 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApple Intelligence Foundation Language Models
Jul 29, 2024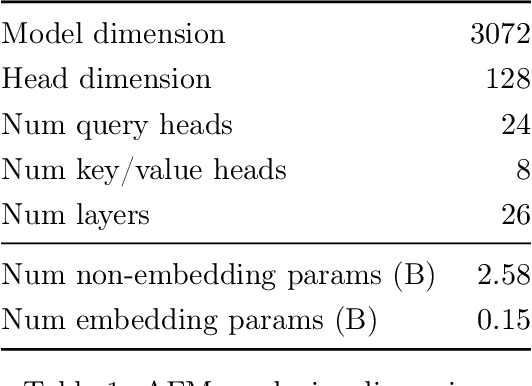
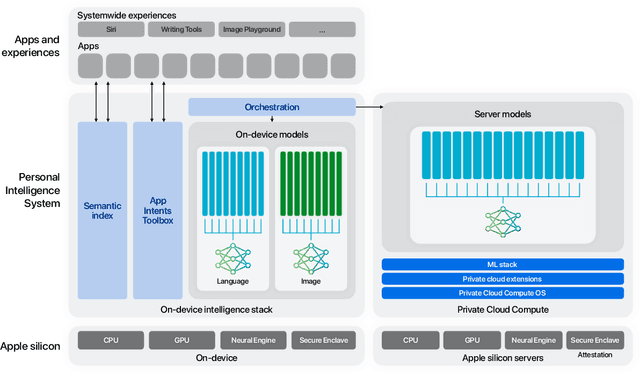

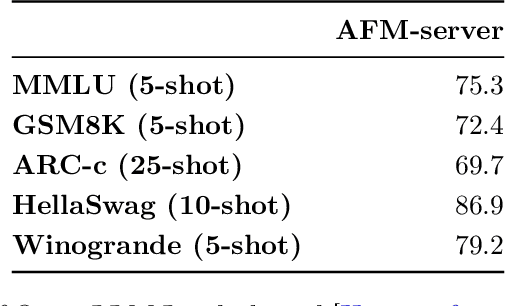
We present foundation language models developed to power Apple Intelligence features, including a ~3 billion parameter model designed to run efficiently on devices and a large server-based language model designed for Private Cloud Compute. These models are designed to perform a wide range of tasks efficiently, accurately, and responsibly. This report describes the model architecture, the data used to train the model, the training process, how the models are optimized for inference, and the evaluation results. We highlight our focus on Responsible AI and how the principles are applied throughout the model development.
Open-Vocabulary Temporal Action Detection with Off-the-Shelf Image-Text Features
Dec 20, 2022
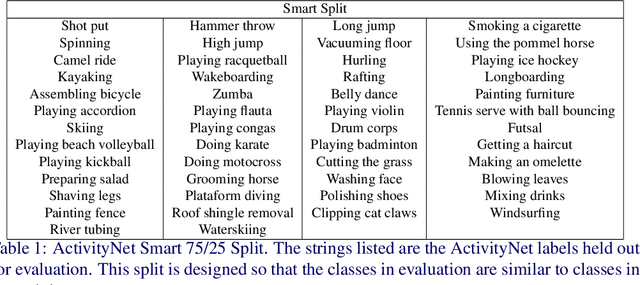


Detecting actions in untrimmed videos should not be limited to a small, closed set of classes. We present a simple, yet effective strategy for open-vocabulary temporal action detection utilizing pretrained image-text co-embeddings. Despite being trained on static images rather than videos, we show that image-text co-embeddings enable openvocabulary performance competitive with fully-supervised models. We show that the performance can be further improved by ensembling the image-text features with features encoding local motion, like optical flow based features, or other modalities, like audio. In addition, we propose a more reasonable open-vocabulary evaluation setting for the ActivityNet data set, where the category splits are based on similarity rather than random assignment.
The surprising impact of mask-head architecture on novel class segmentation
Apr 01, 2021
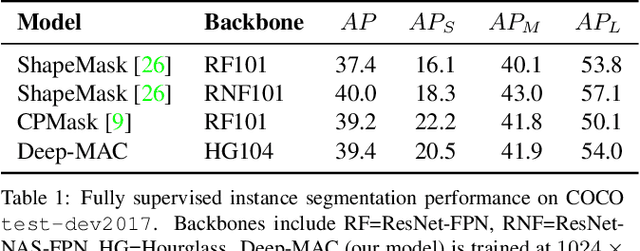
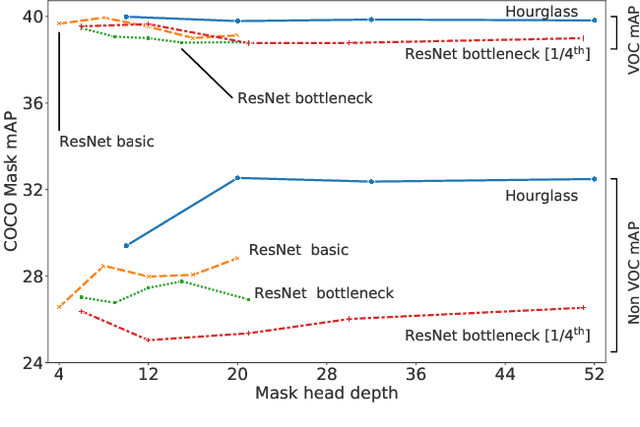
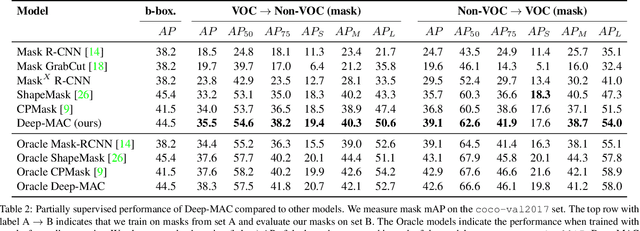
Instance segmentation models today are very accurate when trained on large annotated datasets, but collecting mask annotations at scale is prohibitively expensive. We address the partially supervised instance segmentation problem in which one can train on (significantly cheaper) bounding boxes for all categories but use masks only for a subset of categories. In this work, we focus on a popular family of models which apply differentiable cropping to a feature map and predict a mask based on the resulting crop. Within this family, we show that the architecture of the mask-head plays a surprisingly important role in generalization to classes for which we do not observe masks during training. While many architectures perform similarly when trained in fully supervised mode, we show that they often generalize to novel classes in dramatically different ways. We call this phenomenon the strong mask generalization effect, which we exploit by replacing the typical mask-head of 2-4 layers with significantly deeper off-the-shelf architectures (e.g. ResNet, Hourglass models). We also show that the choice of mask-head architecture alone can lead to SOTA results on the partially supervised COCO benchmark without the need of specialty modules or losses proposed by prior literature. Finally, we demonstrate that our effect is general, holding across underlying detection methodologies, (e.g. both anchor-based or anchor free or no detector at all) and across different backbone networks. Code and pre-trained models are available at https://git.io/deepmac.
DOPS: Learning to Detect 3D Objects and Predict their 3D Shapes
Apr 07, 2020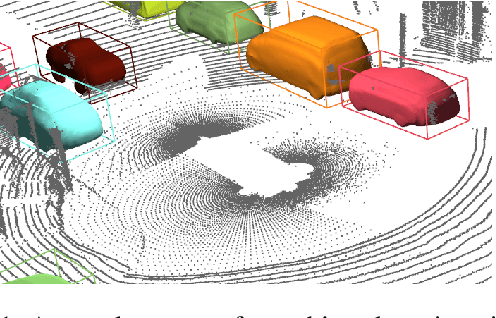
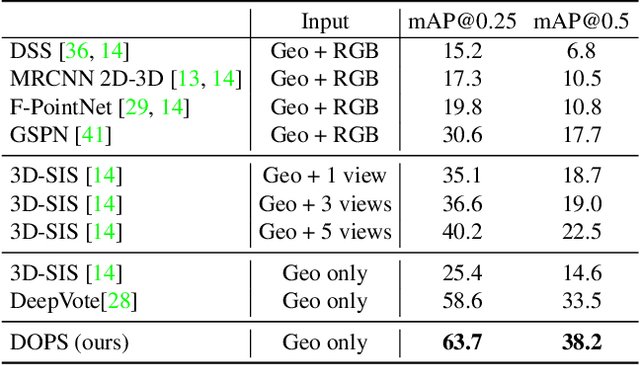
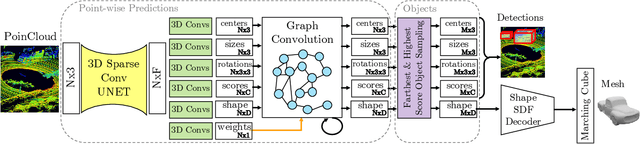
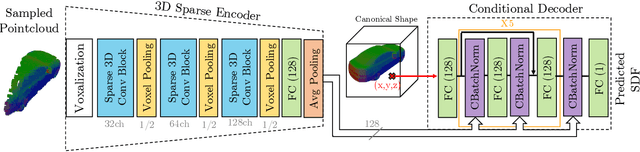
We propose DOPS, a fast single-stage 3D object detection method for LIDAR data. Previous methods often make domain-specific design decisions, for example projecting points into a bird-eye view image in autonomous driving scenarios. In contrast, we propose a general-purpose method that works on both indoor and outdoor scenes. The core novelty of our method is a fast, single-pass architecture that both detects objects in 3D and estimates their shapes. 3D bounding box parameters are estimated in one pass for every point, aggregated through graph convolutions, and fed into a branch of the network that predicts latent codes representing the shape of each detected object. The latent shape space and shape decoder are learned on a synthetic dataset and then used as supervision for the end-to-end training of the 3D object detection pipeline. Thus our model is able to extract shapes without access to ground-truth shape information in the target dataset. During experiments, we find that our proposed method achieves state-of-the-art results by ~5% on object detection in ScanNet scenes, and it gets top results by 3.4% in the Waymo Open Dataset, while reproducing the shapes of detected cars.
RetinaTrack: Online Single Stage Joint Detection and Tracking
Mar 30, 2020
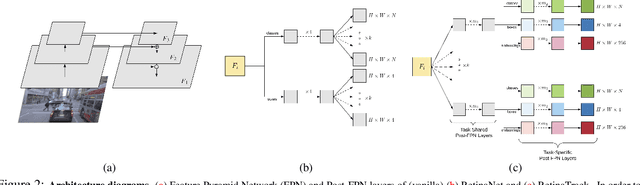
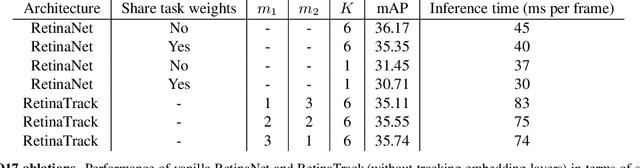
Traditionally multi-object tracking and object detection are performed using separate systems with most prior works focusing exclusively on one of these aspects over the other. Tracking systems clearly benefit from having access to accurate detections, however and there is ample evidence in literature that detectors can benefit from tracking which, for example, can help to smooth predictions over time. In this paper we focus on the tracking-by-detection paradigm for autonomous driving where both tasks are mission critical. We propose a conceptually simple and efficient joint model of detection and tracking, called RetinaTrack, which modifies the popular single stage RetinaNet approach such that it is amenable to instance-level embedding training. We show, via evaluations on the Waymo Open Dataset, that we outperform a recent state of the art tracking algorithm while requiring significantly less computation. We believe that our simple yet effective approach can serve as a strong baseline for future work in this area.
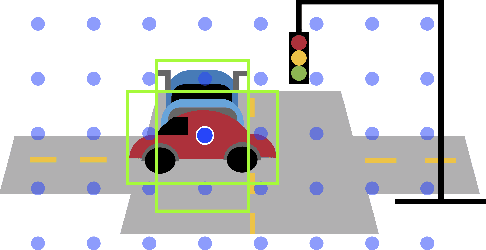
Long Term Temporal Context for Per-Camera Object Detection
Dec 07, 2019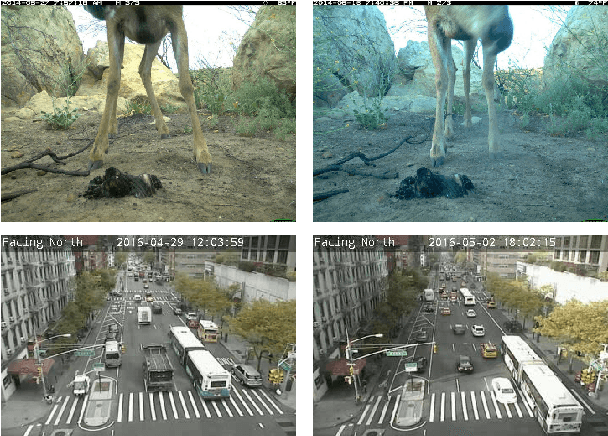
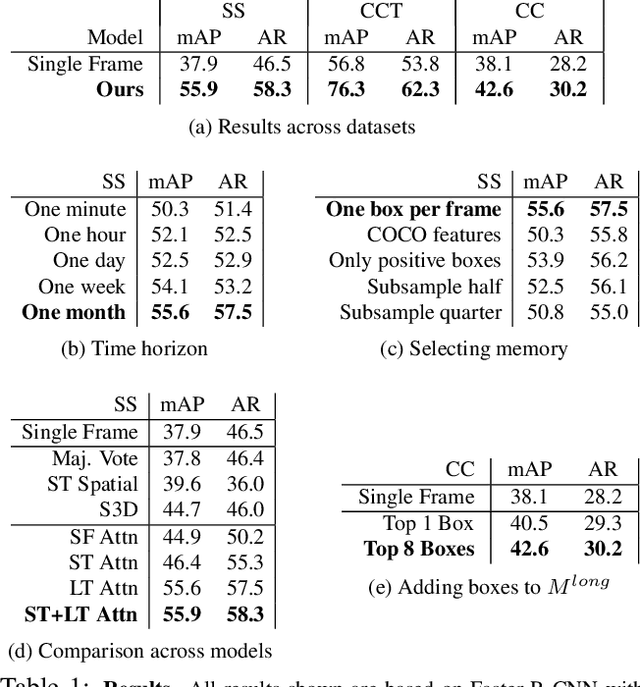
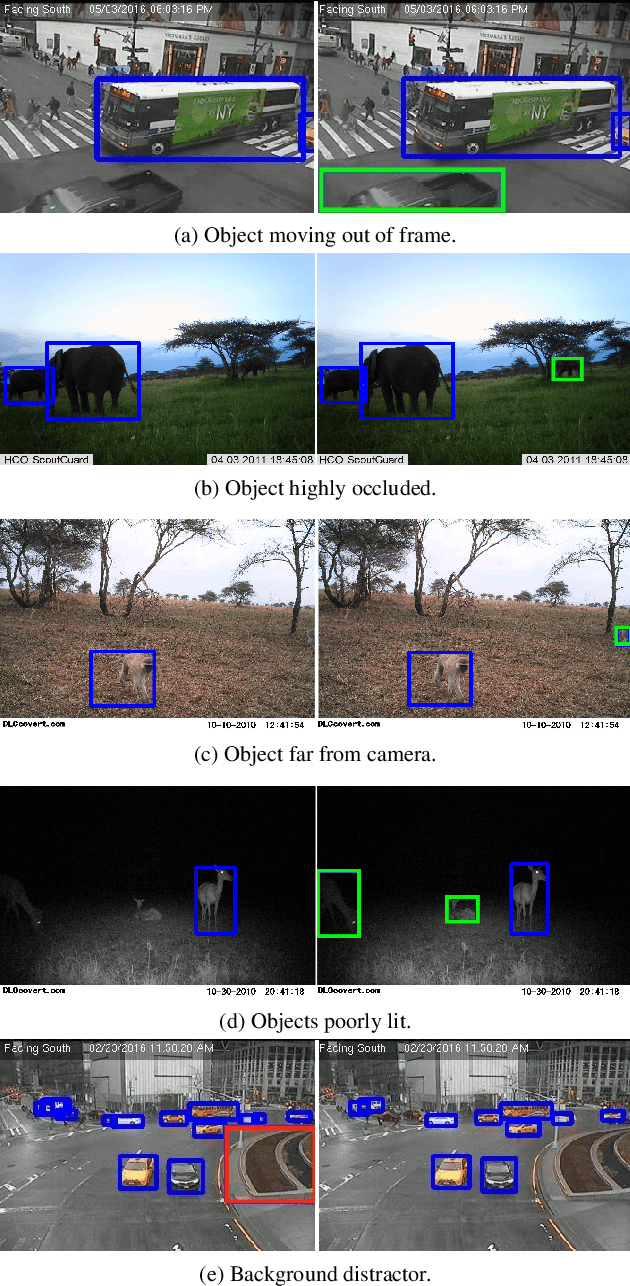
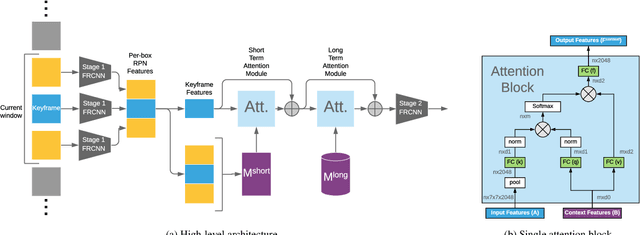
In static monitoring cameras, useful contextual information can stretch far beyond the few seconds typical video understanding models might see: subjects may exhibit similar behavior over multiple days, and background objects remain static. However, due to power and storage constraints, sampling frequencies are low, often no faster than one frame per second, and sometimes are irregular due to the use of a motion trigger. In order to perform well in this setting, models must be robust to irregular sampling rates. In this paper we propose an attention-based approach that allows our model to index into a long term memory bank constructed on a per-camera basis and aggregate contextual features from other frames to boost object detection performance on the current frame. We apply our models to two settings: (1) species detection using camera trap data, which is sampled at a low, variable frame rate based on a motion trigger and used to study biodiversity, and (2) vehicle detection in traffic cameras, which have similarly low frame rate. We show that our model leads to performance gains over strong baselines in all settings. Moreover, we show that increasing the time horizon for our memory bank leads to improved results. When applied to camera trap data from the Snapshot Serengeti dataset, our best model which leverages context from up to a month of images outperforms the single-frame baseline by 17.9% mAP at 0.5 IOU, and outperforms S3D (a 3d convolution based baseline) by 11.2% mAP.
Pooling Pyramid Network for Object Detection
Jul 09, 2018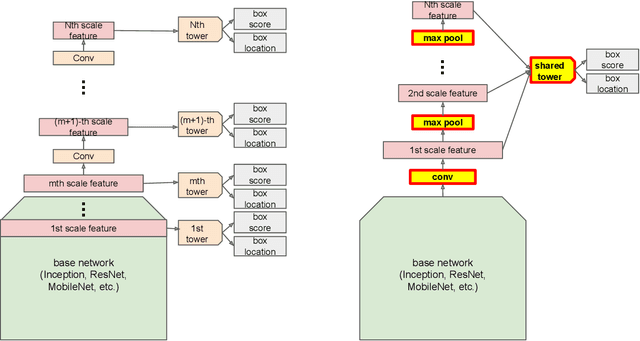

We'd like to share a simple tweak of Single Shot Multibox Detector (SSD) family of detectors, which is effective in reducing model size while maintaining the same quality. We share box predictors across all scales, and replace convolution between scales with max pooling. This has two advantages over vanilla SSD: (1) it avoids score miscalibration across scales; (2) the shared predictor sees the training data over all scales. Since we reduce the number of predictors to one, and trim all convolutions between them, model size is significantly smaller. We empirically show that these changes do not hurt model quality compared to vanilla SSD.
Speed/accuracy trade-offs for modern convolutional object detectors
Apr 25, 2017
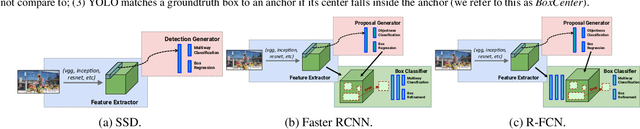
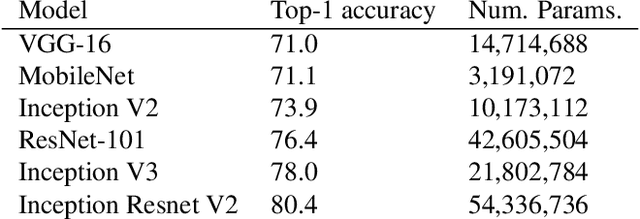
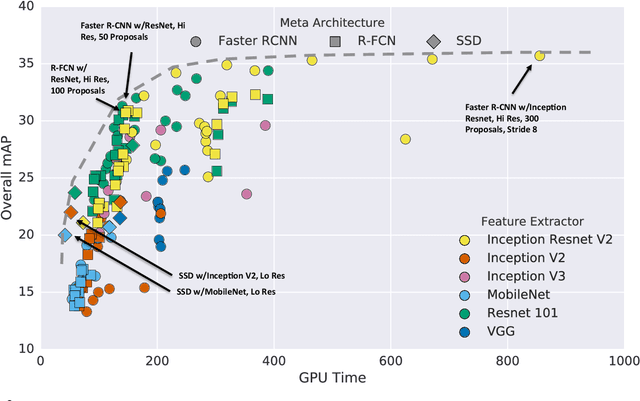
The goal of this paper is to serve as a guide for selecting a detection architecture that achieves the right speed/memory/accuracy balance for a given application and platform. To this end, we investigate various ways to trade accuracy for speed and memory usage in modern convolutional object detection systems. A number of successful systems have been proposed in recent years, but apples-to-apples comparisons are difficult due to different base feature extractors (e.g., VGG, Residual Networks), different default image resolutions, as well as different hardware and software platforms. We present a unified implementation of the Faster R-CNN [Ren et al., 2015], R-FCN [Dai et al., 2016] and SSD [Liu et al., 2015] systems, which we view as "meta-architectures" and trace out the speed/accuracy trade-off curve created by using alternative feature extractors and varying other critical parameters such as image size within each of these meta-architectures. On one extreme end of this spectrum where speed and memory are critical, we present a detector that achieves real time speeds and can be deployed on a mobile device. On the opposite end in which accuracy is critical, we present a detector that achieves state-of-the-art performance measured on the COCO detection task.
Deep Metric Learning via Facility Location
Apr 11, 2017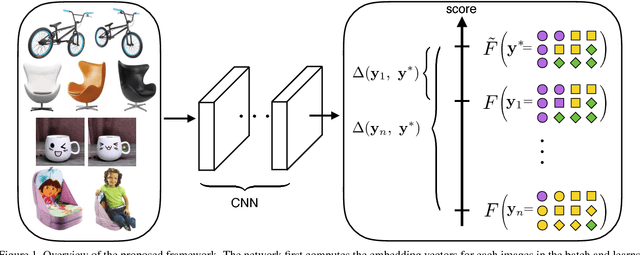
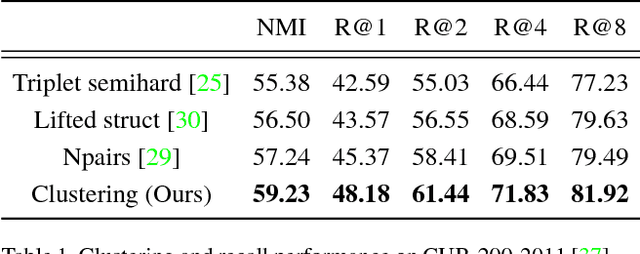
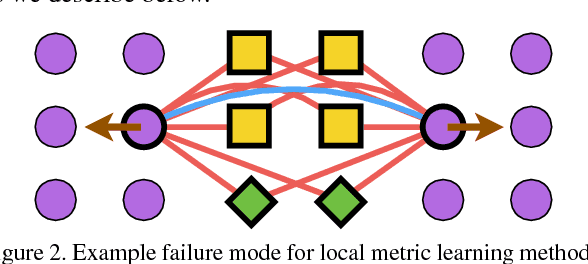
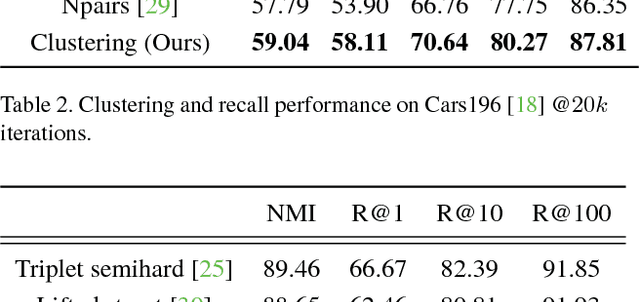
Learning the representation and the similarity metric in an end-to-end fashion with deep networks have demonstrated outstanding results for clustering and retrieval. However, these recent approaches still suffer from the performance degradation stemming from the local metric training procedure which is unaware of the global structure of the embedding space. We propose a global metric learning scheme for optimizing the deep metric embedding with the learnable clustering function and the clustering metric (NMI) in a novel structured prediction framework. Our experiments on CUB200-2011, Cars196, and Stanford online products datasets show state of the art performance both on the clustering and retrieval tasks measured in the NMI and Recall@K evaluation metrics.
Semantic Instance Segmentation via Deep Metric Learning
Mar 30, 2017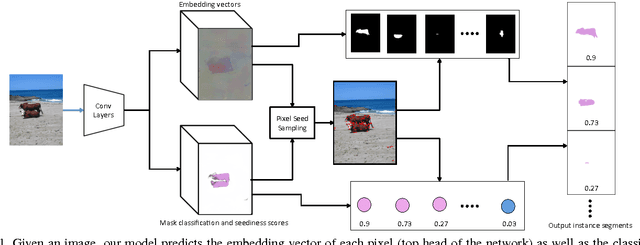
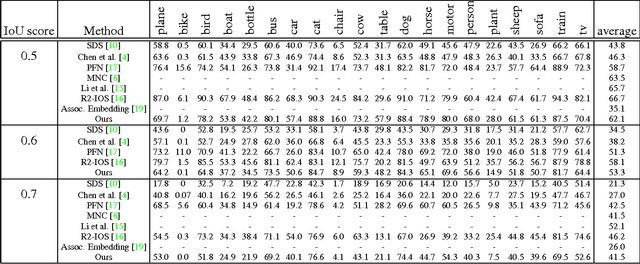
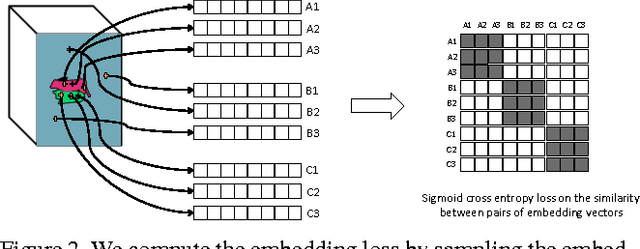
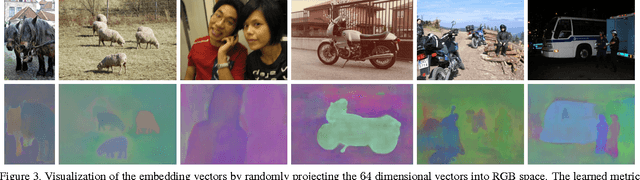
We propose a new method for semantic instance segmentation, by first computing how likely two pixels are to belong to the same object, and then by grouping similar pixels together. Our similarity metric is based on a deep, fully convolutional embedding model. Our grouping method is based on selecting all points that are sufficiently similar to a set of "seed points", chosen from a deep, fully convolutional scoring model. We show competitive results on the Pascal VOC instance segmentation benchmark.