 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePanoramic Annular Localizer: Tackling the Variation Challenges of Outdoor Localization Using Panoramic Annular Images and Active Deep Descriptors
May 14, 2019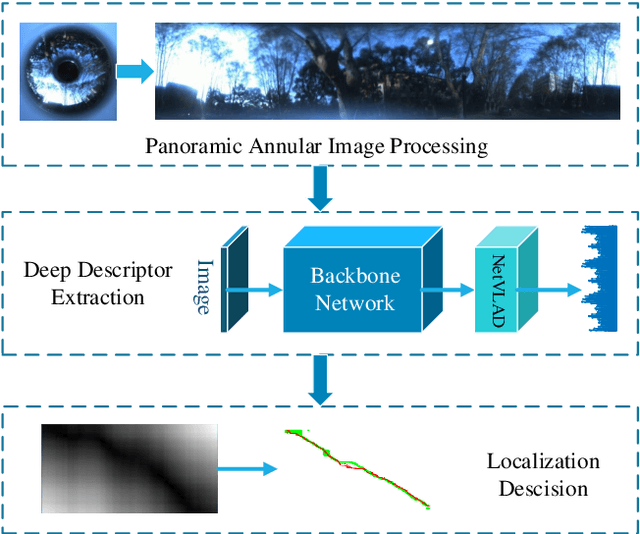
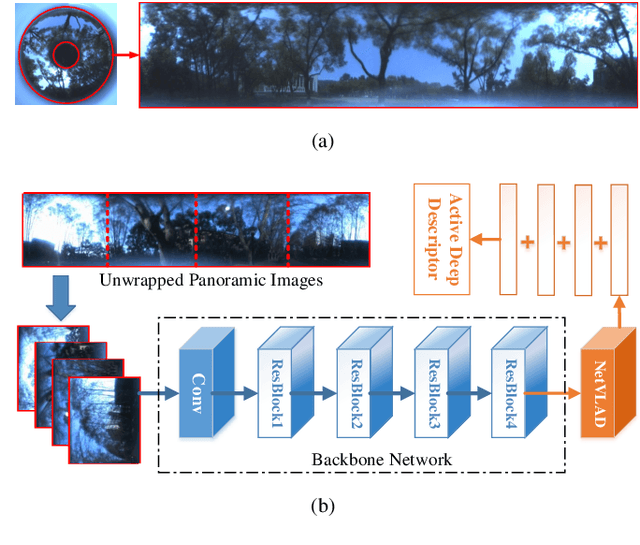
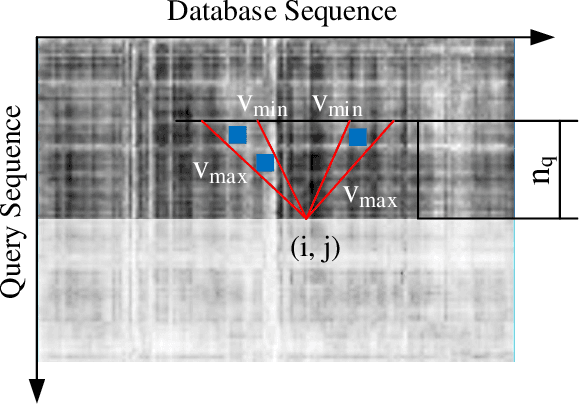
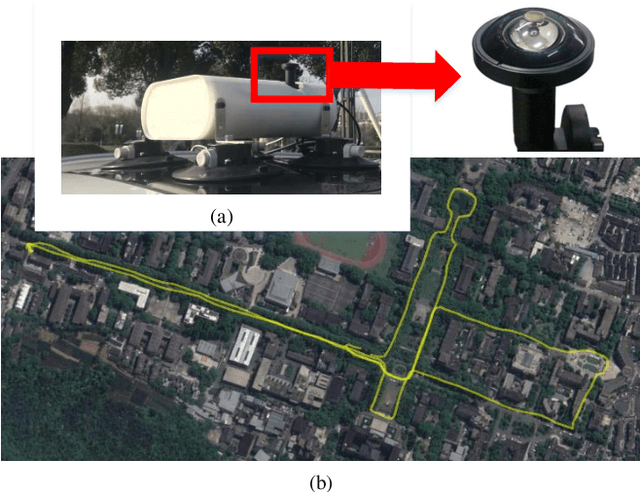
Visual localization is an attractive problem that estimates the camera localization from database images based on the query image. It is a crucial task for various applications, such as autonomous vehicles, assistive navigation and augmented reality. The challenging issues of the task lie in various appearance variations between query and database images, including illumination variations, season variations, dynamic object variations and viewpoint variations. In order to tackle those challenges, Panoramic Annular Localizer into which panoramic annular lens and robust deep image descriptors are incorporated is proposed in this paper. The panoramic annular images captured by the single camera are processed and fed into the NetVLAD network to form the active deep descriptor, and sequential matching is utilized to generate the localization result. The experiments carried on the public datasets and in the field illustrate the validation of the proposed system.