 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeiGibson 2.0: Object-Centric Simulation for Robot Learning of Everyday Household Tasks
Aug 10, 2021



Recent research in embodied AI has been boosted by the use of simulation environments to develop and train robot learning approaches. However, the use of simulation has skewed the attention to tasks that only require what robotics simulators can simulate: motion and physical contact. We present iGibson 2.0, an open-source simulation environment that supports the simulation of a more diverse set of household tasks through three key innovations. First, iGibson 2.0 supports object states, including temperature, wetness level, cleanliness level, and toggled and sliced states, necessary to cover a wider range of tasks. Second, iGibson 2.0 implements a set of predicate logic functions that map the simulator states to logic states like Cooked or Soaked. Additionally, given a logic state, iGibson 2.0 can sample valid physical states that satisfy it. This functionality can generate potentially infinite instances of tasks with minimal effort from the users. The sampling mechanism allows our scenes to be more densely populated with small objects in semantically meaningful locations. Third, iGibson 2.0 includes a virtual reality (VR) interface to immerse humans in its scenes to collect demonstrations. As a result, we can collect demonstrations from humans on these new types of tasks, and use them for imitation learning. We evaluate the new capabilities of iGibson 2.0 to enable robot learning of novel tasks, in the hope of demonstrating the potential of this new simulator to support new research in embodied AI. iGibson 2.0 and its new dataset will be publicly available at http://svl.stanford.edu/igibson/.
BEHAVIOR: Benchmark for Everyday Household Activities in Virtual, Interactive, and Ecological Environments
Aug 06, 2021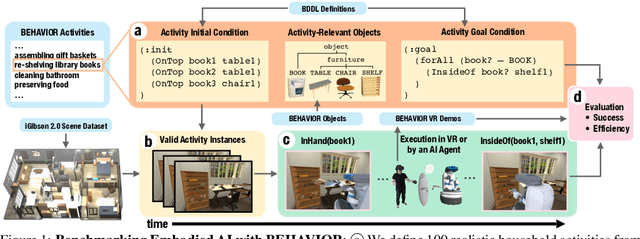
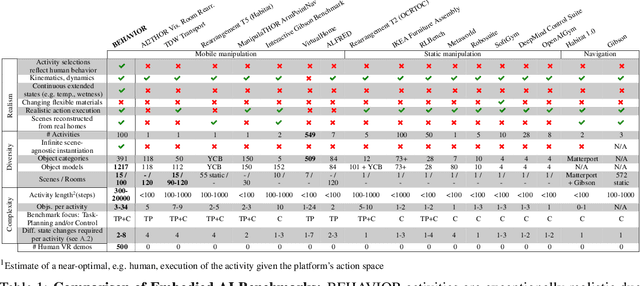
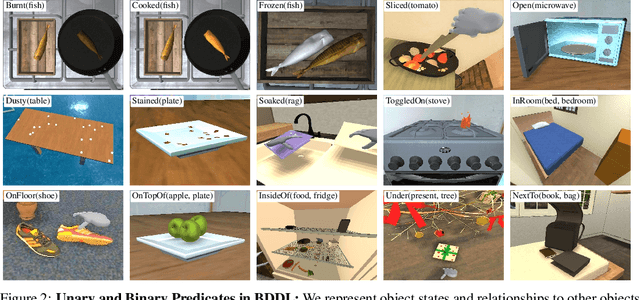
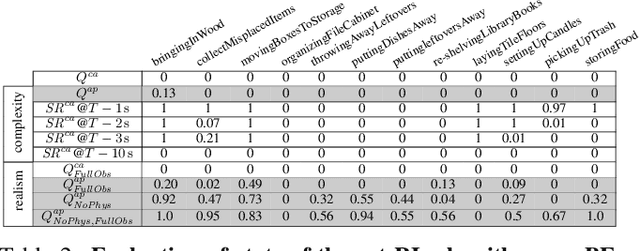
We introduce BEHAVIOR, a benchmark for embodied AI with 100 activities in simulation, spanning a range of everyday household chores such as cleaning, maintenance, and food preparation. These activities are designed to be realistic, diverse, and complex, aiming to reproduce the challenges that agents must face in the real world. Building such a benchmark poses three fundamental difficulties for each activity: definition (it can differ by time, place, or person), instantiation in a simulator, and evaluation. BEHAVIOR addresses these with three innovations. First, we propose an object-centric, predicate logic-based description language for expressing an activity's initial and goal conditions, enabling generation of diverse instances for any activity. Second, we identify the simulator-agnostic features required by an underlying environment to support BEHAVIOR, and demonstrate its realization in one such simulator. Third, we introduce a set of metrics to measure task progress and efficiency, absolute and relative to human demonstrators. We include 500 human demonstrations in virtual reality (VR) to serve as the human ground truth. Our experiments demonstrate that even state of the art embodied AI solutions struggle with the level of realism, diversity, and complexity imposed by the activities in our benchmark. We make BEHAVIOR publicly available at behavior.stanford.edu to facilitate and calibrate the development of new embodied AI solutions.
iGibson, a Simulation Environment for Interactive Tasks in Large Realistic Scenes
Dec 08, 2020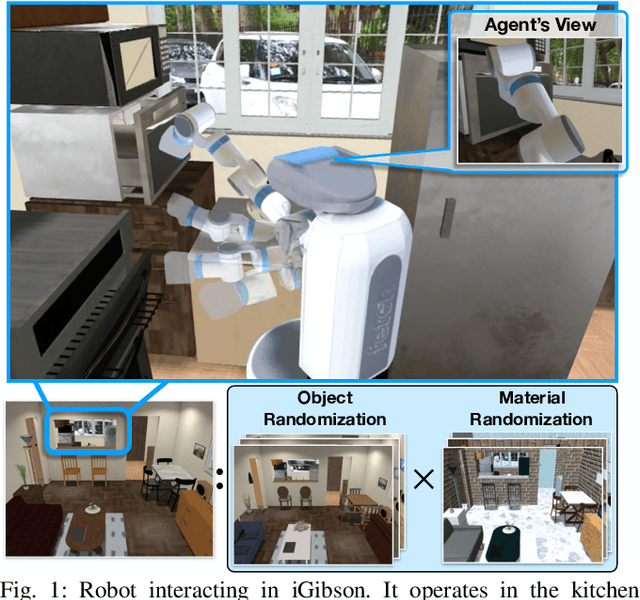
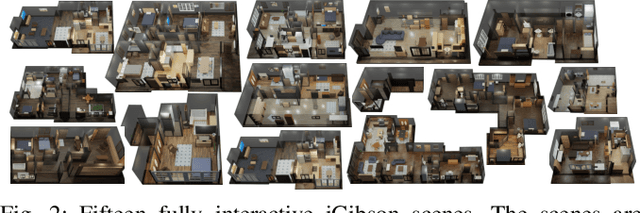
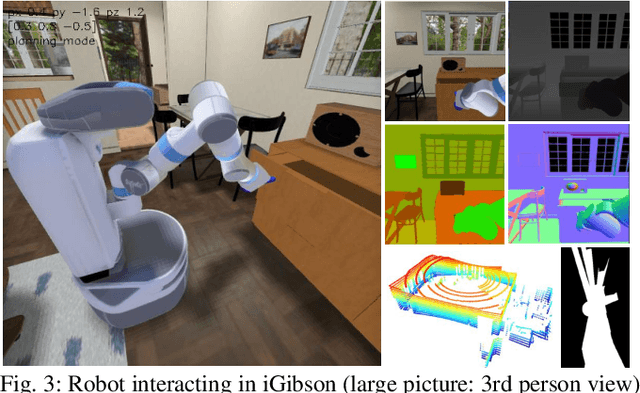
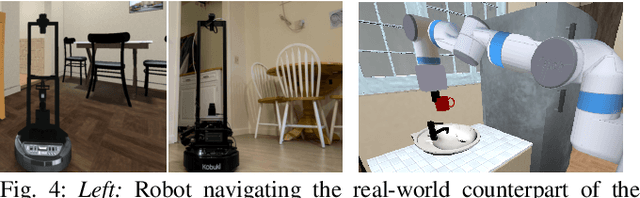
We present iGibson, a novel simulation environment to develop robotic solutions for interactive tasks in large-scale realistic scenes. Our environment contains fifteen fully interactive home-sized scenes populated with rigid and articulated objects. The scenes are replicas of 3D scanned real-world homes, aligning the distribution of objects and layout to that of the real world. iGibson integrates several key features to facilitate the study of interactive tasks: i) generation of high-quality visual virtual sensor signals (RGB, depth, segmentation, LiDAR, flow, among others), ii) domain randomization to change the materials of the objects (both visual texture and dynamics) and/or their shapes, iii) integrated sampling-based motion planners to generate collision-free trajectories for robot bases and arms, and iv) intuitive human-iGibson interface that enables efficient collection of human demonstrations. Through experiments, we show that the full interactivity of the scenes enables agents to learn useful visual representations that accelerate the training of downstream manipulation tasks. We also show that iGibson features enable the generalization of navigation agents, and that the human-iGibson interface and integrated motion planners facilitate efficient imitation learning of simple human demonstrated behaviors. iGibson is open-sourced with comprehensive examples and documentation. For more information, visit our project website: http://svl.stanford.edu/igibson/