 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Segmentation of Panoramic Images Using a Synthetic Dataset
Sep 02, 2019



Panoramic images have advantages in information capacity and scene stability due to their large field of view (FoV). In this paper, we propose a method to synthesize a new dataset of panoramic image. We managed to stitch the images taken from different directions into panoramic images, together with their labeled images, to yield the panoramic semantic segmentation dataset denominated as SYNTHIA-PANO. For the purpose of finding out the effect of using panoramic images as training dataset, we designed and performed a comprehensive set of experiments. Experimental results show that using panoramic images as training data is beneficial to the segmentation result. In addition, it has been shown that by using panoramic images with a 180 degree FoV as training data the model has better performance. Furthermore, the model trained with panoramic images also has a better capacity to resist the image distortion.
A Multimodal Vision Sensor for Autonomous Driving
Aug 15, 2019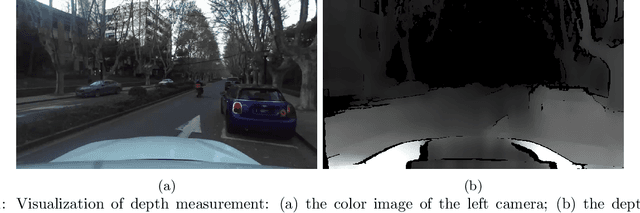

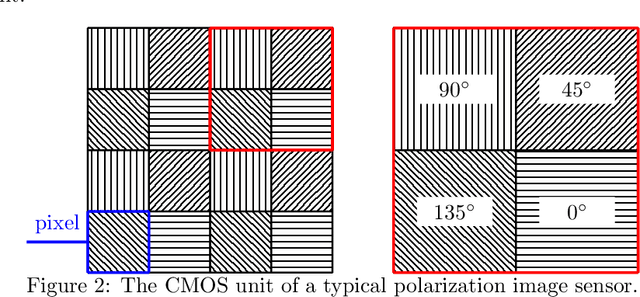

This paper describes a multimodal vision sensor that integrates three types of cameras, including a stereo camera, a polarization camera and a panoramic camera. Each sensor provides a specific dimension of information: the stereo camera measures depth per pixel, the polarization obtains the degree of polarization, and the panoramic camera captures a 360-degree landscape. Data fusion and advanced environment perception could be built upon the combination of sensors. Designed especially for autonomous driving, this vision sensor is shipped with a robust semantic segmentation network. In addition, we demonstrate how cross-modal enhancement could be achieved by registering the color image and the polarization image. An example of water hazard detection is given. To prove the multimodal vision sensor's compatibility with different devices, a brief runtime performance analysis is carried out.
Panoramic Annular Localizer: Tackling the Variation Challenges of Outdoor Localization Using Panoramic Annular Images and Active Deep Descriptors
May 14, 2019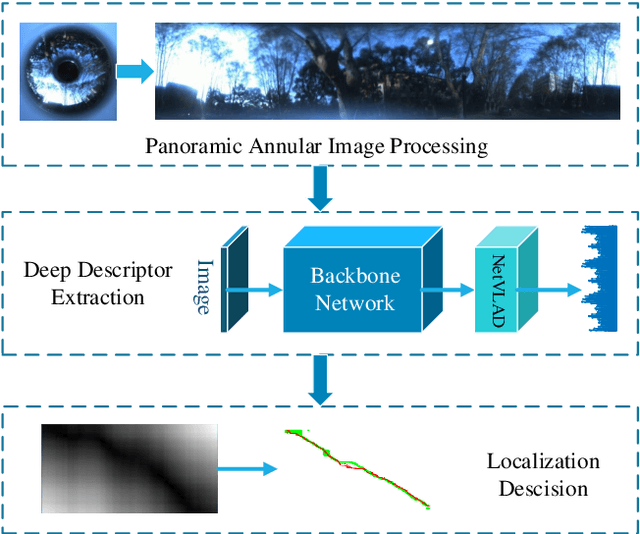
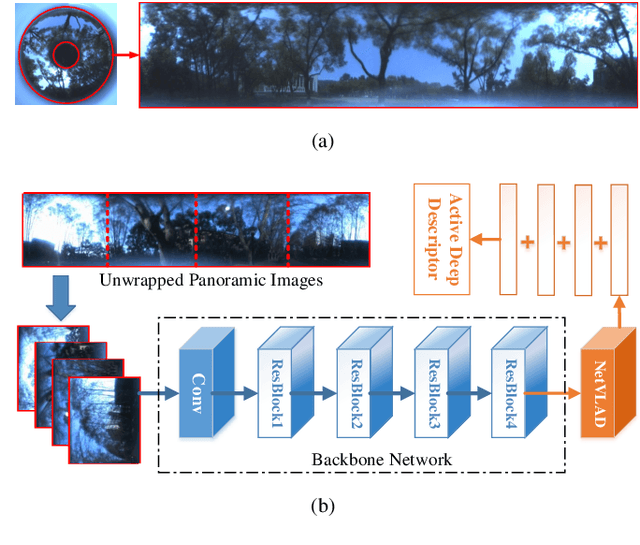
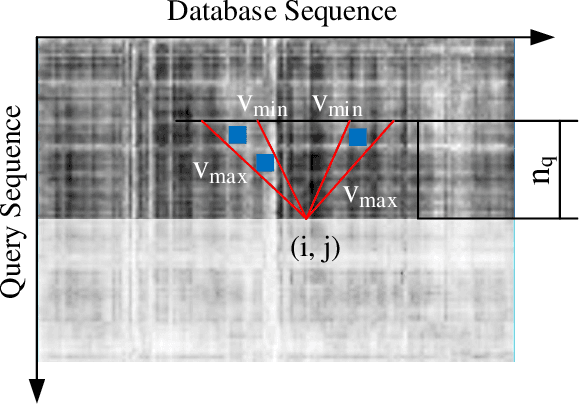
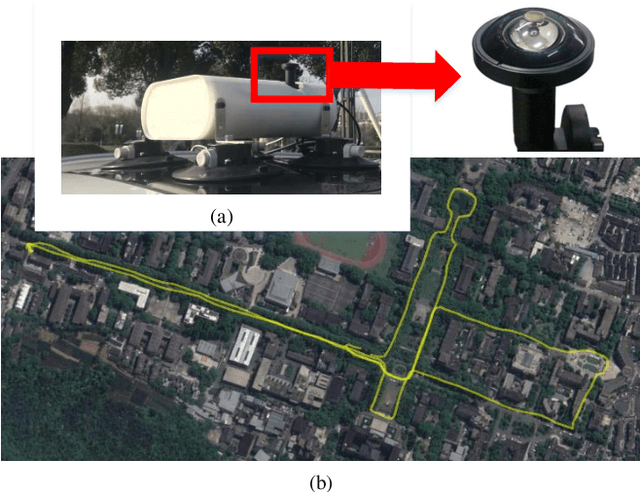
Visual localization is an attractive problem that estimates the camera localization from database images based on the query image. It is a crucial task for various applications, such as autonomous vehicles, assistive navigation and augmented reality. The challenging issues of the task lie in various appearance variations between query and database images, including illumination variations, season variations, dynamic object variations and viewpoint variations. In order to tackle those challenges, Panoramic Annular Localizer into which panoramic annular lens and robust deep image descriptors are incorporated is proposed in this paper. The panoramic annular images captured by the single camera are processed and fed into the NetVLAD network to form the active deep descriptor, and sequential matching is utilized to generate the localization result. The experiments carried on the public datasets and in the field illustrate the validation of the proposed system.