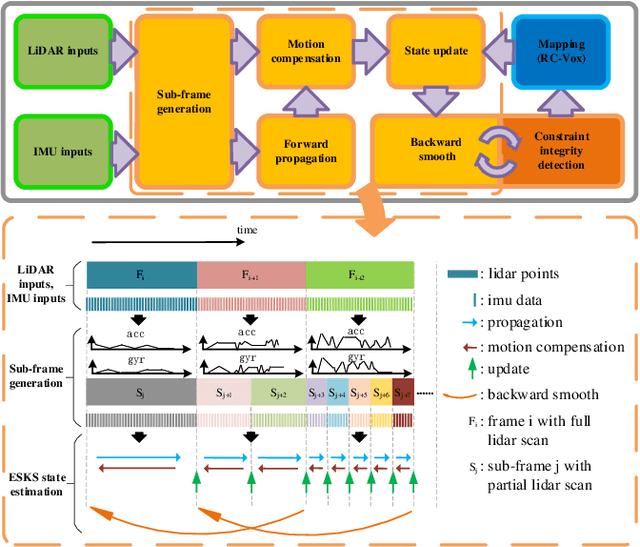
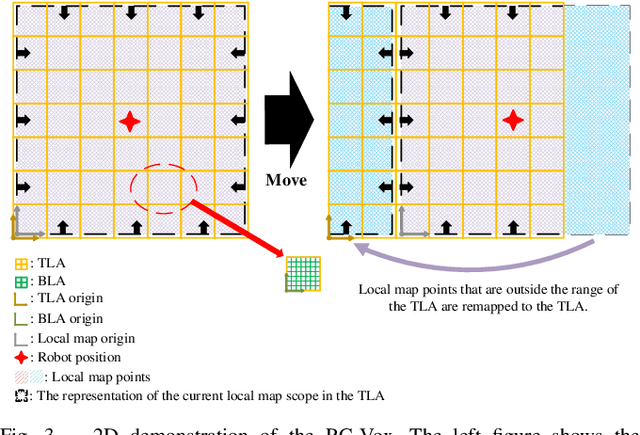
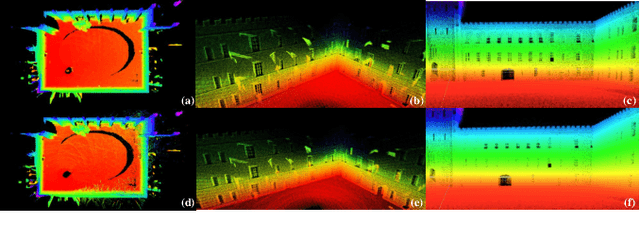
This paper presents a fast lidar-inertial odometry (LIO) system that is robust to aggressive motion. To achieve robust tracking in aggressive motion scenes, we exploit the continuous scanning property of lidar to adaptively divide the full scan into multiple partial scans (named sub-frames) according to the motion intensity. And to avoid the degradation of sub-frames resulting from insufficient constraints, we propose a robust state estimation method based on a tightly-coupled iterated error state Kalman smoother (ESKS) framework. Furthermore, we propose a robocentric voxel map (RC-Vox) to improve the system's efficiency. The RC-Vox allows efficient maintenance of map points and k nearest neighbor (k-NN) queries by mapping local map points into a fixed-size, two-layer 3D array structure. Extensive experiments were conducted on 27 sequences from 4 public datasets and our own dataset. The results show that our system can achieve stable tracking in aggressive motion scenes that cannot be handled by other state-of-the-art methods, while our system can achieve competitive performance with these methods in general scenes. In terms of efficiency, the RC-Vox allows our system to achieve the fastest speed compared with the current advanced LIO systems.