 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBEHAVIOR Robot Suite: Streamlining Real-World Whole-Body Manipulation for Everyday Household Activities
Mar 07, 2025Real-world household tasks present significant challenges for mobile manipulation robots. An analysis of existing robotics benchmarks reveals that successful task performance hinges on three key whole-body control capabilities: bimanual coordination, stable and precise navigation, and extensive end-effector reachability. Achieving these capabilities requires careful hardware design, but the resulting system complexity further complicates visuomotor policy learning. To address these challenges, we introduce the BEHAVIOR Robot Suite (BRS), a comprehensive framework for whole-body manipulation in diverse household tasks. Built on a bimanual, wheeled robot with a 4-DoF torso, BRS integrates a cost-effective whole-body teleoperation interface for data collection and a novel algorithm for learning whole-body visuomotor policies. We evaluate BRS on five challenging household tasks that not only emphasize the three core capabilities but also introduce additional complexities, such as long-range navigation, interaction with articulated and deformable objects, and manipulation in confined spaces. We believe that BRS's integrated robotic embodiment, data collection interface, and learning framework mark a significant step toward enabling real-world whole-body manipulation for everyday household tasks. BRS is open-sourced at https://behavior-robot-suite.github.io/
Embodied Agent Interface: Benchmarking LLMs for Embodied Decision Making
Oct 09, 2024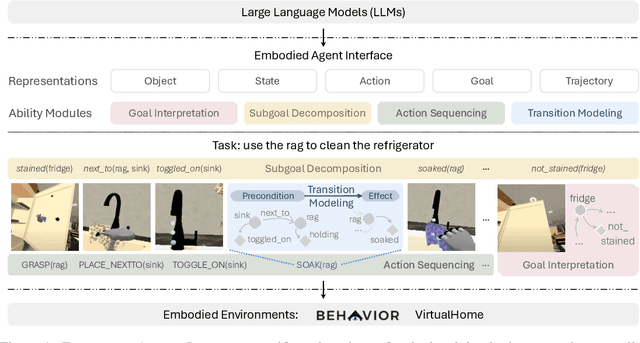
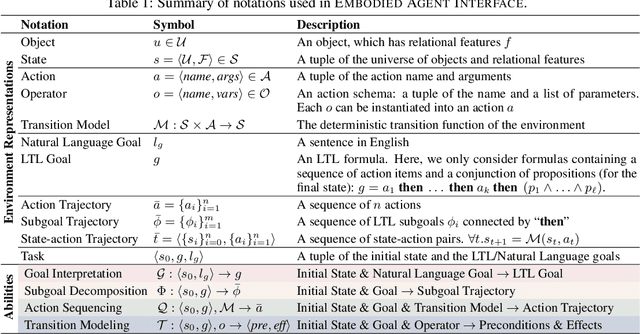
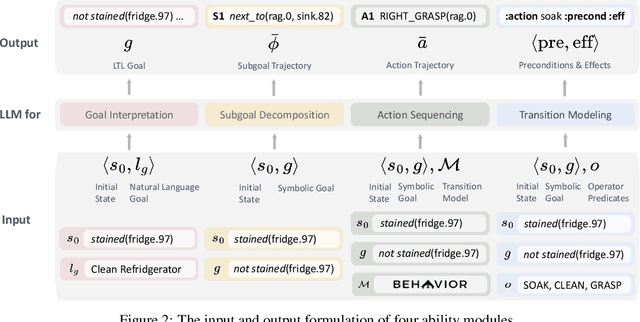
We aim to evaluate Large Language Models (LLMs) for embodied decision making. While a significant body of work has been leveraging LLMs for decision making in embodied environments, we still lack a systematic understanding of their performance because they are usually applied in different domains, for different purposes, and built based on different inputs and outputs. Furthermore, existing evaluations tend to rely solely on a final success rate, making it difficult to pinpoint what ability is missing in LLMs and where the problem lies, which in turn blocks embodied agents from leveraging LLMs effectively and selectively. To address these limitations, we propose a generalized interface (Embodied Agent Interface) that supports the formalization of various types of tasks and input-output specifications of LLM-based modules. Specifically, it allows us to unify 1) a broad set of embodied decision-making tasks involving both state and temporally extended goals, 2) four commonly-used LLM-based modules for decision making: goal interpretation, subgoal decomposition, action sequencing, and transition modeling, and 3) a collection of fine-grained metrics which break down evaluation into various types of errors, such as hallucination errors, affordance errors, various types of planning errors, etc. Overall, our benchmark offers a comprehensive assessment of LLMs' performance for different subtasks, pinpointing the strengths and weaknesses in LLM-powered embodied AI systems, and providing insights for effective and selective use of LLMs in embodied decision making.
ACDC: Automated Creation of Digital Cousins for Robust Policy Learning
Oct 09, 2024



Training robot policies in the real world can be unsafe, costly, and difficult to scale. Simulation serves as an inexpensive and potentially limitless source of training data, but suffers from the semantics and physics disparity beween simulated and real-world environments. These discrepancies can be minimized by training in digital twins,which serve as virtual replicas of a real scene but are expensive to generate and cannot produce cross-domain generalization. To address these limitations, we propose the concept of digital cousins, a virtual asset or scene that, unlike a digital twin,does not explicitly model a real-world counterpart but still exhibits similar geometric and semantic affordances. As a result, digital cousins simultaneously reduce the cost of generating an analogous virtual environment while also facilitating better robustness during sim-to-real domain transfer by providing a distribution of similar training scenes. Leveraging digital cousins, we introduce a novel method for the Automatic Creation of Digital Cousins (ACDC), and propose a fully automated real-to-sim-to-real pipeline for generating fully interactive scenes and training robot policies that can be deployed zero-shot in the original scene. We find that ACDC can produce digital cousin scenes that preserve geometric and semantic affordances, and can be used to train policies that outperform policies trained on digital twins, achieving 90% vs. 25% under zero-shot sim-to-real transfer. Additional details are available at https://digital-cousins.github.io/.
BEHAVIOR Vision Suite: Customizable Dataset Generation via Simulation
May 15, 2024



The systematic evaluation and understanding of computer vision models under varying conditions require large amounts of data with comprehensive and customized labels, which real-world vision datasets rarely satisfy. While current synthetic data generators offer a promising alternative, particularly for embodied AI tasks, they often fall short for computer vision tasks due to low asset and rendering quality, limited diversity, and unrealistic physical properties. We introduce the BEHAVIOR Vision Suite (BVS), a set of tools and assets to generate fully customized synthetic data for systematic evaluation of computer vision models, based on the newly developed embodied AI benchmark, BEHAVIOR-1K. BVS supports a large number of adjustable parameters at the scene level (e.g., lighting, object placement), the object level (e.g., joint configuration, attributes such as "filled" and "folded"), and the camera level (e.g., field of view, focal length). Researchers can arbitrarily vary these parameters during data generation to perform controlled experiments. We showcase three example application scenarios: systematically evaluating the robustness of models across different continuous axes of domain shift, evaluating scene understanding models on the same set of images, and training and evaluating simulation-to-real transfer for a novel vision task: unary and binary state prediction. Project website: https://behavior-vision-suite.github.io/
BEHAVIOR-1K: A Human-Centered, Embodied AI Benchmark with 1,000 Everyday Activities and Realistic Simulation
Mar 14, 2024



We present BEHAVIOR-1K, a comprehensive simulation benchmark for human-centered robotics. BEHAVIOR-1K includes two components, guided and motivated by the results of an extensive survey on "what do you want robots to do for you?". The first is the definition of 1,000 everyday activities, grounded in 50 scenes (houses, gardens, restaurants, offices, etc.) with more than 9,000 objects annotated with rich physical and semantic properties. The second is OMNIGIBSON, a novel simulation environment that supports these activities via realistic physics simulation and rendering of rigid bodies, deformable bodies, and liquids. Our experiments indicate that the activities in BEHAVIOR-1K are long-horizon and dependent on complex manipulation skills, both of which remain a challenge for even state-of-the-art robot learning solutions. To calibrate the simulation-to-reality gap of BEHAVIOR-1K, we provide an initial study on transferring solutions learned with a mobile manipulator in a simulated apartment to its real-world counterpart. We hope that BEHAVIOR-1K's human-grounded nature, diversity, and realism make it valuable for embodied AI and robot learning research. Project website: https://behavior.stanford.edu.
Asking for Help: Failure Prediction in Behavioral Cloning through Value Approximation
Feb 08, 2023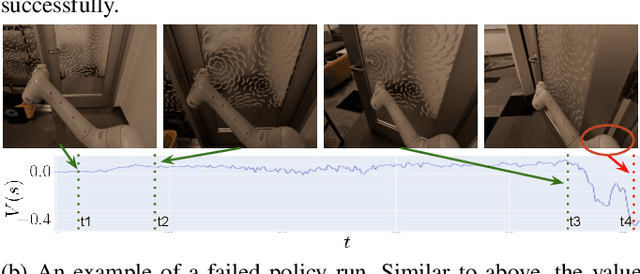
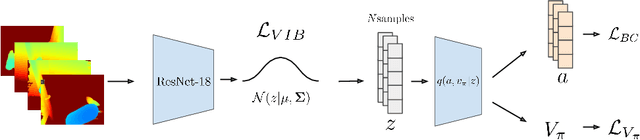
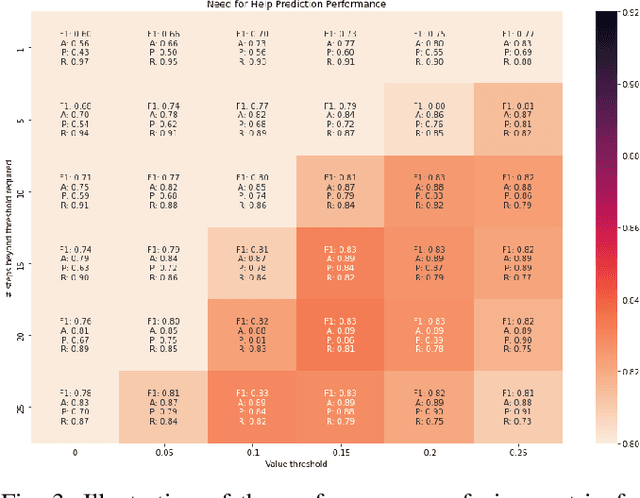
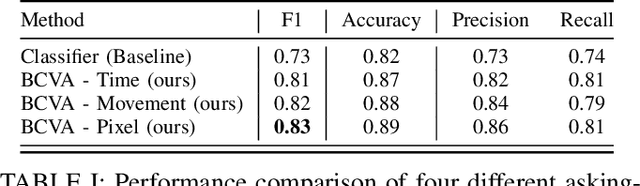
Recent progress in end-to-end Imitation Learning approaches has shown promising results and generalization capabilities on mobile manipulation tasks. Such models are seeing increasing deployment in real-world settings, where scaling up requires robots to be able to operate with high autonomy, i.e. requiring as little human supervision as possible. In order to avoid the need for one-on-one human supervision, robots need to be able to detect and prevent policy failures ahead of time, and ask for help, allowing a remote operator to supervise multiple robots and help when needed. However, the black-box nature of end-to-end Imitation Learning models such as Behavioral Cloning, as well as the lack of an explicit state-value representation, make it difficult to predict failures. To this end, we introduce Behavioral Cloning Value Approximation (BCVA), an approach to learning a state value function based on and trained jointly with a Behavioral Cloning policy that can be used to predict failures. We demonstrate the effectiveness of BCVA by applying it to the challenging mobile manipulation task of latched-door opening, showing that we can identify failure scenarios with with 86% precision and 81% recall, evaluated on over 2000 real world runs, improving upon the baseline of simple failure classification by 10 percentage-points.
iGibson 2.0: Object-Centric Simulation for Robot Learning of Everyday Household Tasks
Aug 10, 2021



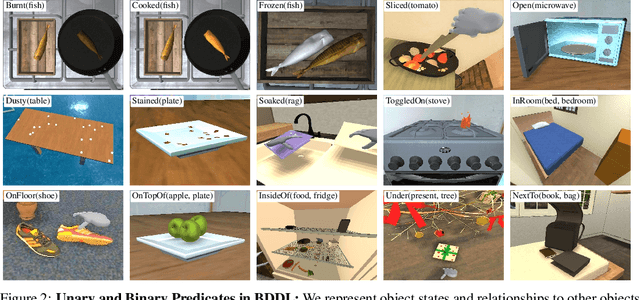
Recent research in embodied AI has been boosted by the use of simulation environments to develop and train robot learning approaches. However, the use of simulation has skewed the attention to tasks that only require what robotics simulators can simulate: motion and physical contact. We present iGibson 2.0, an open-source simulation environment that supports the simulation of a more diverse set of household tasks through three key innovations. First, iGibson 2.0 supports object states, including temperature, wetness level, cleanliness level, and toggled and sliced states, necessary to cover a wider range of tasks. Second, iGibson 2.0 implements a set of predicate logic functions that map the simulator states to logic states like Cooked or Soaked. Additionally, given a logic state, iGibson 2.0 can sample valid physical states that satisfy it. This functionality can generate potentially infinite instances of tasks with minimal effort from the users. The sampling mechanism allows our scenes to be more densely populated with small objects in semantically meaningful locations. Third, iGibson 2.0 includes a virtual reality (VR) interface to immerse humans in its scenes to collect demonstrations. As a result, we can collect demonstrations from humans on these new types of tasks, and use them for imitation learning. We evaluate the new capabilities of iGibson 2.0 to enable robot learning of novel tasks, in the hope of demonstrating the potential of this new simulator to support new research in embodied AI. iGibson 2.0 and its new dataset will be publicly available at http://svl.stanford.edu/igibson/.
BEHAVIOR: Benchmark for Everyday Household Activities in Virtual, Interactive, and Ecological Environments
Aug 06, 2021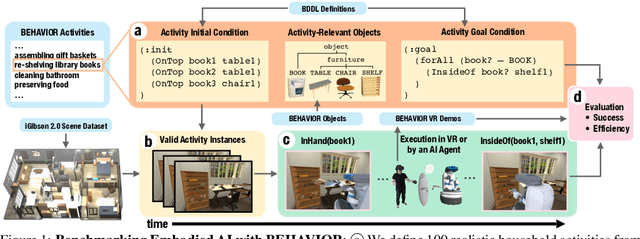
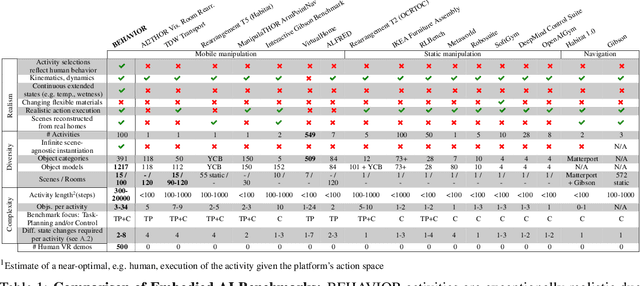
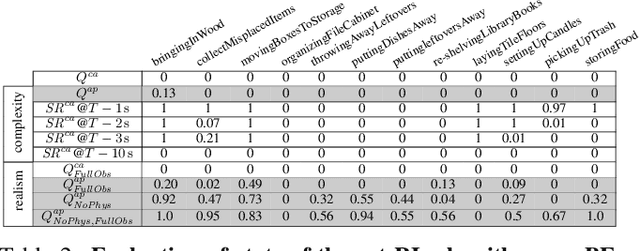
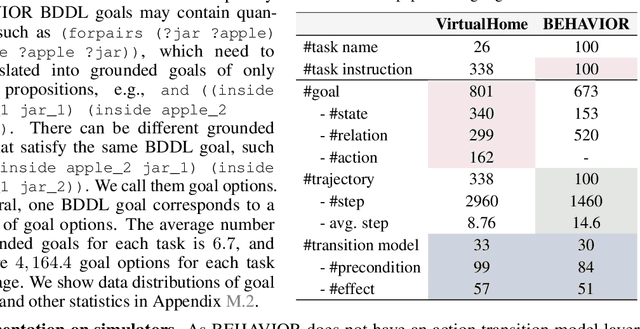
We introduce BEHAVIOR, a benchmark for embodied AI with 100 activities in simulation, spanning a range of everyday household chores such as cleaning, maintenance, and food preparation. These activities are designed to be realistic, diverse, and complex, aiming to reproduce the challenges that agents must face in the real world. Building such a benchmark poses three fundamental difficulties for each activity: definition (it can differ by time, place, or person), instantiation in a simulator, and evaluation. BEHAVIOR addresses these with three innovations. First, we propose an object-centric, predicate logic-based description language for expressing an activity's initial and goal conditions, enabling generation of diverse instances for any activity. Second, we identify the simulator-agnostic features required by an underlying environment to support BEHAVIOR, and demonstrate its realization in one such simulator. Third, we introduce a set of metrics to measure task progress and efficiency, absolute and relative to human demonstrators. We include 500 human demonstrations in virtual reality (VR) to serve as the human ground truth. Our experiments demonstrate that even state of the art embodied AI solutions struggle with the level of realism, diversity, and complexity imposed by the activities in our benchmark. We make BEHAVIOR publicly available at behavior.stanford.edu to facilitate and calibrate the development of new embodied AI solutions.