 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParGANDA: Making Synthetic Pedestrians A Reality For Object Detection
Jul 21, 2023



Object detection is the key technique to a number of Computer Vision applications, but it often requires large amounts of annotated data to achieve decent results. Moreover, for pedestrian detection specifically, the collected data might contain some personally identifiable information (PII), which is highly restricted in many countries. This label intensive and privacy concerning task has recently led to an increasing interest in training the detection models using synthetically generated pedestrian datasets collected with a photo-realistic video game engine. The engine is able to generate unlimited amounts of data with precise and consistent annotations, which gives potential for significant gains in the real-world applications. However, the use of synthetic data for training introduces a synthetic-to-real domain shift aggravating the final performance. To close the gap between the real and synthetic data, we propose to use a Generative Adversarial Network (GAN), which performsparameterized unpaired image-to-image translation to generate more realistic images. The key benefit of using the GAN is its intrinsic preference of low-level changes to geometric ones, which means annotations of a given synthetic image remain accurate even after domain translation is performed thus eliminating the need for labeling real data. We extensively experimented with the proposed method using MOTSynth dataset to train and MOT17 and MOT20 detection datasets to test, with experimental results demonstrating the effectiveness of this method. Our approach not only produces visually plausible samples but also does not require any labels of the real domain thus making it applicable to the variety of downstream tasks.
TDT: Teaching Detectors to Track without Fully Annotated Videos
May 11, 2022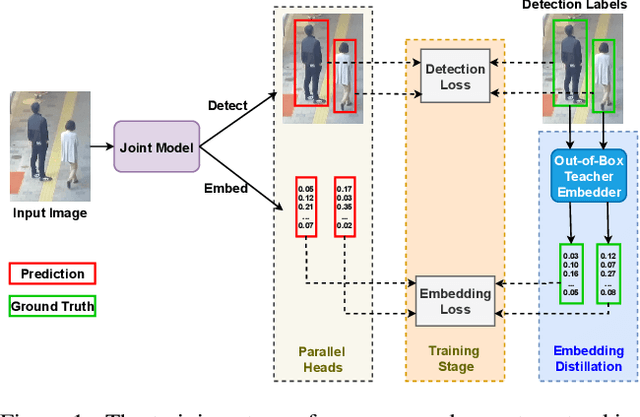
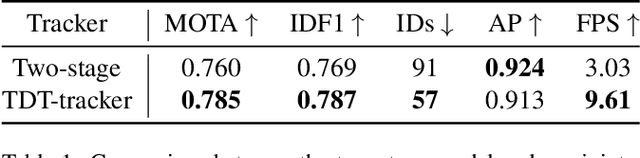
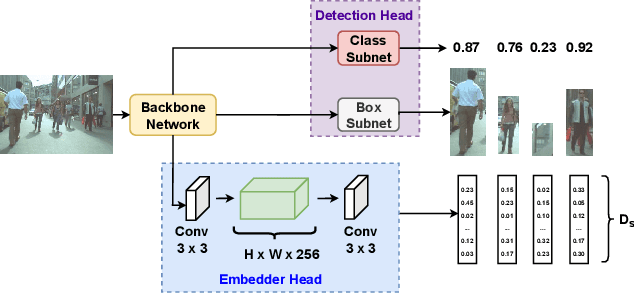
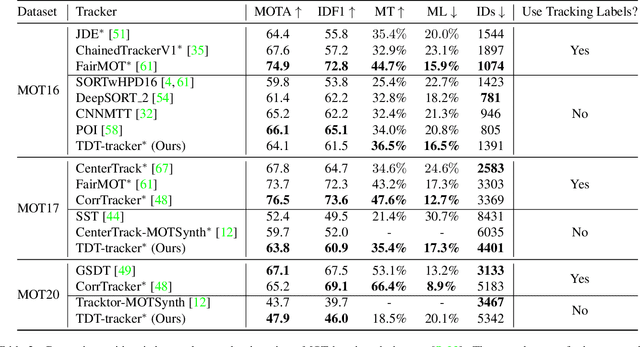
Recently, one-stage trackers that use a joint model to predict both detections and appearance embeddings in one forward pass received much attention and achieved state-of-the-art results on the Multi-Object Tracking (MOT) benchmarks. However, their success depends on the availability of videos that are fully annotated with tracking data, which is expensive and hard to obtain. This can limit the model generalization. In comparison, the two-stage approach, which performs detection and embedding separately, is slower but easier to train as their data are easier to annotate. We propose to combine the best of the two worlds through a data distillation approach. Specifically, we use a teacher embedder, trained on Re-ID datasets, to generate pseudo appearance embedding labels for the detection datasets. Then, we use the augmented dataset to train a detector that is also capable of regressing these pseudo-embeddings in a fully-convolutional fashion. Our proposed one-stage solution matches the two-stage counterpart in quality but is 3 times faster. Even though the teacher embedder has not seen any tracking data during training, our proposed tracker achieves competitive performance with some popular trackers (e.g. JDE) trained with fully labeled tracking data.
Learning from Weakly-labeled Web Videos via Exploring Sub-Concepts
Jan 11, 2021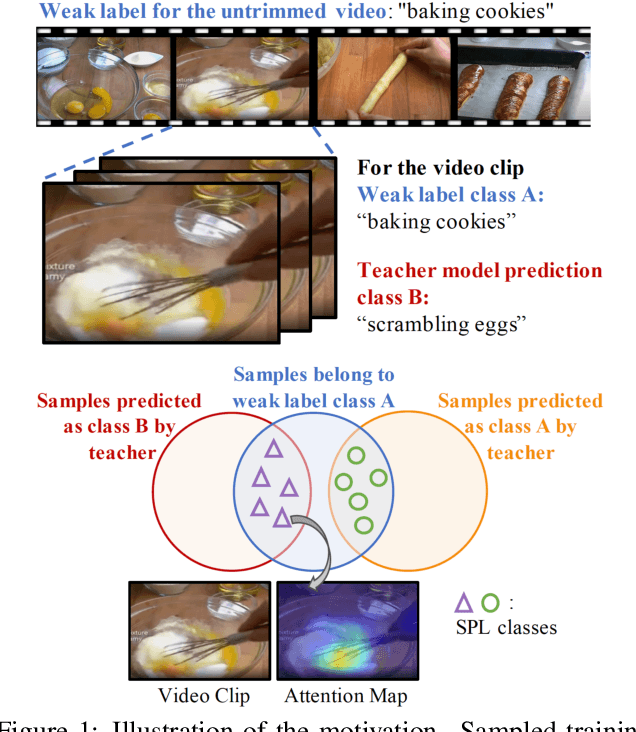
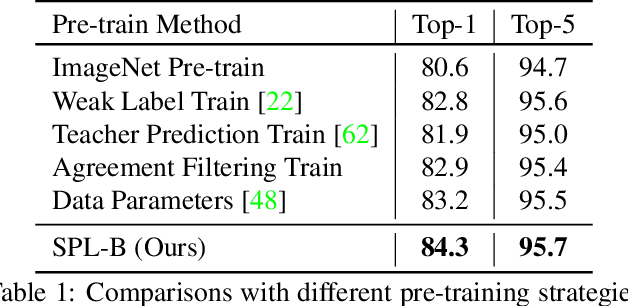

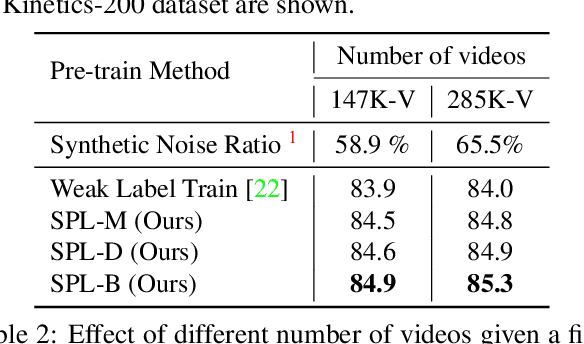
Learning visual knowledge from massive weakly-labeled web videos has attracted growing research interests thanks to the large corpus of easily accessible video data on the Internet. However, for video action recognition, the action of interest might only exist in arbitrary clips of untrimmed web videos, resulting in high label noises in the temporal space. To address this issue, we introduce a new method for pre-training video action recognition models using queried web videos. Instead of trying to filter out, we propose to convert the potential noises in these queried videos to useful supervision signals by defining the concept of Sub-Pseudo Label (SPL). Specifically, SPL spans out a new set of meaningful "middle ground" label space constructed by extrapolating the original weak labels during video querying and the prior knowledge distilled from a teacher model. Consequently, SPL provides enriched supervision for video models to learn better representations. SPL is fairly simple and orthogonal to popular teacher-student self-training frameworks without extra training cost. We validate the effectiveness of our method on four video action recognition datasets and a weakly-labeled image dataset to study the generalization ability. Experiments show that SPL outperforms several existing pre-training strategies using pseudo-labels and the learned representations lead to competitive results when fine-tuning on HMDB-51 and UCF-101 compared with recent pre-training methods.
Long Term Temporal Context for Per-Camera Object Detection
Dec 07, 2019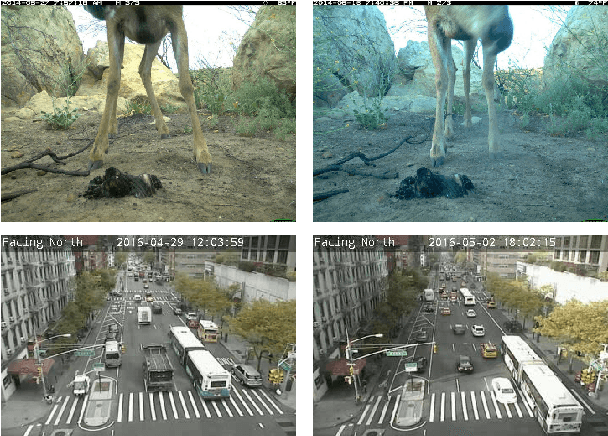
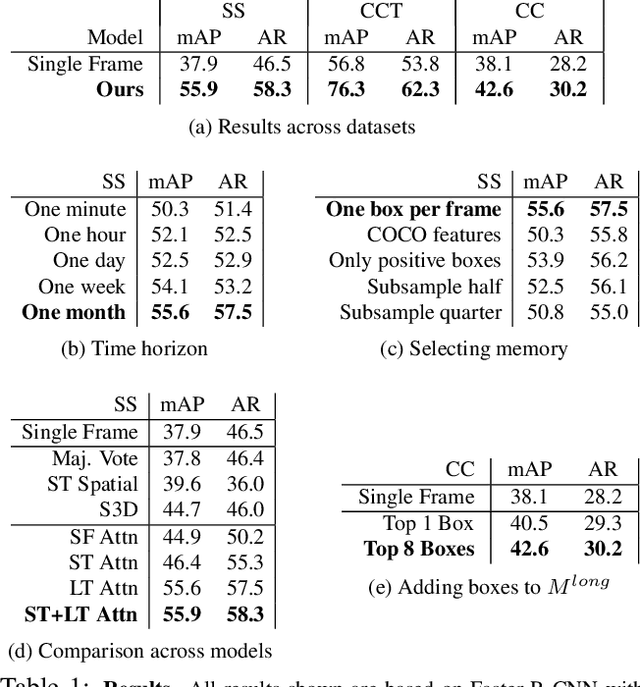
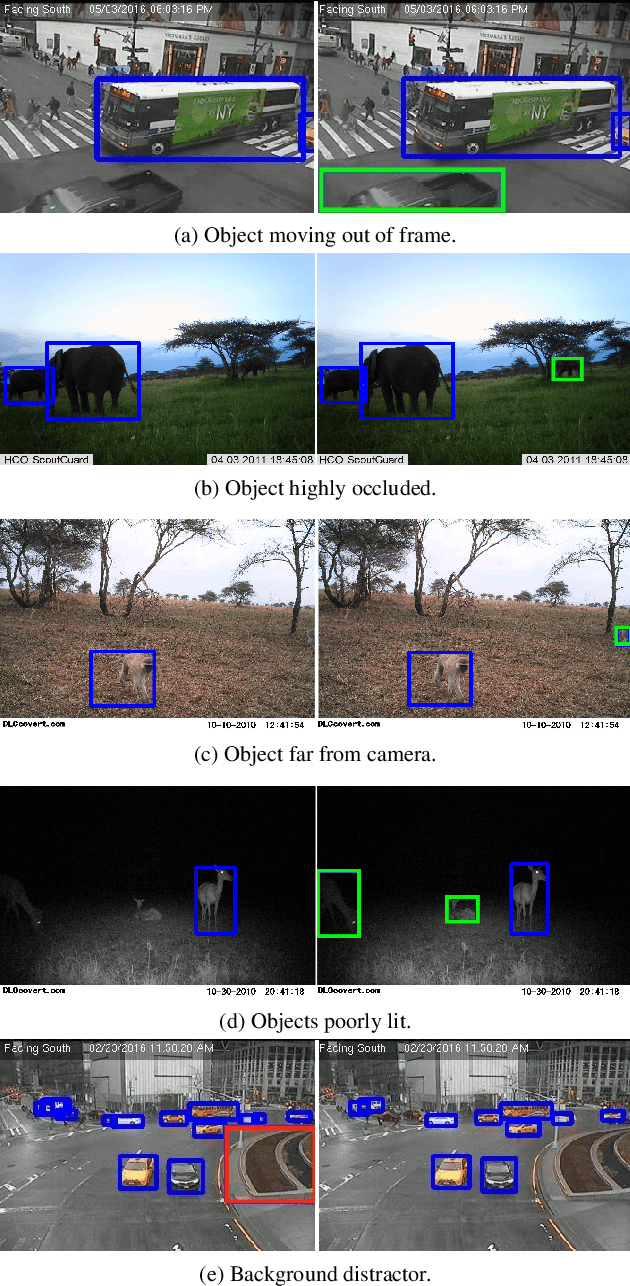
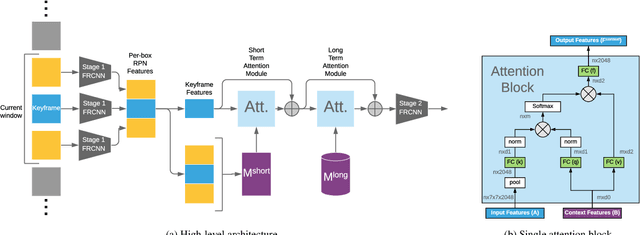
In static monitoring cameras, useful contextual information can stretch far beyond the few seconds typical video understanding models might see: subjects may exhibit similar behavior over multiple days, and background objects remain static. However, due to power and storage constraints, sampling frequencies are low, often no faster than one frame per second, and sometimes are irregular due to the use of a motion trigger. In order to perform well in this setting, models must be robust to irregular sampling rates. In this paper we propose an attention-based approach that allows our model to index into a long term memory bank constructed on a per-camera basis and aggregate contextual features from other frames to boost object detection performance on the current frame. We apply our models to two settings: (1) species detection using camera trap data, which is sampled at a low, variable frame rate based on a motion trigger and used to study biodiversity, and (2) vehicle detection in traffic cameras, which have similarly low frame rate. We show that our model leads to performance gains over strong baselines in all settings. Moreover, we show that increasing the time horizon for our memory bank leads to improved results. When applied to camera trap data from the Snapshot Serengeti dataset, our best model which leverages context from up to a month of images outperforms the single-frame baseline by 17.9% mAP at 0.5 IOU, and outperforms S3D (a 3d convolution based baseline) by 11.2% mAP.
Topology Adaptive Graph Convolutional Networks
Feb 11, 2018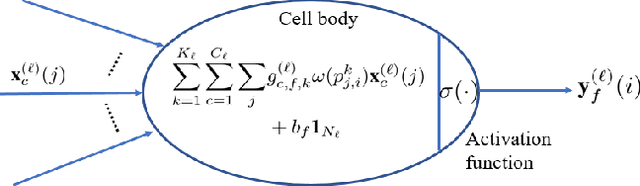

Spectral graph convolutional neural networks (CNNs) require approximation to the convolution to alleviate the computational complexity, resulting in performance loss. This paper proposes the topology adaptive graph convolutional network (TAGCN), a novel graph convolutional network defined in the vertex domain. We provide a systematic way to design a set of fixed-size learnable filters to perform convolutions on graphs. The topologies of these filters are adaptive to the topology of the graph when they scan the graph to perform convolution. The TAGCN not only inherits the properties of convolutions in CNN for grid-structured data, but it is also consistent with convolution as defined in graph signal processing. Since no approximation to the convolution is needed, TAGCN exhibits better performance than existing spectral CNNs on a number of data sets and is also computationally simpler than other recent methods.
Multiple Source Domain Adaptation with Adversarial Training of Neural Networks
Oct 27, 2017
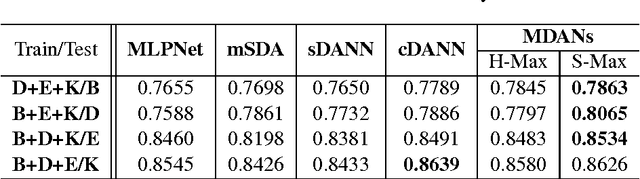
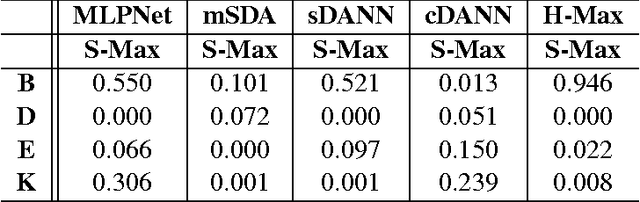
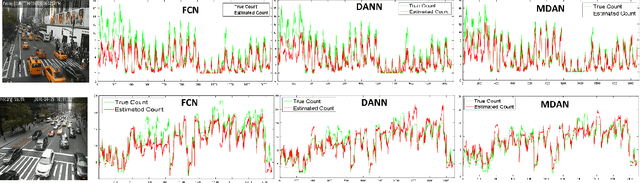
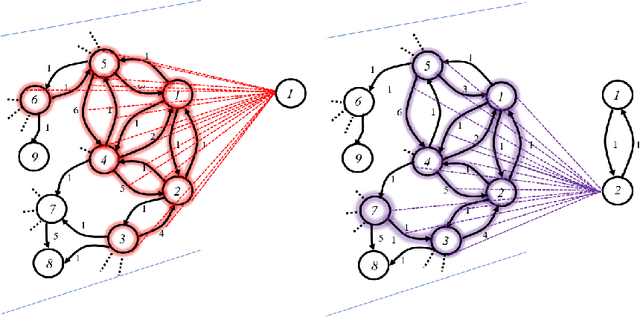
While domain adaptation has been actively researched in recent years, most theoretical results and algorithms focus on the single-source-single-target adaptation setting. Naive application of such algorithms on multiple source domain adaptation problem may lead to suboptimal solutions. As a step toward bridging the gap, we propose a new generalization bound for domain adaptation when there are multiple source domains with labeled instances and one target domain with unlabeled instances. Compared with existing bounds, the new bound does not require expert knowledge about the target distribution, nor the optimal combination rule for multisource domains. Interestingly, our theory also leads to an efficient learning strategy using adversarial neural networks: we show how to interpret it as learning feature representations that are invariant to the multiple domain shifts while still being discriminative for the learning task. To this end, we propose two models, both of which we call multisource domain adversarial networks (MDANs): the first model optimizes directly our bound, while the second model is a smoothed approximation of the first one, leading to a more data-efficient and task-adaptive model. The optimization tasks of both models are minimax saddle point problems that can be optimized by adversarial training. To demonstrate the effectiveness of MDANs, we conduct extensive experiments showing superior adaptation performance on three real-world datasets: sentiment analysis, digit classification, and vehicle counting.
FCN-rLSTM: Deep Spatio-Temporal Neural Networks for Vehicle Counting in City Cameras
Aug 01, 2017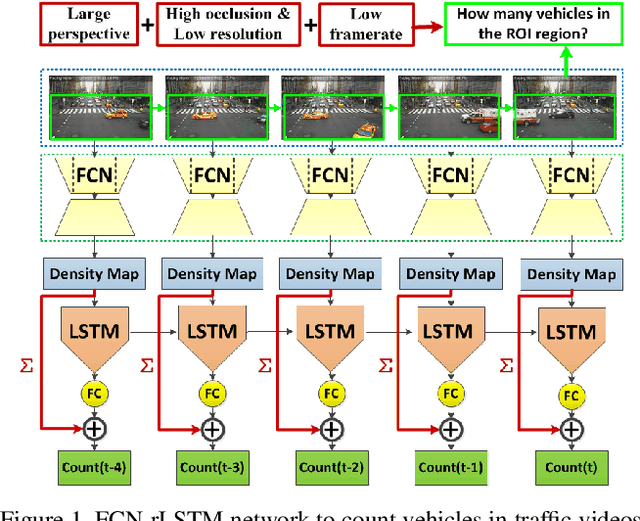
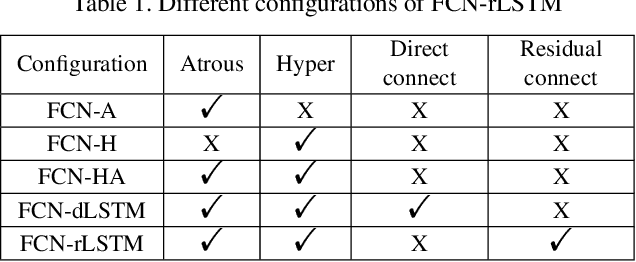
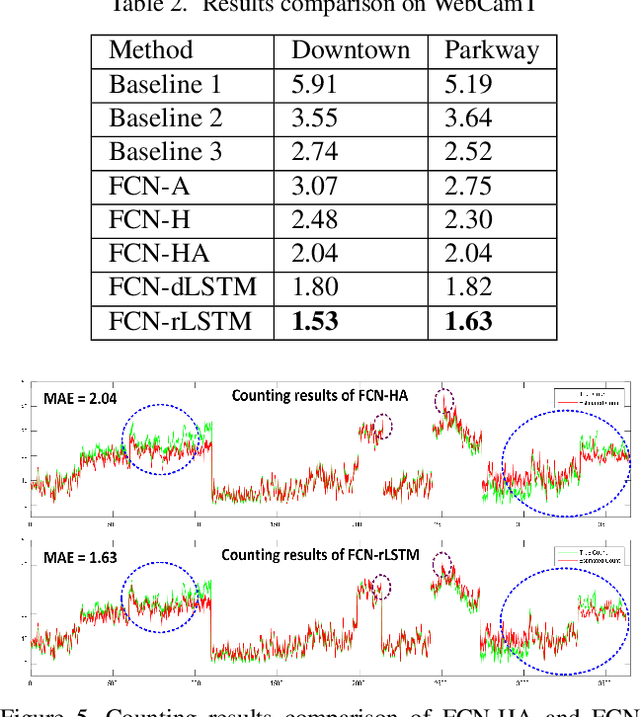
In this paper, we develop deep spatio-temporal neural networks to sequentially count vehicles from low quality videos captured by city cameras (citycams). Citycam videos have low resolution, low frame rate, high occlusion and large perspective, making most existing methods lose their efficacy. To overcome limitations of existing methods and incorporate the temporal information of traffic video, we design a novel FCN-rLSTM network to jointly estimate vehicle density and vehicle count by connecting fully convolutional neural networks (FCN) with long short term memory networks (LSTM) in a residual learning fashion. Such design leverages the strengths of FCN for pixel-level prediction and the strengths of LSTM for learning complex temporal dynamics. The residual learning connection reformulates the vehicle count regression as learning residual functions with reference to the sum of densities in each frame, which significantly accelerates the training of networks. To preserve feature map resolution, we propose a Hyper-Atrous combination to integrate atrous convolution in FCN and combine feature maps of different convolution layers. FCN-rLSTM enables refined feature representation and a novel end-to-end trainable mapping from pixels to vehicle count. We extensively evaluated the proposed method on different counting tasks with three datasets, with experimental results demonstrating their effectiveness and robustness. In particular, FCN-rLSTM reduces the mean absolute error (MAE) from 5.31 to 4.21 on TRANCOS, and reduces the MAE from 2.74 to 1.53 on WebCamT. Training process is accelerated by 5 times on average.
Understanding Traffic Density from Large-Scale Web Camera Data
Jun 30, 2017
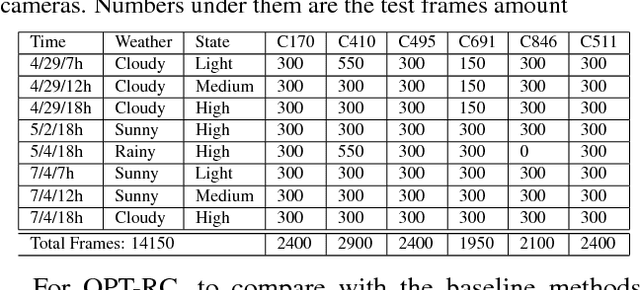
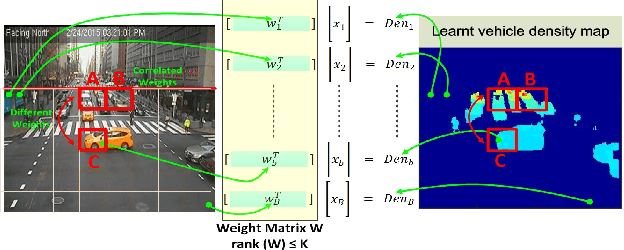
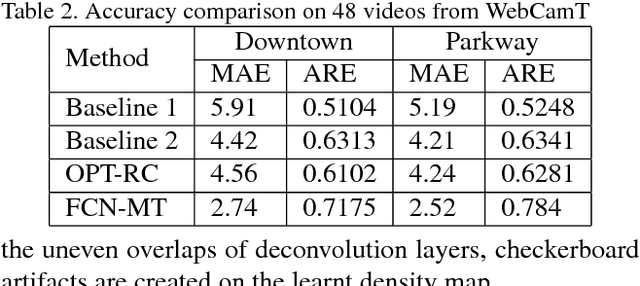
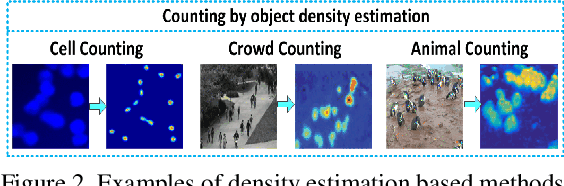
Understanding traffic density from large-scale web camera (webcam) videos is a challenging problem because such videos have low spatial and temporal resolution, high occlusion and large perspective. To deeply understand traffic density, we explore both deep learning based and optimization based methods. To avoid individual vehicle detection and tracking, both methods map the image into vehicle density map, one based on rank constrained regression and the other one based on fully convolution networks (FCN). The regression based method learns different weights for different blocks in the image to increase freedom degrees of weights and embed perspective information. The FCN based method jointly estimates vehicle density map and vehicle count with a residual learning framework to perform end-to-end dense prediction, allowing arbitrary image resolution, and adapting to different vehicle scales and perspectives. We analyze and compare both methods, and get insights from optimization based method to improve deep model. Since existing datasets do not cover all the challenges in our work, we collected and labelled a large-scale traffic video dataset, containing 60 million frames from 212 webcams. Both methods are extensively evaluated and compared on different counting tasks and datasets. FCN based method significantly reduces the mean absolute error from 10.99 to 5.31 on the public dataset TRANCOS compared with the state-of-the-art baseline.