 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboCade: Gamifying Robot Data Collection
Dec 24, 2025Imitation learning from human demonstrations has become a dominant approach for training autonomous robot policies. However, collecting demonstration datasets is costly: it often requires access to robots and needs sustained effort in a tedious, long process. These factors limit the scale of data available for training policies. We aim to address this scalability challenge by involving a broader audience in a gamified data collection experience that is both accessible and motivating. Specifically, we develop a gamified remote teleoperation platform, RoboCade, to engage general users in collecting data that is beneficial for downstream policy training. To do this, we embed gamification strategies into the design of the system interface and data collection tasks. In the system interface, we include components such as visual feedback, sound effects, goal visualizations, progress bars, leaderboards, and badges. We additionally propose principles for constructing gamified tasks that have overlapping structure with useful downstream target tasks. We instantiate RoboCade on three manipulation tasks -- including spatial arrangement, scanning, and insertion. To illustrate the viability of gamified robot data collection, we collect a demonstration dataset through our platform, and show that co-training robot policies with this data can improve success rate on non-gamified target tasks (+16-56%). Further, we conduct a user study to validate that novice users find the gamified platform significantly more enjoyable than a standard non-gamified platform (+24%). These results highlight the promise of gamified data collection as a scalable, accessible, and engaging method for collecting demonstration data.
Instance Segmentation of Scene Sketches Using Natural Image Priors
Feb 13, 2025
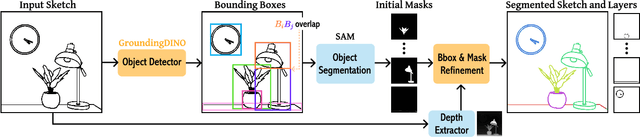
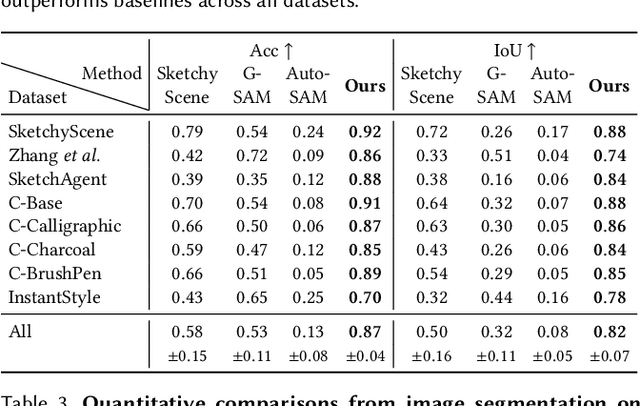
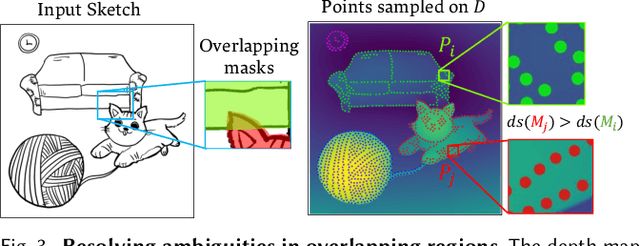
Sketch segmentation involves grouping pixels within a sketch that belong to the same object or instance. It serves as a valuable tool for sketch editing tasks, such as moving, scaling, or removing specific components. While image segmentation models have demonstrated remarkable capabilities in recent years, sketches present unique challenges for these models due to their sparse nature and wide variation in styles. We introduce SketchSeg, a method for instance segmentation of raster scene sketches. Our approach adapts state-of-the-art image segmentation and object detection models to the sketch domain by employing class-agnostic fine-tuning and refining segmentation masks using depth cues. Furthermore, our method organizes sketches into sorted layers, where occluded instances are inpainted, enabling advanced sketch editing applications. As existing datasets in this domain lack variation in sketch styles, we construct a synthetic scene sketch segmentation dataset featuring sketches with diverse brush strokes and varying levels of detail. We use this dataset to demonstrate the robustness of our approach and will release it to promote further research in the field. Project webpage: https://sketchseg.github.io/sketch-seg/
ShapeCraft: Body-Aware and Semantics-Aware 3D Object Design
Dec 05, 2024



For designing a wide range of everyday objects, the design process should be aware of both the human body and the underlying semantics of the design specification. However, these two objectives present significant challenges to the current AI-based designing tools. In this work, we present a method to synthesize body-aware 3D objects from a base mesh given an input body geometry and either text or image as guidance. The generated objects can be simulated on virtual characters, or fabricated for real-world use. We propose to use a mesh deformation procedure that optimizes for both semantic alignment as well as contact and penetration losses. Using our method, users can generate both virtual or real-world objects from text, image, or sketch, without the need for manual artist intervention. We present both qualitative and quantitative results on various object categories, demonstrating the effectiveness of our approach.
Block and Detail: Scaffolding Sketch-to-Image Generation
Feb 28, 2024We introduce a novel sketch-to-image tool that aligns with the iterative refinement process of artists. Our tool lets users sketch blocking strokes to coarsely represent the placement and form of objects and detail strokes to refine their shape and silhouettes. We develop a two-pass algorithm for generating high-fidelity images from such sketches at any point in the iterative process. In the first pass we use a ControlNet to generate an image that strictly follows all the strokes (blocking and detail) and in the second pass we add variation by renoising regions surrounding blocking strokes. We also present a dataset generation scheme that, when used to train a ControlNet architecture, allows regions that do not contain strokes to be interpreted as not-yet-specified regions rather than empty space. We show that this partial-sketch-aware ControlNet can generate coherent elements from partial sketches that only contain a small number of strokes. The high-fidelity images produced by our approach serve as scaffolds that can help the user adjust the shape and proportions of objects or add additional elements to the composition. We demonstrate the effectiveness of our approach with a variety of examples and evaluative comparisons.