 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDream2Flow: Bridging Video Generation and Open-World Manipulation with 3D Object Flow
Dec 31, 2025Generative video modeling has emerged as a compelling tool to zero-shot reason about plausible physical interactions for open-world manipulation. Yet, it remains a challenge to translate such human-led motions into the low-level actions demanded by robotic systems. We observe that given an initial image and task instruction, these models excel at synthesizing sensible object motions. Thus, we introduce Dream2Flow, a framework that bridges video generation and robotic control through 3D object flow as an intermediate representation. Our method reconstructs 3D object motions from generated videos and formulates manipulation as object trajectory tracking. By separating the state changes from the actuators that realize those changes, Dream2Flow overcomes the embodiment gap and enables zero-shot guidance from pre-trained video models to manipulate objects of diverse categories-including rigid, articulated, deformable, and granular. Through trajectory optimization or reinforcement learning, Dream2Flow converts reconstructed 3D object flow into executable low-level commands without task-specific demonstrations. Simulation and real-world experiments highlight 3D object flow as a general and scalable interface for adapting video generation models to open-world robotic manipulation. Videos and visualizations are available at https://dream2flow.github.io/.
UAD: Unsupervised Affordance Distillation for Generalization in Robotic Manipulation
Jun 10, 2025Understanding fine-grained object affordances is imperative for robots to manipulate objects in unstructured environments given open-ended task instructions. However, existing methods of visual affordance predictions often rely on manually annotated data or conditions only on a predefined set of tasks. We introduce UAD (Unsupervised Affordance Distillation), a method for distilling affordance knowledge from foundation models into a task-conditioned affordance model without any manual annotations. By leveraging the complementary strengths of large vision models and vision-language models, UAD automatically annotates a large-scale dataset with detailed $<$instruction, visual affordance$>$ pairs. Training only a lightweight task-conditioned decoder atop frozen features, UAD exhibits notable generalization to in-the-wild robotic scenes and to various human activities, despite only being trained on rendered objects in simulation. Using affordance provided by UAD as the observation space, we show an imitation learning policy that demonstrates promising generalization to unseen object instances, object categories, and even variations in task instructions after training on as few as 10 demonstrations. Project website: https://unsup-affordance.github.io/
Learning Compositional Behaviors from Demonstration and Language
May 28, 2025



We introduce Behavior from Language and Demonstration (BLADE), a framework for long-horizon robotic manipulation by integrating imitation learning and model-based planning. BLADE leverages language-annotated demonstrations, extracts abstract action knowledge from large language models (LLMs), and constructs a library of structured, high-level action representations. These representations include preconditions and effects grounded in visual perception for each high-level action, along with corresponding controllers implemented as neural network-based policies. BLADE can recover such structured representations automatically, without manually labeled states or symbolic definitions. BLADE shows significant capabilities in generalizing to novel situations, including novel initial states, external state perturbations, and novel goals. We validate the effectiveness of our approach both in simulation and on real robots with a diverse set of objects with articulated parts, partial observability, and geometric constraints.
Chain-of-Modality: Learning Manipulation Programs from Multimodal Human Videos with Vision-Language-Models
Apr 17, 2025Learning to perform manipulation tasks from human videos is a promising approach for teaching robots. However, many manipulation tasks require changing control parameters during task execution, such as force, which visual data alone cannot capture. In this work, we leverage sensing devices such as armbands that measure human muscle activities and microphones that record sound, to capture the details in the human manipulation process, and enable robots to extract task plans and control parameters to perform the same task. To achieve this, we introduce Chain-of-Modality (CoM), a prompting strategy that enables Vision Language Models to reason about multimodal human demonstration data -- videos coupled with muscle or audio signals. By progressively integrating information from each modality, CoM refines a task plan and generates detailed control parameters, enabling robots to perform manipulation tasks based on a single multimodal human video prompt. Our experiments show that CoM delivers a threefold improvement in accuracy for extracting task plans and control parameters compared to baselines, with strong generalization to new task setups and objects in real-world robot experiments. Videos and code are available at https://chain-of-modality.github.io
BEHAVIOR Robot Suite: Streamlining Real-World Whole-Body Manipulation for Everyday Household Activities
Mar 07, 2025Real-world household tasks present significant challenges for mobile manipulation robots. An analysis of existing robotics benchmarks reveals that successful task performance hinges on three key whole-body control capabilities: bimanual coordination, stable and precise navigation, and extensive end-effector reachability. Achieving these capabilities requires careful hardware design, but the resulting system complexity further complicates visuomotor policy learning. To address these challenges, we introduce the BEHAVIOR Robot Suite (BRS), a comprehensive framework for whole-body manipulation in diverse household tasks. Built on a bimanual, wheeled robot with a 4-DoF torso, BRS integrates a cost-effective whole-body teleoperation interface for data collection and a novel algorithm for learning whole-body visuomotor policies. We evaluate BRS on five challenging household tasks that not only emphasize the three core capabilities but also introduce additional complexities, such as long-range navigation, interaction with articulated and deformable objects, and manipulation in confined spaces. We believe that BRS's integrated robotic embodiment, data collection interface, and learning framework mark a significant step toward enabling real-world whole-body manipulation for everyday household tasks. BRS is open-sourced at https://behavior-robot-suite.github.io/
ShapeCraft: Body-Aware and Semantics-Aware 3D Object Design
Dec 05, 2024



For designing a wide range of everyday objects, the design process should be aware of both the human body and the underlying semantics of the design specification. However, these two objectives present significant challenges to the current AI-based designing tools. In this work, we present a method to synthesize body-aware 3D objects from a base mesh given an input body geometry and either text or image as guidance. The generated objects can be simulated on virtual characters, or fabricated for real-world use. We propose to use a mesh deformation procedure that optimizes for both semantic alignment as well as contact and penetration losses. Using our method, users can generate both virtual or real-world objects from text, image, or sketch, without the need for manual artist intervention. We present both qualitative and quantitative results on various object categories, demonstrating the effectiveness of our approach.
Embodied Agent Interface: Benchmarking LLMs for Embodied Decision Making
Oct 09, 2024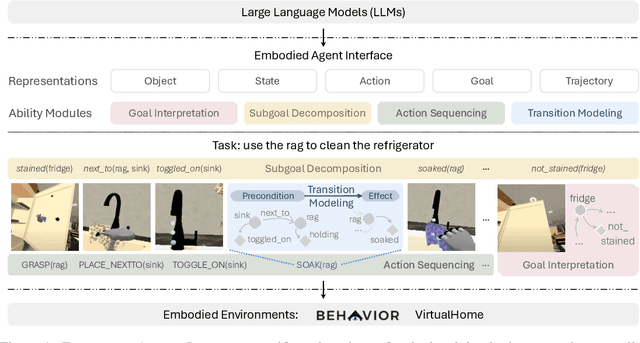
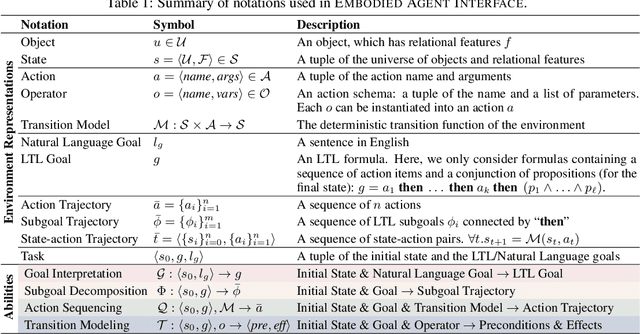
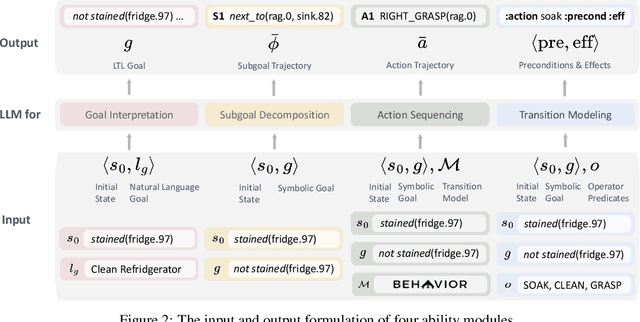
We aim to evaluate Large Language Models (LLMs) for embodied decision making. While a significant body of work has been leveraging LLMs for decision making in embodied environments, we still lack a systematic understanding of their performance because they are usually applied in different domains, for different purposes, and built based on different inputs and outputs. Furthermore, existing evaluations tend to rely solely on a final success rate, making it difficult to pinpoint what ability is missing in LLMs and where the problem lies, which in turn blocks embodied agents from leveraging LLMs effectively and selectively. To address these limitations, we propose a generalized interface (Embodied Agent Interface) that supports the formalization of various types of tasks and input-output specifications of LLM-based modules. Specifically, it allows us to unify 1) a broad set of embodied decision-making tasks involving both state and temporally extended goals, 2) four commonly-used LLM-based modules for decision making: goal interpretation, subgoal decomposition, action sequencing, and transition modeling, and 3) a collection of fine-grained metrics which break down evaluation into various types of errors, such as hallucination errors, affordance errors, various types of planning errors, etc. Overall, our benchmark offers a comprehensive assessment of LLMs' performance for different subtasks, pinpointing the strengths and weaknesses in LLM-powered embodied AI systems, and providing insights for effective and selective use of LLMs in embodied decision making.
ACDC: Automated Creation of Digital Cousins for Robust Policy Learning
Oct 09, 2024



Training robot policies in the real world can be unsafe, costly, and difficult to scale. Simulation serves as an inexpensive and potentially limitless source of training data, but suffers from the semantics and physics disparity beween simulated and real-world environments. These discrepancies can be minimized by training in digital twins,which serve as virtual replicas of a real scene but are expensive to generate and cannot produce cross-domain generalization. To address these limitations, we propose the concept of digital cousins, a virtual asset or scene that, unlike a digital twin,does not explicitly model a real-world counterpart but still exhibits similar geometric and semantic affordances. As a result, digital cousins simultaneously reduce the cost of generating an analogous virtual environment while also facilitating better robustness during sim-to-real domain transfer by providing a distribution of similar training scenes. Leveraging digital cousins, we introduce a novel method for the Automatic Creation of Digital Cousins (ACDC), and propose a fully automated real-to-sim-to-real pipeline for generating fully interactive scenes and training robot policies that can be deployed zero-shot in the original scene. We find that ACDC can produce digital cousin scenes that preserve geometric and semantic affordances, and can be used to train policies that outperform policies trained on digital twins, achieving 90% vs. 25% under zero-shot sim-to-real transfer. Additional details are available at https://digital-cousins.github.io/.
MARPLE: A Benchmark for Long-Horizon Inference
Oct 02, 2024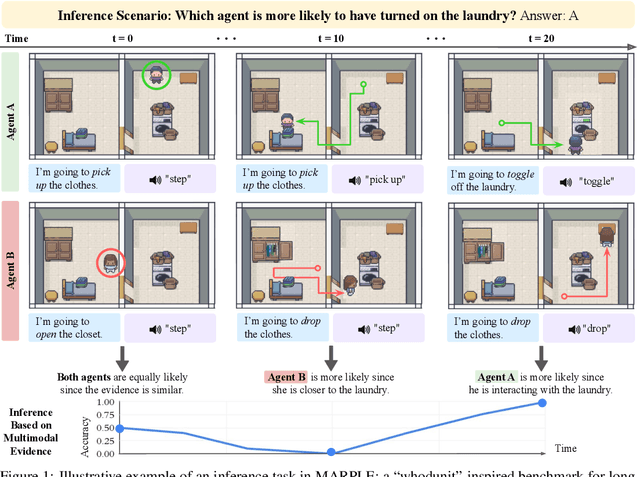

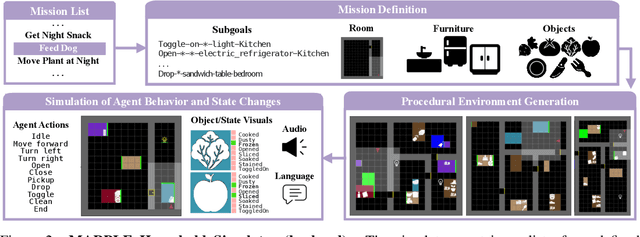

Reconstructing past events requires reasoning across long time horizons. To figure out what happened, we need to use our prior knowledge about the world and human behavior and draw inferences from various sources of evidence including visual, language, and auditory cues. We introduce MARPLE, a benchmark for evaluating long-horizon inference capabilities using multi-modal evidence. Our benchmark features agents interacting with simulated households, supporting vision, language, and auditory stimuli, as well as procedurally generated environments and agent behaviors. Inspired by classic ``whodunit'' stories, we ask AI models and human participants to infer which agent caused a change in the environment based on a step-by-step replay of what actually happened. The goal is to correctly identify the culprit as early as possible. Our findings show that human participants outperform both traditional Monte Carlo simulation methods and an LLM baseline (GPT-4) on this task. Compared to humans, traditional inference models are less robust and performant, while GPT-4 has difficulty comprehending environmental changes. We analyze what factors influence inference performance and ablate different modes of evidence, finding that all modes are valuable for performance. Overall, our experiments demonstrate that the long-horizon, multimodal inference tasks in our benchmark present a challenge to current models.
ReKep: Spatio-Temporal Reasoning of Relational Keypoint Constraints for Robotic Manipulation
Sep 03, 2024



Representing robotic manipulation tasks as constraints that associate the robot and the environment is a promising way to encode desired robot behaviors. However, it remains unclear how to formulate the constraints such that they are 1) versatile to diverse tasks, 2) free of manual labeling, and 3) optimizable by off-the-shelf solvers to produce robot actions in real-time. In this work, we introduce Relational Keypoint Constraints (ReKep), a visually-grounded representation for constraints in robotic manipulation. Specifically, ReKep is expressed as Python functions mapping a set of 3D keypoints in the environment to a numerical cost. We demonstrate that by representing a manipulation task as a sequence of Relational Keypoint Constraints, we can employ a hierarchical optimization procedure to solve for robot actions (represented by a sequence of end-effector poses in SE(3)) with a perception-action loop at a real-time frequency. Furthermore, in order to circumvent the need for manual specification of ReKep for each new task, we devise an automated procedure that leverages large vision models and vision-language models to produce ReKep from free-form language instructions and RGB-D observations. We present system implementations on a wheeled single-arm platform and a stationary dual-arm platform that can perform a large variety of manipulation tasks, featuring multi-stage, in-the-wild, bimanual, and reactive behaviors, all without task-specific data or environment models. Website at https://rekep-robot.github.io.