 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHS-ResNet: Hierarchical-Split Block on Convolutional Neural Network
Oct 15, 2020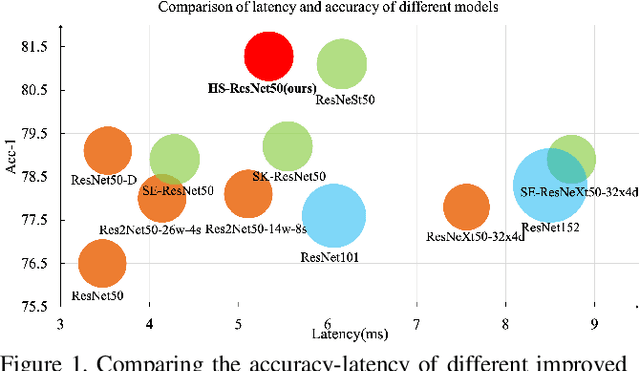
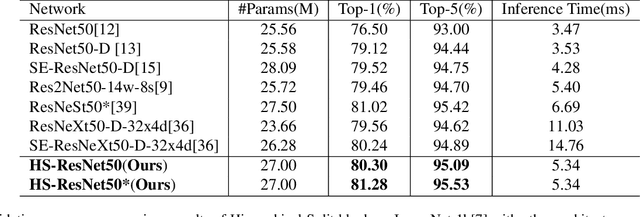
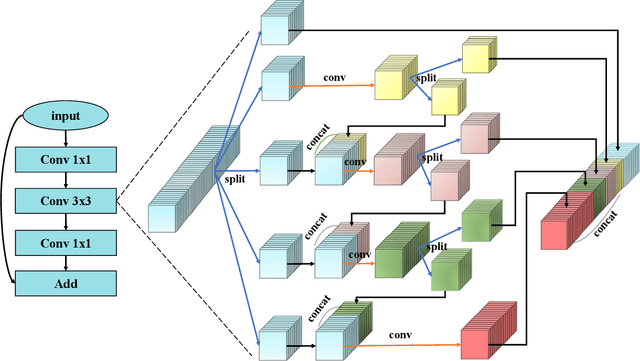
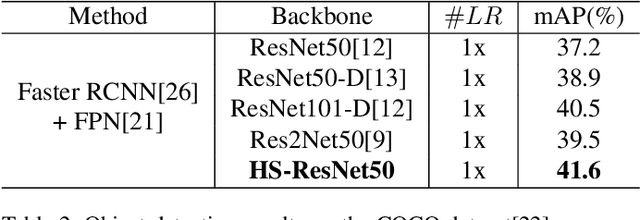
This paper addresses representational block named Hierarchical-Split Block, which can be taken as a plug-and-play block to upgrade existing convolutional neural networks, improves model performance significantly in a network. Hierarchical-Split Block contains many hierarchical split and concatenate connections within one single residual block. We find multi-scale features is of great importance for numerous vision tasks. Moreover, Hierarchical-Split block is very flexible and efficient, which provides a large space of potential network architectures for different applications. In this work, we present a common backbone based on Hierarchical-Split block for tasks: image classification, object detection, instance segmentation and semantic image segmentation/parsing. Our approach shows significant improvements over all these core tasks in comparison with the baseline. As shown in Figure1, for image classification, our 50-layers network(HS-ResNet50) achieves 81.28% top-1 accuracy with competitive latency on ImageNet-1k dataset. It also outperforms most state-of-the-art models. The source code and models will be available on: https://github.com/PaddlePaddle/PaddleClas
Panoramic Annular Localizer: Tackling the Variation Challenges of Outdoor Localization Using Panoramic Annular Images and Active Deep Descriptors
May 14, 2019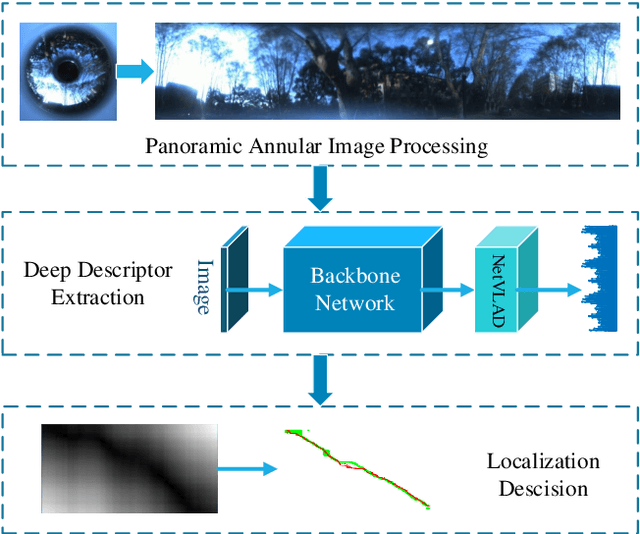
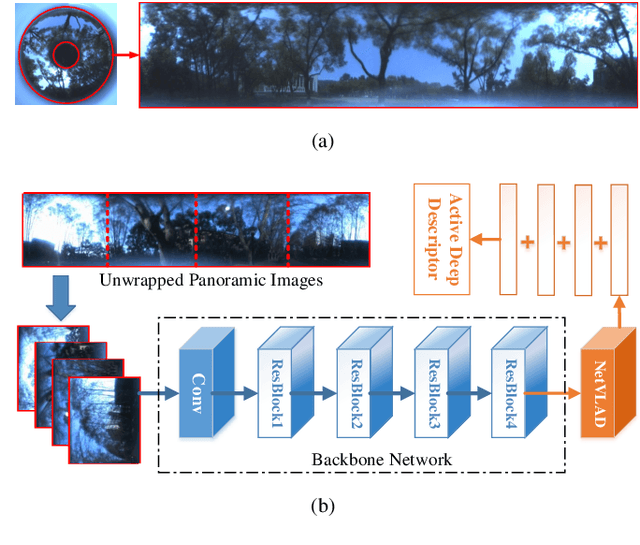
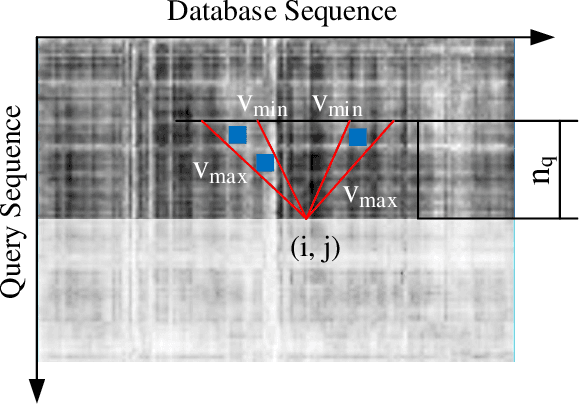
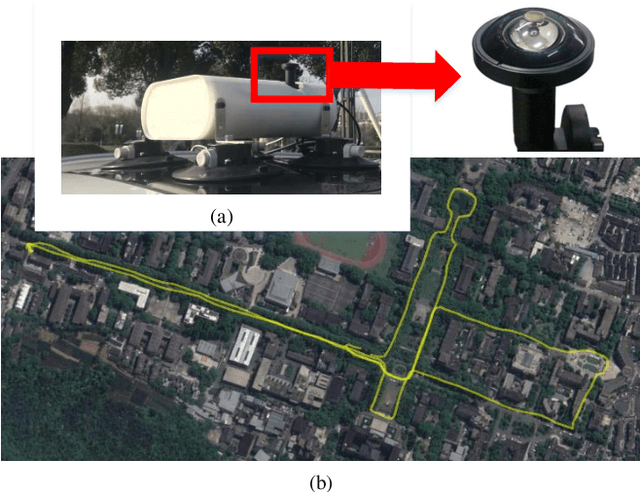
Visual localization is an attractive problem that estimates the camera localization from database images based on the query image. It is a crucial task for various applications, such as autonomous vehicles, assistive navigation and augmented reality. The challenging issues of the task lie in various appearance variations between query and database images, including illumination variations, season variations, dynamic object variations and viewpoint variations. In order to tackle those challenges, Panoramic Annular Localizer into which panoramic annular lens and robust deep image descriptors are incorporated is proposed in this paper. The panoramic annular images captured by the single camera are processed and fed into the NetVLAD network to form the active deep descriptor, and sequential matching is utilized to generate the localization result. The experiments carried on the public datasets and in the field illustrate the validation of the proposed system.