 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRetinaTrack: Online Single Stage Joint Detection and Tracking
Paper and Code

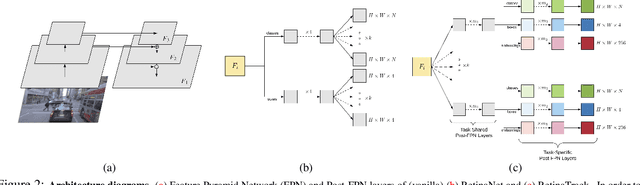
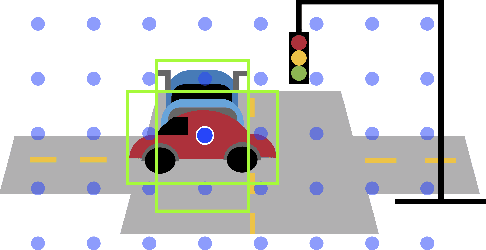
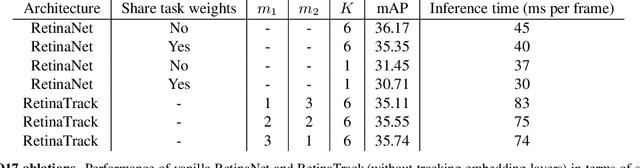
Traditionally multi-object tracking and object detection are performed using separate systems with most prior works focusing exclusively on one of these aspects over the other. Tracking systems clearly benefit from having access to accurate detections, however and there is ample evidence in literature that detectors can benefit from tracking which, for example, can help to smooth predictions over time. In this paper we focus on the tracking-by-detection paradigm for autonomous driving where both tasks are mission critical. We propose a conceptually simple and efficient joint model of detection and tracking, called RetinaTrack, which modifies the popular single stage RetinaNet approach such that it is amenable to instance-level embedding training. We show, via evaluations on the Waymo Open Dataset, that we outperform a recent state of the art tracking algorithm while requiring significantly less computation. We believe that our simple yet effective approach can serve as a strong baseline for future work in this area.