 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEVA: Efficient Reinforcement Learning for End-to-End Video Agent
Mar 24, 2026Video understanding with multimodal large language models (MLLMs) remains challenging due to the long token sequences of videos, which contain extensive temporal dependencies and redundant frames. Existing approaches typically treat MLLMs as passive recognizers, processing entire videos or uniformly sampled frames without adaptive reasoning. Recent agent-based methods introduce external tools, yet still depend on manually designed workflows and perception-first strategies, resulting in inefficiency on long videos. We present EVA, an Efficient Reinforcement Learning framework for End-to-End Video Agent, which enables planning-before-perception through iterative summary-plan-action-reflection reasoning. EVA autonomously decides what to watch, when to watch, and how to watch, achieving query-driven and efficient video understanding. To train such agents, we design a simple yet effective three-stage learning pipeline - comprising supervised fine-tuning (SFT), Kahneman-Tversky Optimization (KTO), and Generalized Reward Policy Optimization (GRPO) - that bridges supervised imitation and reinforcement learning. We further construct high-quality datasets for each stage, supporting stable and reproducible training. We evaluate EVA on six video understanding benchmarks, demonstrating its comprehensive capabilities. Compared with existing baselines, EVA achieves a substantial improvement of 6-12% over general MLLM baselines and a further 1-3% gain over prior adaptive agent methods. Our code and model are available at https://github.com/wangruohui/EfficientVideoAgent.
ACPO: Counteracting Likelihood Displacement in Vision-Language Alignment with Asymmetric Constraints
Mar 23, 2026While Direct Preference Optimization (DPO) has become the de facto approach for aligning Large Vision-Language Models (LVLMs), it suffers from Likelihood Displacement, where the probability of both chosen and rejected responses collapses. This optimization flaw is especially detrimental in multimodal settings: the erosion of chosen likelihoods -- a failure we term Visual Anchor Collapse -- causes models to abandon visual evidence for strong language priors, precipitating significant hallucinations. To address this, we propose Asymmetric Constrained Preference Optimization (ACPO), a modality-agnostic alignment mechanism that applies dynamic, target-oriented scaling to preference optimization. ACPO derives a complexity-aware scaling coefficient applied exclusively to the rejected reward, asymmetrically suppressing the gradient flow on the rejected term while preserving the chosen distribution as a gradient-stable reference. While fundamentally a general-purpose objective, breaking this gradient symmetry is crucial for multimodal tasks, as it mitigates the suppression of visual tokens by language priors. Experiments on InternVL models demonstrate that ACPO effectively reverses the chosen-reward degradation of standard DPO. By halting Visual Anchor Collapse, ACPO generally outperforms baselines on hallucination benchmarks (HallusionBench, MM-IFEval) and general leaderboards (MMBench, MMStar, OCRBenchV2) while driving concurrent improvements in general capabilities.
SenseNova-MARS: Empowering Multimodal Agentic Reasoning and Search via Reinforcement Learning
Dec 30, 2025While Vision-Language Models (VLMs) can solve complex tasks through agentic reasoning, their capabilities remain largely constrained to text-oriented chain-of-thought or isolated tool invocation. They fail to exhibit the human-like proficiency required to seamlessly interleave dynamic tool manipulation with continuous reasoning, particularly in knowledge-intensive and visually complex scenarios that demand coordinated external tools such as search and image cropping. In this work, we introduce SenseNova-MARS, a novel Multimodal Agentic Reasoning and Search framework that empowers VLMs with interleaved visual reasoning and tool-use capabilities via reinforcement learning (RL). Specifically, SenseNova-MARS dynamically integrates the image search, text search, and image crop tools to tackle fine-grained and knowledge-intensive visual understanding challenges. In the RL stage, we propose the Batch-Normalized Group Sequence Policy Optimization (BN-GSPO) algorithm to improve the training stability and advance the model's ability to invoke tools and reason effectively. To comprehensively evaluate the agentic VLMs on complex visual tasks, we introduce the HR-MMSearch benchmark, the first search-oriented benchmark composed of high-resolution images with knowledge-intensive and search-driven questions. Experiments demonstrate that SenseNova-MARS achieves state-of-the-art performance on open-source search and fine-grained image understanding benchmarks. Specifically, on search-oriented benchmarks, SenseNova-MARS-8B scores 67.84 on MMSearch and 41.64 on HR-MMSearch, surpassing proprietary models such as Gemini-3-Flash and GPT-5. SenseNova-MARS represents a promising step toward agentic VLMs by providing effective and robust tool-use capabilities. To facilitate further research in this field, we will release all code, models, and datasets.
Scaling Spatial Intelligence with Multimodal Foundation Models
Nov 17, 2025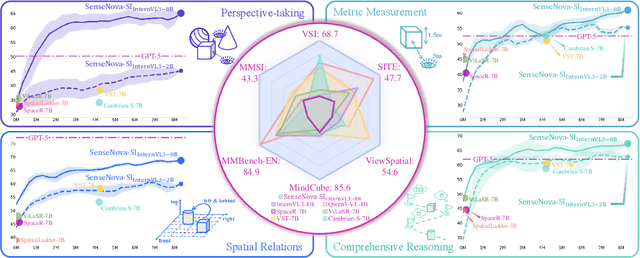
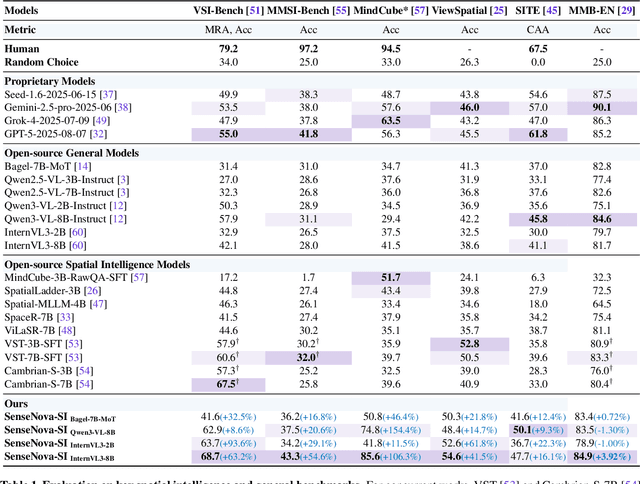
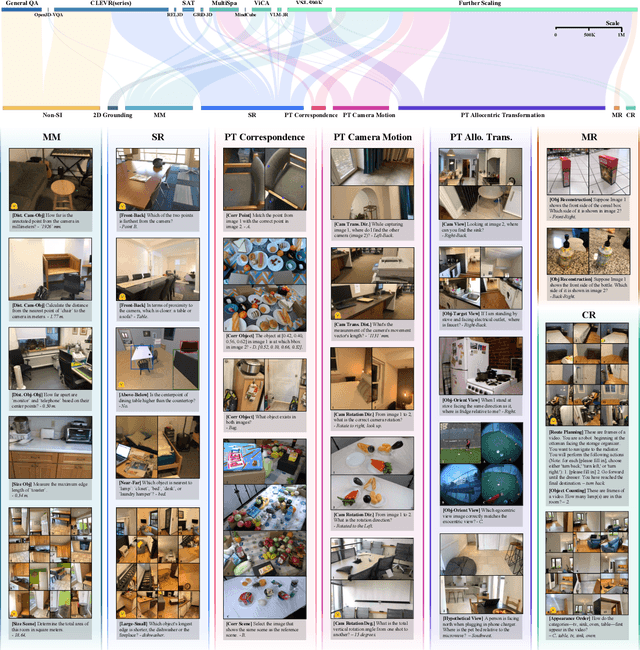
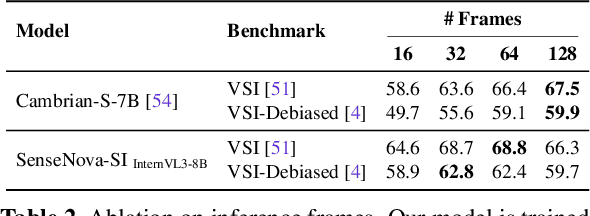
Despite remarkable progress, multimodal foundation models still exhibit surprising deficiencies in spatial intelligence. In this work, we explore scaling up multimodal foundation models to cultivate spatial intelligence within the SenseNova-SI family, built upon established multimodal foundations including visual understanding models (i.e., Qwen3-VL and InternVL3) and unified understanding and generation models (i.e., Bagel). We take a principled approach to constructing high-performing and robust spatial intelligence by systematically curating SenseNova-SI-8M: eight million diverse data samples under a rigorous taxonomy of spatial capabilities. SenseNova-SI demonstrates unprecedented performance across a broad range of spatial intelligence benchmarks: 68.7% on VSI-Bench, 43.3% on MMSI, 85.6% on MindCube, 54.6% on ViewSpatial, and 50.1% on SITE, while maintaining strong general multimodal understanding (e.g., 84.9% on MMBench-En). More importantly, we analyze the impact of data scaling, discuss early signs of emergent generalization capabilities enabled by diverse data training, analyze the risk of overfitting and language shortcuts, present a preliminary study on spatial chain-of-thought reasoning, and validate the potential downstream application. SenseNova-SI is an ongoing project, and this report will be updated continuously. All newly trained multimodal foundation models are publicly released to facilitate further research in this direction.
From Pixels to Words -- Towards Native Vision-Language Primitives at Scale
Oct 16, 2025The edifice of native Vision-Language Models (VLMs) has emerged as a rising contender to typical modular VLMs, shaped by evolving model architectures and training paradigms. Yet, two lingering clouds cast shadows over its widespread exploration and promotion: (-) What fundamental constraints set native VLMs apart from modular ones, and to what extent can these barriers be overcome? (-) How to make research in native VLMs more accessible and democratized, thereby accelerating progress in the field. In this paper, we clarify these challenges and outline guiding principles for constructing native VLMs. Specifically, one native VLM primitive should: (i) effectively align pixel and word representations within a shared semantic space; (ii) seamlessly integrate the strengths of formerly separate vision and language modules; (iii) inherently embody various cross-modal properties that support unified vision-language encoding, aligning, and reasoning. Hence, we launch NEO, a novel family of native VLMs built from first principles, capable of rivaling top-tier modular counterparts across diverse real-world scenarios. With only 390M image-text examples, NEO efficiently develops visual perception from scratch while mitigating vision-language conflicts inside a dense and monolithic model crafted from our elaborate primitives. We position NEO as a cornerstone for scalable and powerful native VLMs, paired with a rich set of reusable components that foster a cost-effective and extensible ecosystem. Our code and models are publicly available at: https://github.com/EvolvingLMMs-Lab/NEO.
Has GPT-5 Achieved Spatial Intelligence? An Empirical Study
Aug 18, 2025



Multi-modal models have achieved remarkable progress in recent years. Nevertheless, they continue to exhibit notable limitations in spatial understanding and reasoning, which are fundamental capabilities to achieving artificial general intelligence. With the recent release of GPT-5, allegedly the most powerful AI model to date, it is timely to examine where the leading models stand on the path toward spatial intelligence. First, we propose a comprehensive taxonomy of spatial tasks that unifies existing benchmarks and discuss the challenges in ensuring fair evaluation. We then evaluate state-of-the-art proprietary and open-source models on eight key benchmarks, at a cost exceeding one billion total tokens. Our empirical study reveals that (1) GPT-5 demonstrates unprecedented strength in spatial intelligence, yet (2) still falls short of human performance across a broad spectrum of tasks. Moreover, we (3) identify the more challenging spatial intelligence problems for multi-modal models, and (4) proprietary models do not exhibit a decisive advantage when facing the most difficult problems. In addition, we conduct a qualitative evaluation across a diverse set of scenarios that are intuitive for humans yet fail even the most advanced multi-modal models.
HCRMP: A LLM-Hinted Contextual Reinforcement Learning Framework for Autonomous Driving
May 21, 2025



Integrating Large Language Models (LLMs) with Reinforcement Learning (RL) can enhance autonomous driving (AD) performance in complex scenarios. However, current LLM-Dominated RL methods over-rely on LLM outputs, which are prone to hallucinations.Evaluations show that state-of-the-art LLM indicates a non-hallucination rate of only approximately 57.95% when assessed on essential driving-related tasks. Thus, in these methods, hallucinations from the LLM can directly jeopardize the performance of driving policies. This paper argues that maintaining relative independence between the LLM and the RL is vital for solving the hallucinations problem. Consequently, this paper is devoted to propose a novel LLM-Hinted RL paradigm. The LLM is used to generate semantic hints for state augmentation and policy optimization to assist RL agent in motion planning, while the RL agent counteracts potential erroneous semantic indications through policy learning to achieve excellent driving performance. Based on this paradigm, we propose the HCRMP (LLM-Hinted Contextual Reinforcement Learning Motion Planner) architecture, which is designed that includes Augmented Semantic Representation Module to extend state space. Contextual Stability Anchor Module enhances the reliability of multi-critic weight hints by utilizing information from the knowledge base. Semantic Cache Module is employed to seamlessly integrate LLM low-frequency guidance with RL high-frequency control. Extensive experiments in CARLA validate HCRMP's strong overall driving performance. HCRMP achieves a task success rate of up to 80.3% under diverse driving conditions with different traffic densities. Under safety-critical driving conditions, HCRMP significantly reduces the collision rate by 11.4%, which effectively improves the driving performance in complex scenarios.
M2DA: Multi-Modal Fusion Transformer Incorporating Driver Attention for Autonomous Driving
Mar 19, 2024End-to-end autonomous driving has witnessed remarkable progress. However, the extensive deployment of autonomous vehicles has yet to be realized, primarily due to 1) inefficient multi-modal environment perception: how to integrate data from multi-modal sensors more efficiently; 2) non-human-like scene understanding: how to effectively locate and predict critical risky agents in traffic scenarios like an experienced driver. To overcome these challenges, in this paper, we propose a Multi-Modal fusion transformer incorporating Driver Attention (M2DA) for autonomous driving. To better fuse multi-modal data and achieve higher alignment between different modalities, a novel Lidar-Vision-Attention-based Fusion (LVAFusion) module is proposed. By incorporating driver attention, we empower the human-like scene understanding ability to autonomous vehicles to identify crucial areas within complex scenarios precisely and ensure safety. We conduct experiments on the CARLA simulator and achieve state-of-the-art performance with less data in closed-loop benchmarks. Source codes are available at https://anonymous.4open.science/r/M2DA-4772.
DriveMLM: Aligning Multi-Modal Large Language Models with Behavioral Planning States for Autonomous Driving
Dec 25, 2023
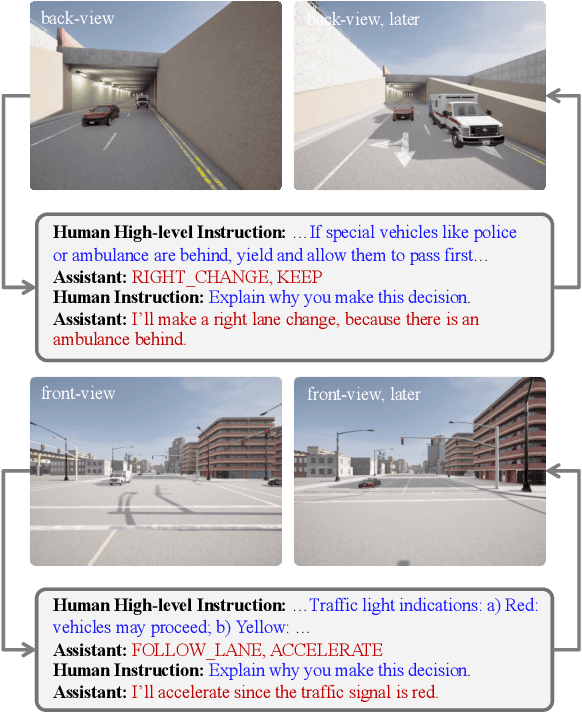
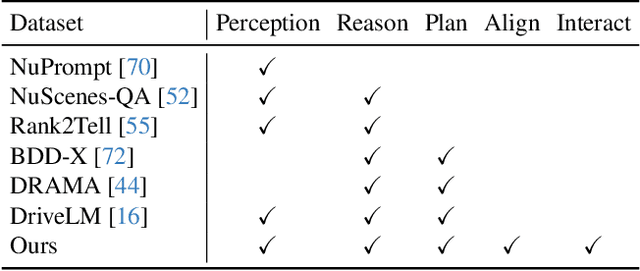
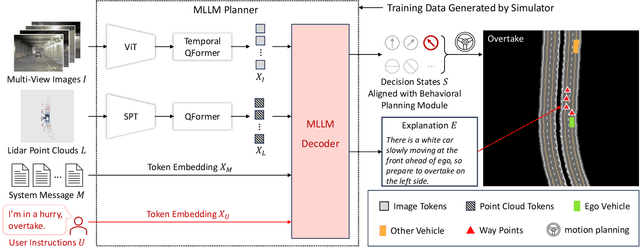
Large language models (LLMs) have opened up new possibilities for intelligent agents, endowing them with human-like thinking and cognitive abilities. In this work, we delve into the potential of large language models (LLMs) in autonomous driving (AD). We introduce DriveMLM, an LLM-based AD framework that can perform close-loop autonomous driving in realistic simulators. To this end, (1) we bridge the gap between the language decisions and the vehicle control commands by standardizing the decision states according to the off-the-shelf motion planning module. (2) We employ a multi-modal LLM (MLLM) to model the behavior planning module of a module AD system, which uses driving rules, user commands, and inputs from various sensors (e.g., camera, lidar) as input and makes driving decisions and provide explanations; This model can plug-and-play in existing AD systems such as Apollo for close-loop driving. (3) We design an effective data engine to collect a dataset that includes decision state and corresponding explanation annotation for model training and evaluation. We conduct extensive experiments and show that our model achieves 76.1 driving score on the CARLA Town05 Long, and surpasses the Apollo baseline by 4.7 points under the same settings, demonstrating the effectiveness of our model. We hope this work can serve as a baseline for autonomous driving with LLMs. Code and models shall be released at https://github.com/OpenGVLab/DriveMLM.
Scene as Occupancy
Jun 06, 2023Human driver can easily describe the complex traffic scene by visual system. Such an ability of precise perception is essential for driver's planning. To achieve this, a geometry-aware representation that quantizes the physical 3D scene into structured grid map with semantic labels per cell, termed as 3D Occupancy, would be desirable. Compared to the form of bounding box, a key insight behind occupancy is that it could capture the fine-grained details of critical obstacles in the scene, and thereby facilitate subsequent tasks. Prior or concurrent literature mainly concentrate on a single scene completion task, where we might argue that the potential of this occupancy representation might obsess broader impact. In this paper, we propose OccNet, a multi-view vision-centric pipeline with a cascade and temporal voxel decoder to reconstruct 3D occupancy. At the core of OccNet is a general occupancy embedding to represent 3D physical world. Such a descriptor could be applied towards a wide span of driving tasks, including detection, segmentation and planning. To validate the effectiveness of this new representation and our proposed algorithm, we propose OpenOcc, the first dense high-quality 3D occupancy benchmark built on top of nuScenes. Empirical experiments show that there are evident performance gain across multiple tasks, e.g., motion planning could witness a collision rate reduction by 15%-58%, demonstrating the superiority of our method.