 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Ball: Composing Policies for Long-Horizon Basketball Moves
Sep 26, 2025
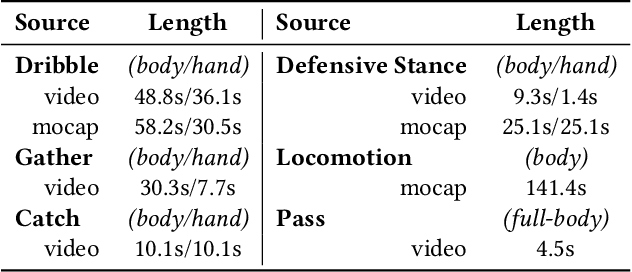
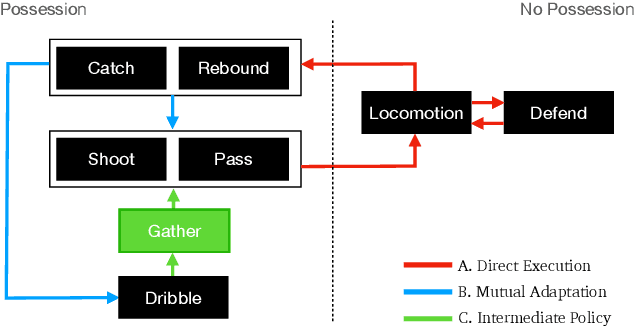

Learning a control policy for a multi-phase, long-horizon task, such as basketball maneuvers, remains challenging for reinforcement learning approaches due to the need for seamless policy composition and transitions between skills. A long-horizon task typically consists of distinct subtasks with well-defined goals, separated by transitional subtasks with unclear goals but critical to the success of the entire task. Existing methods like the mixture of experts and skill chaining struggle with tasks where individual policies do not share significant commonly explored states or lack well-defined initial and terminal states between different phases. In this paper, we introduce a novel policy integration framework to enable the composition of drastically different motor skills in multi-phase long-horizon tasks with ill-defined intermediate states. Based on that, we further introduce a high-level soft router to enable seamless and robust transitions between the subtasks. We evaluate our framework on a set of fundamental basketball skills and challenging transitions. Policies trained by our approach can effectively control the simulated character to interact with the ball and accomplish the long-horizon task specified by real-time user commands, without relying on ball trajectory references.
* ACM Transactions on Graphics (Proceedings of SIGGRAPH Asia 2025). Website: http://pei-xu.github.io/basketball. Video: https://youtu.be/2RBFIjjmR2I. Code: https://github.com/xupei0610/basketball
Self-Generated In-Context Examples Improve LLM Agents for Sequential Decision-Making Tasks
May 02, 2025Many methods for improving Large Language Model (LLM) agents for sequential decision-making tasks depend on task-specific knowledge engineering--such as prompt tuning, curated in-context examples, or customized observation and action spaces. Using these approaches, agent performance improves with the quality or amount of knowledge engineering invested. Instead, we investigate how LLM agents can automatically improve their performance by learning in-context from their own successful experiences on similar tasks. Rather than relying on task-specific knowledge engineering, we focus on constructing and refining a database of self-generated examples. We demonstrate that even a naive accumulation of successful trajectories across training tasks boosts test performance on three benchmarks: ALFWorld (73% to 89%), Wordcraft (55% to 64%), and InterCode-SQL (75% to 79%)--matching the performance the initial agent achieves if allowed two to three attempts per task. We then introduce two extensions: (1) database-level selection through population-based training to identify high-performing example collections, and (2) exemplar-level selection that retains individual trajectories based on their empirical utility as in-context examples. These extensions further enhance performance, achieving 91% on ALFWorld--matching more complex approaches that employ task-specific components and prompts. Our results demonstrate that automatic trajectory database construction offers a compelling alternative to labor-intensive knowledge engineering.
Automated Rewards via LLM-Generated Progress Functions
Oct 11, 2024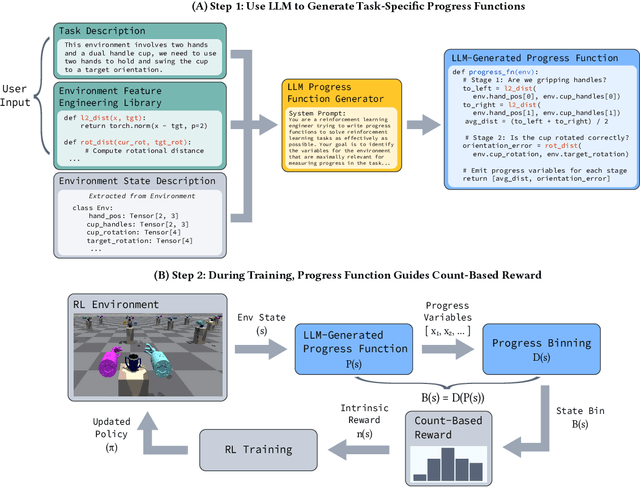
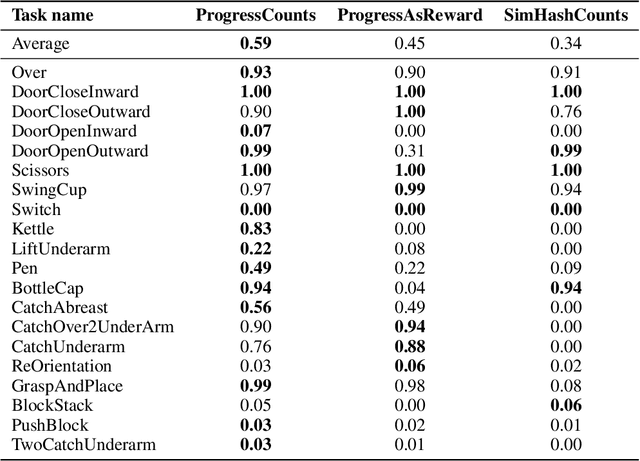
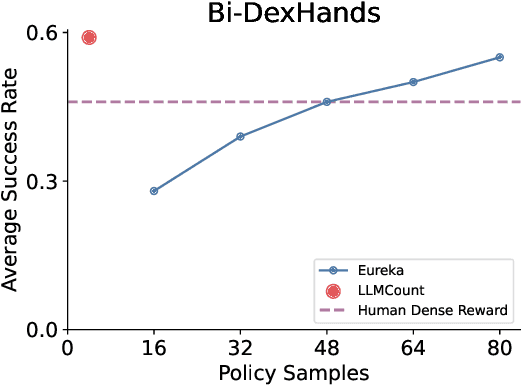

Large Language Models (LLMs) have the potential to automate reward engineering by leveraging their broad domain knowledge across various tasks. However, they often need many iterations of trial-and-error to generate effective reward functions. This process is costly because evaluating every sampled reward function requires completing the full policy optimization process for each function. In this paper, we introduce an LLM-driven reward generation framework that is able to produce state-of-the-art policies on the challenging Bi-DexHands benchmark \textbf{with 20$\times$ fewer reward function samples} than the prior state-of-the-art work. Our key insight is that we reduce the problem of generating task-specific rewards to the problem of coarsely estimating \emph{task progress}. Our two-step solution leverages the task domain knowledge and the code synthesis abilities of LLMs to author \emph{progress functions} that estimate task progress from a given state. Then, we use this notion of progress to discretize states, and generate count-based intrinsic rewards using the low-dimensional state space. We show that the combination of LLM-generated progress functions and count-based intrinsic rewards is essential for our performance gains, while alternatives such as generic hash-based counts or using progress directly as a reward function fall short.
Learning to Move Like Professional Counter-Strike Players
Aug 25, 2024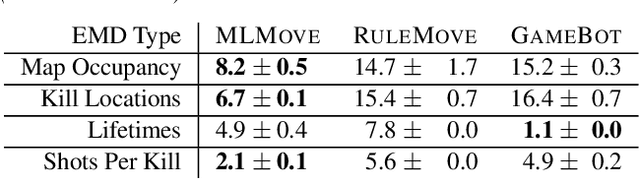
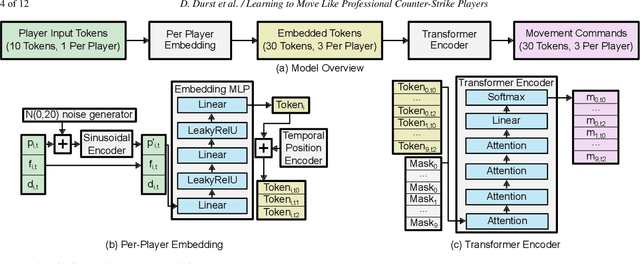
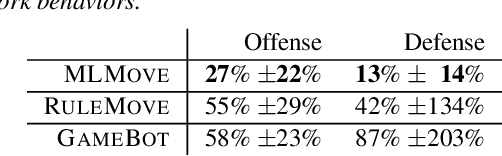
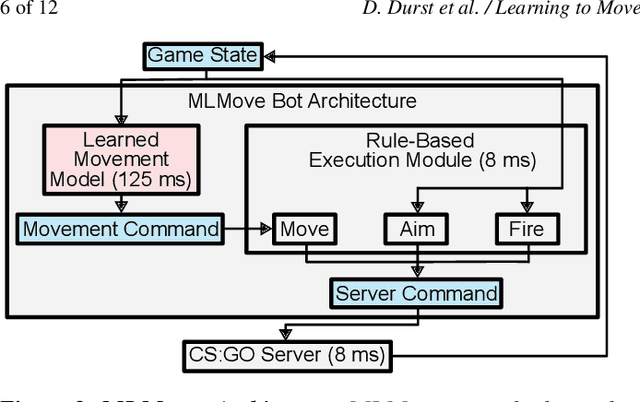
In multiplayer, first-person shooter games like Counter-Strike: Global Offensive (CS:GO), coordinated movement is a critical component of high-level strategic play. However, the complexity of team coordination and the variety of conditions present in popular game maps make it impractical to author hand-crafted movement policies for every scenario. We show that it is possible to take a data-driven approach to creating human-like movement controllers for CS:GO. We curate a team movement dataset comprising 123 hours of professional game play traces, and use this dataset to train a transformer-based movement model that generates human-like team movement for all players in a "Retakes" round of the game. Importantly, the movement prediction model is efficient. Performing inference for all players takes less than 0.5 ms per game step (amortized cost) on a single CPU core, making it plausible for use in commercial games today. Human evaluators assess that our model behaves more like humans than both commercially-available bots and procedural movement controllers scripted by experts (16% to 59% higher by TrueSkill rating of "human-like"). Using experiments involving in-game bot vs. bot self-play, we demonstrate that our model performs simple forms of teamwork, makes fewer common movement mistakes, and yields movement distributions, player lifetimes, and kill locations similar to those observed in professional CS:GO match play.
* The project website is at https://davidbdurst.com/mlmove/
Block and Detail: Scaffolding Sketch-to-Image Generation
Feb 28, 2024We introduce a novel sketch-to-image tool that aligns with the iterative refinement process of artists. Our tool lets users sketch blocking strokes to coarsely represent the placement and form of objects and detail strokes to refine their shape and silhouettes. We develop a two-pass algorithm for generating high-fidelity images from such sketches at any point in the iterative process. In the first pass we use a ControlNet to generate an image that strictly follows all the strokes (blocking and detail) and in the second pass we add variation by renoising regions surrounding blocking strokes. We also present a dataset generation scheme that, when used to train a ControlNet architecture, allows regions that do not contain strokes to be interpreted as not-yet-specified regions rather than empty space. We show that this partial-sketch-aware ControlNet can generate coherent elements from partial sketches that only contain a small number of strokes. The high-fidelity images produced by our approach serve as scaffolds that can help the user adjust the shape and proportions of objects or add additional elements to the composition. We demonstrate the effectiveness of our approach with a variety of examples and evaluative comparisons.
Collage Diffusion
Mar 01, 2023



Text-conditional diffusion models generate high-quality, diverse images. However, text is often an ambiguous specification for a desired target image, creating the need for additional user-friendly controls for diffusion-based image generation. We focus on having precise control over image output for scenes with several objects. Users control image generation by defining a collage: a text prompt paired with an ordered sequence of layers, where each layer is an RGBA image and a corresponding text prompt. We introduce Collage Diffusion, a collage-conditional diffusion algorithm that allows users to control both the spatial arrangement and visual attributes of objects in the scene, and also enables users to edit individual components of generated images. To ensure that different parts of the input text correspond to the various locations specified in the input collage layers, Collage Diffusion modifies text-image cross-attention with the layers' alpha masks. To maintain characteristics of individual collage layers that are not specified in text, Collage Diffusion learns specialized text representations per layer. Collage input also enables layer-based controls that provide fine-grained control over the final output: users can control image harmonization on a layer-by-layer basis, and they can edit individual objects in generated images while keeping other objects fixed. Collage-conditional image generation requires harmonizing the input collage to make objects fit together--the key challenge involves minimizing changes in the positions and key visual attributes of objects in the input collage while allowing other attributes of the collage to change in the harmonization process. By leveraging the rich information present in layer input, Collage Diffusion generates globally harmonized images that maintain desired object locations and visual characteristics better than prior approaches.
Low-Shot Validation: Active Importance Sampling for Estimating Classifier Performance on Rare Categories
Sep 13, 2021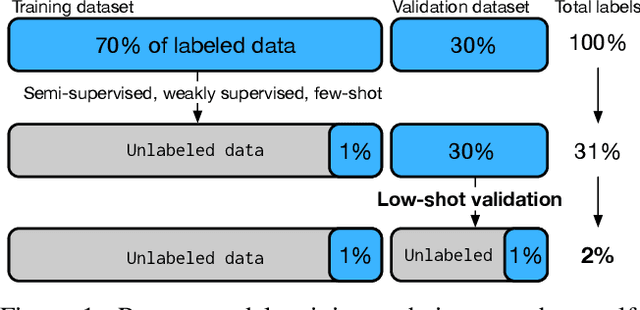
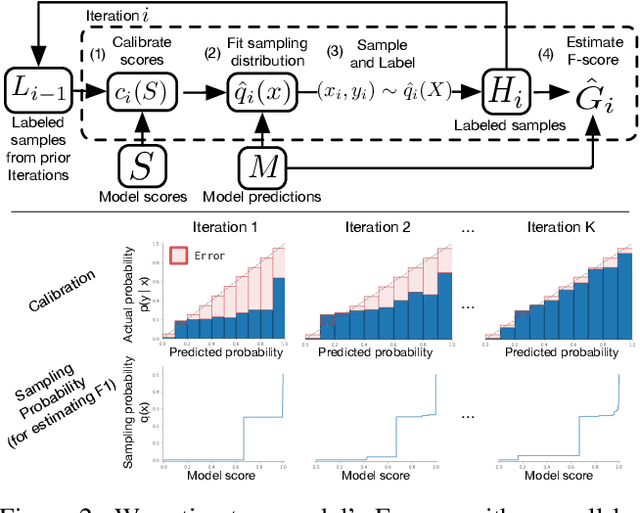
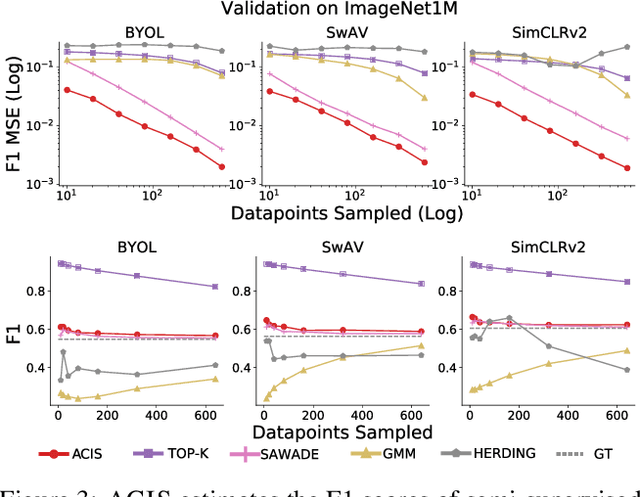
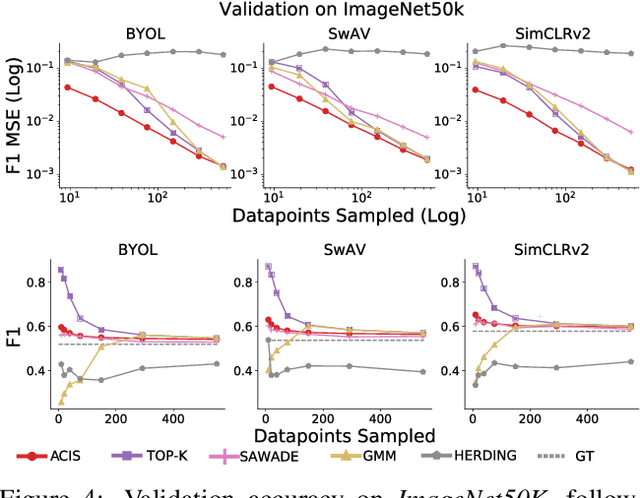
For machine learning models trained with limited labeled training data, validation stands to become the main bottleneck to reducing overall annotation costs. We propose a statistical validation algorithm that accurately estimates the F-score of binary classifiers for rare categories, where finding relevant examples to evaluate on is particularly challenging. Our key insight is that simultaneous calibration and importance sampling enables accurate estimates even in the low-sample regime (< 300 samples). Critically, we also derive an accurate single-trial estimator of the variance of our method and demonstrate that this estimator is empirically accurate at low sample counts, enabling a practitioner to know how well they can trust a given low-sample estimate. When validating state-of-the-art semi-supervised models on ImageNet and iNaturalist2017, our method achieves the same estimates of model performance with up to 10x fewer labels than competing approaches. In particular, we can estimate model F1 scores with a variance of 0.005 using as few as 100 labels.
Cloud Removal in Satellite Images Using Spatiotemporal Generative Networks
Dec 14, 2019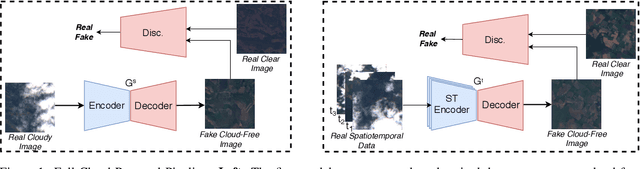
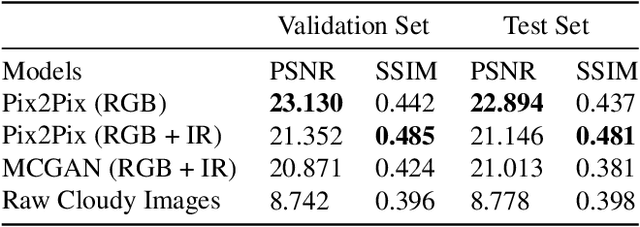
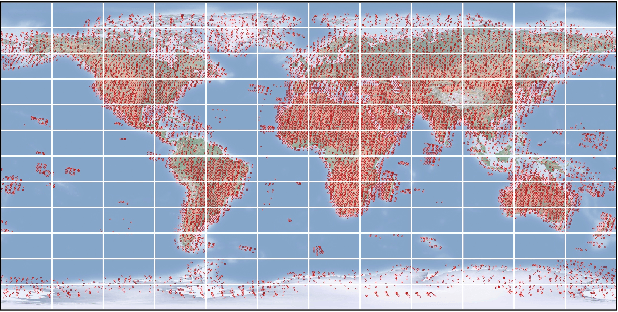
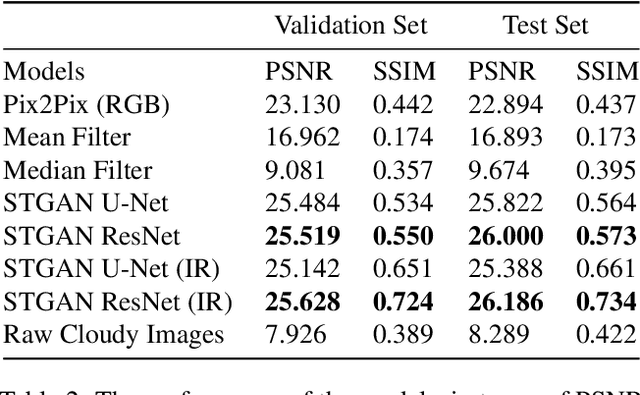
Satellite images hold great promise for continuous environmental monitoring and earth observation. Occlusions cast by clouds, however, can severely limit coverage, making ground information extraction more difficult. Existing pipelines typically perform cloud removal with simple temporal composites and hand-crafted filters. In contrast, we cast the problem of cloud removal as a conditional image synthesis challenge, and we propose a trainable spatiotemporal generator network (STGAN) to remove clouds. We train our model on a new large-scale spatiotemporal dataset that we construct, containing 97640 image pairs covering all continents. We demonstrate experimentally that the proposed STGAN model outperforms standard models and can generate realistic cloud-free images with high PSNR and SSIM values across a variety of atmospheric conditions, leading to improved performance in downstream tasks such as land cover classification.