 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRadarMP: Motion Perception for 4D mmWave Radar in Autonomous Driving
Nov 15, 2025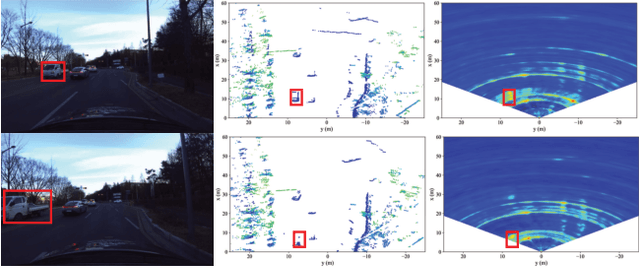
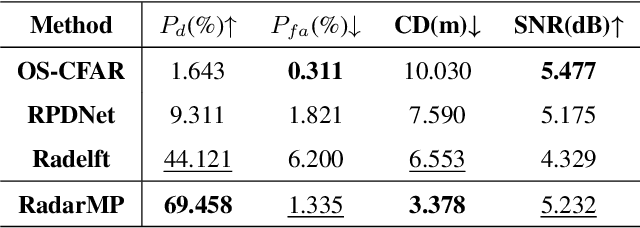
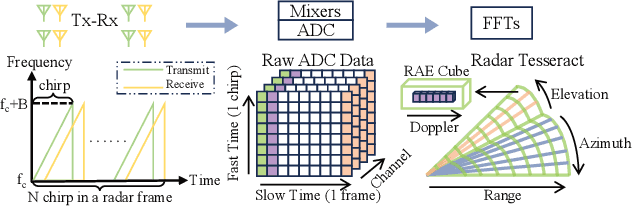
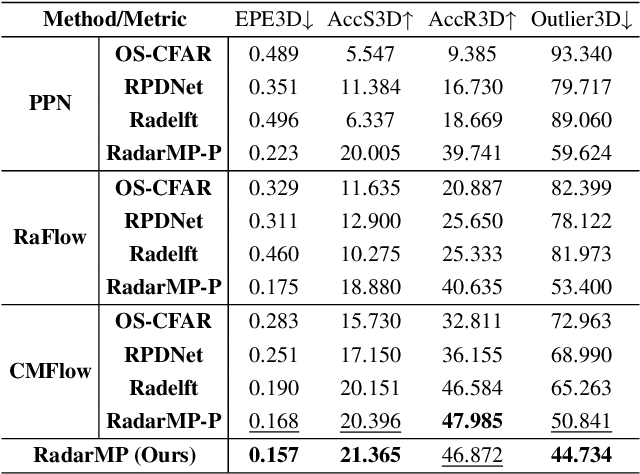
Accurate 3D scene motion perception significantly enhances the safety and reliability of an autonomous driving system. Benefiting from its all-weather operational capability and unique perceptual properties, 4D mmWave radar has emerged as an essential component in advanced autonomous driving. However, sparse and noisy radar points often lead to imprecise motion perception, leaving autonomous vehicles with limited sensing capabilities when optical sensors degrade under adverse weather conditions. In this paper, we propose RadarMP, a novel method for precise 3D scene motion perception using low-level radar echo signals from two consecutive frames. Unlike existing methods that separate radar target detection and motion estimation, RadarMP jointly models both tasks in a unified architecture, enabling consistent radar point cloud generation and pointwise 3D scene flow prediction. Tailored to radar characteristics, we design specialized self-supervised loss functions guided by Doppler shifts and echo intensity, effectively supervising spatial and motion consistency without explicit annotations. Extensive experiments on the public dataset demonstrate that RadarMP achieves reliable motion perception across diverse weather and illumination conditions, outperforming radar-based decoupled motion perception pipelines and enhancing perception capabilities for full-scenario autonomous driving systems.
OpenMPR: Recognize Places Using Multimodal Data for People with Visual Impairments
Sep 15, 2019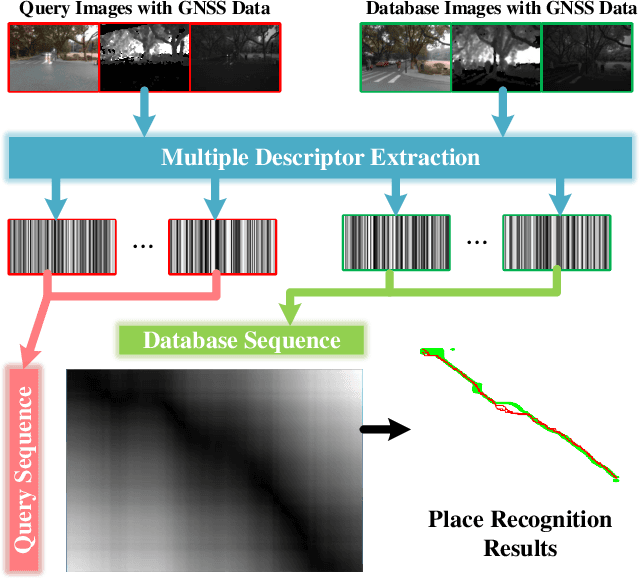
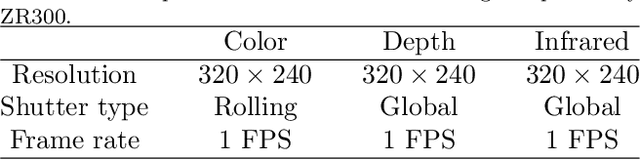
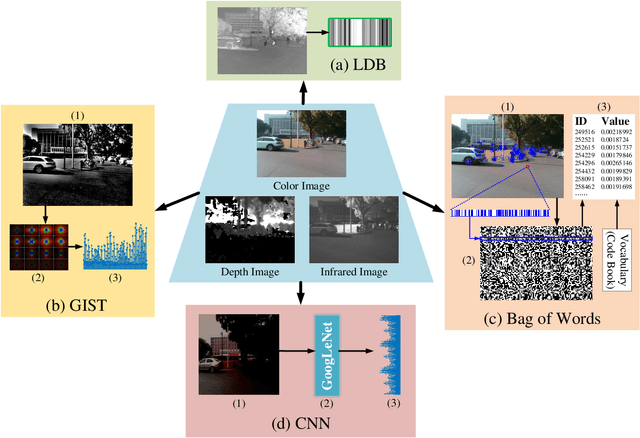

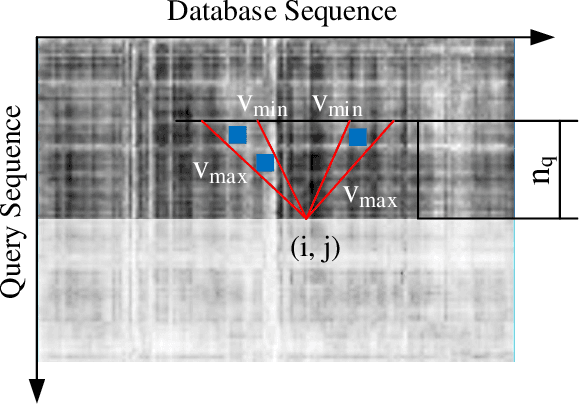
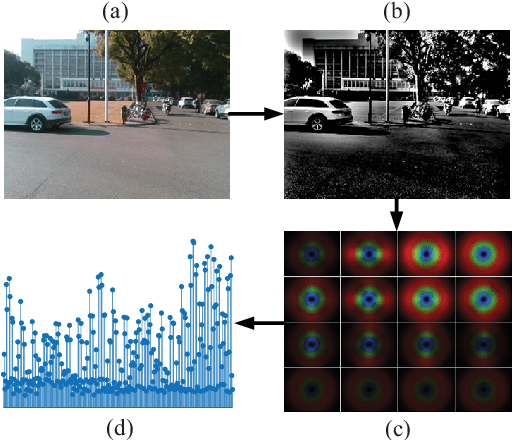
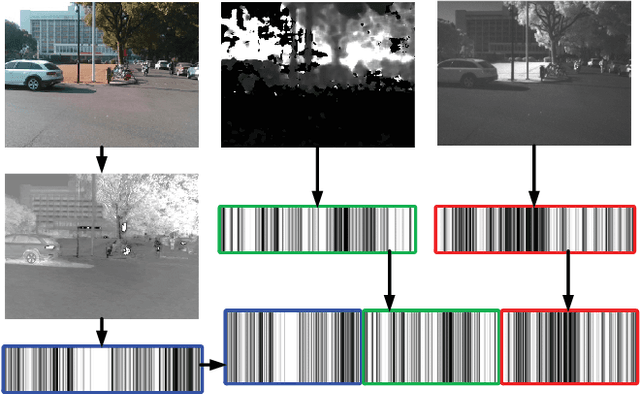
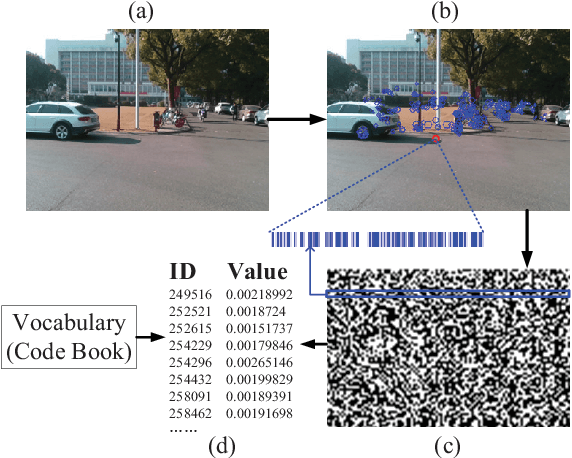
Place recognition plays a crucial role in navigational assistance, and is also a challenging issue of assistive technology. The place recognition is prone to erroneous localization owing to various changes between database and query images. Aiming at the wearable assistive device for visually impaired people, we propose an open-sourced place recognition algorithm OpenMPR, which utilizes the multimodal data to address the challenging issues of place recognition. Compared with conventional place recognition, the proposed OpenMPR not only leverages multiple effective descriptors, but also assigns different weights to those descriptors in image matching. Incorporating GNSS data into the algorithm, the cone-based sequence searching is used for robust place recognition. The experiments illustrate that the proposed algorithm manages to solve the place recognition issue in the real-world scenarios and surpass the state-of-the-art algorithms in terms of assistive navigation performance. On the real-world testing dataset, the online OpenMPR achieves 88.7% precision at 100% recall without illumination changes, and achieves 57.8% precision at 99.3% recall with illumination changes. The OpenMPR is available at https://github.com/chengricky/OpenMultiPR.
Panoramic Annular Localizer: Tackling the Variation Challenges of Outdoor Localization Using Panoramic Annular Images and Active Deep Descriptors
May 14, 2019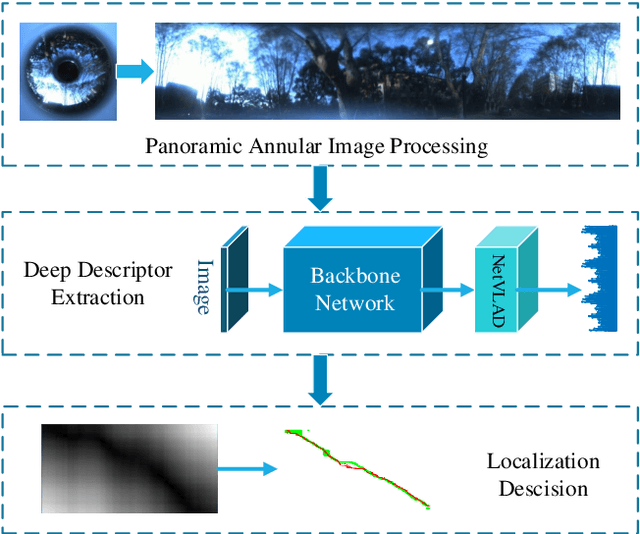
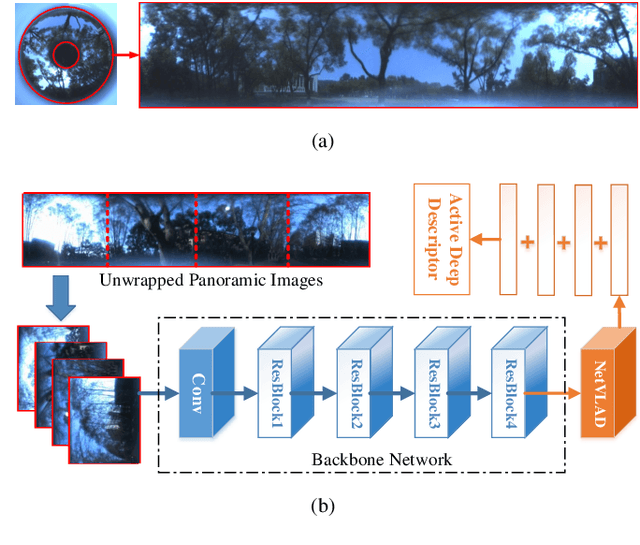
Visual localization is an attractive problem that estimates the camera localization from database images based on the query image. It is a crucial task for various applications, such as autonomous vehicles, assistive navigation and augmented reality. The challenging issues of the task lie in various appearance variations between query and database images, including illumination variations, season variations, dynamic object variations and viewpoint variations. In order to tackle those challenges, Panoramic Annular Localizer into which panoramic annular lens and robust deep image descriptors are incorporated is proposed in this paper. The panoramic annular images captured by the single camera are processed and fed into the NetVLAD network to form the active deep descriptor, and sequential matching is utilized to generate the localization result. The experiments carried on the public datasets and in the field illustrate the validation of the proposed system.
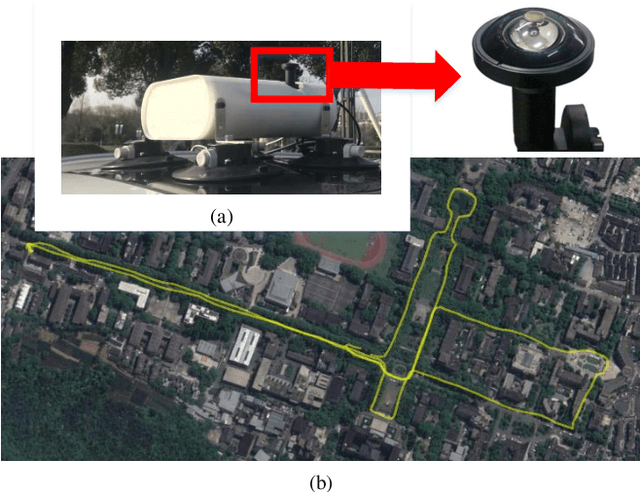
Visual Localization of Key Positions for Visually Impaired People
Oct 09, 2018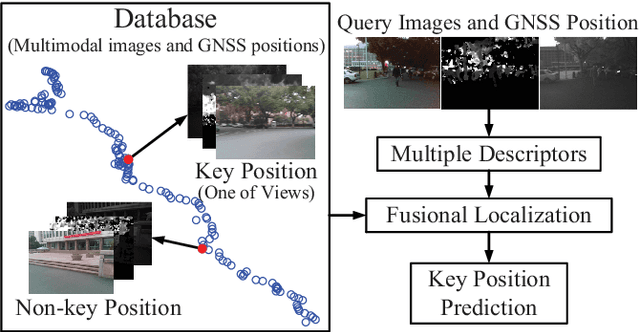
On the off-the-shelf navigational assistance devices, the localization precision is limited to the signal error of global navigation satellite system (GNSS). During travelling outdoors, the inaccurately localization perplexes visually impaired people, especially at key positions, such as gates, bus stations or intersections. The visual localization is a feasible approach to improving the positioning precision of assistive devices. Using multiple image descriptors, the paper proposes a robust and efficient visual localization algorithm, which takes advantage of priori GNSS signals and multi-modal images to achieve the accurate localization of key positions. In the experiments, we implement the approach on the wearable system and test the performance of visual localization under practical scenarios.