 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDemo-JEPA: Joint-Embedding Predictive Architecture for One-shot Cross-Embodiment Imitation
May 20, 2026Robotic imitation learning is often treated as reproducing demonstrated actions, but actions are inherently embodiment-specific. When demonstrations come from humans or robots with different morphology, kinematics, or action spaces, this action-centric view requires shared action spaces, heuristic retargeting, or large-scale multi-embodiment co-training. We instead view demonstrations as implicit specifications of future goals: the target agent should infer what state the demonstrator is trying to realize, rather than how the demonstrator executes it. We propose Demo-JEPA, a cross-embodiment imitation framework that decouples demonstration intent from embodiment-specific execution. Built on a JEPA-based world model, Demo-JEPA translates source visual demonstrations into target-compatible future latent trajectories in a shared predictive representation space. The target agent then uses these latent trajectories as subgoals and realizes them through planning under its own learned forward dynamics. Because Demo-JEPA avoids action-level correspondence and requires only visual demonstrations plus the target agent's own interaction experience, it supports flexible imitation across heterogeneous embodiments. Experiments on RLBench and real-world manipulation tasks show that Demo-JEPA matches specialized in-domain planners and generalizes to unseen tasks and embodiment configurations where prior methods fail.
HEX: Humanoid-Aligned Experts for Cross-Embodiment Whole-Body Manipulation
Apr 09, 2026Humans achieve complex manipulation through coordinated whole-body control, whereas most Vision-Language-Action (VLA) models treat robot body parts largely independently, making high-DoF humanoid control challenging and often unstable. We present HEX, a state-centric framework for coordinated manipulation on full-sized bipedal humanoid robots. HEX introduces a humanoid-aligned universal state representation for scalable learning across heterogeneous embodiments, and incorporates a Mixture-of-Experts Unified Proprioceptive Predictor to model whole-body coordination and temporal motion dynamics from large-scale multi-embodiment trajectory data. To efficiently capture temporal visual context, HEX uses lightweight history tokens to summarize past observations, avoiding repeated encoding of historical images during inference. It further employs a residual-gated fusion mechanism with a flow-matching action head to adaptively integrate visual-language cues with proprioceptive dynamics for action generation. Experiments on real-world humanoid manipulation tasks show that HEX achieves state-of-the-art performance in task success rate and generalization, particularly in fast-reaction and long-horizon scenarios.
URDF-Anything+: Autoregressive Articulated 3D Models Generation for Physical Simulation
Mar 14, 2026Articulated objects are fundamental for robotics, simulation of physics, and interactive virtual environments. However, reconstructing them from visual input remains challenging, as it requires jointly inferring both part geometry and kinematic structure. We present, an end-to-end autoregressive framework that directly generates executable articulated object models from visual observations. Given image and object-level 3D cues, our method sequentially produces part geometries and their associated joint parameters, resulting in complete URDF models without reliance on multi-stage pipelines. The generation proceeds until the model determines that all parts have been produced, automatically inferring complete geometry and kinematics. Building on this capability, we enable a new Real-Follow-Sim paradigm, where high-fidelity digital twins constructed from visual observations allow policies trained and tested purely in simulation to transfer to real robots without online adaptation. Experiments on large-scale articulated object benchmarks and real-world robotic tasks demonstrate that outperforms prior methods in geometric reconstruction quality, joint parameter accuracy, and physical executability.
RoboMIND 2.0: A Multimodal, Bimanual Mobile Manipulation Dataset for Generalizable Embodied Intelligence
Dec 31, 2025While data-driven imitation learning has revolutionized robotic manipulation, current approaches remain constrained by the scarcity of large-scale, diverse real-world demonstrations. Consequently, the ability of existing models to generalize across long-horizon bimanual tasks and mobile manipulation in unstructured environments remains limited. To bridge this gap, we present RoboMIND 2.0, a comprehensive real-world dataset comprising over 310K dual-arm manipulation trajectories collected across six distinct robot embodiments and 739 complex tasks. Crucially, to support research in contact-rich and spatially extended tasks, the dataset incorporates 12K tactile-enhanced episodes and 20K mobile manipulation trajectories. Complementing this physical data, we construct high-fidelity digital twins of our real-world environments, releasing an additional 20K-trajectory simulated dataset to facilitate robust sim-to-real transfer. To fully exploit the potential of RoboMIND 2.0, we propose MIND-2 system, a hierarchical dual-system frame-work optimized via offline reinforcement learning. MIND-2 integrates a high-level semantic planner (MIND-2-VLM) to decompose abstract natural language instructions into grounded subgoals, coupled with a low-level Vision-Language-Action executor (MIND-2-VLA), which generates precise, proprioception-aware motor actions.
WoW: Towards a World omniscient World model Through Embodied Interaction
Sep 26, 2025Humans develop an understanding of intuitive physics through active interaction with the world. This approach is in stark contrast to current video models, such as Sora, which rely on passive observation and therefore struggle with grasping physical causality. This observation leads to our central hypothesis: authentic physical intuition of the world model must be grounded in extensive, causally rich interactions with the real world. To test this hypothesis, we present WoW, a 14-billion-parameter generative world model trained on 2 million robot interaction trajectories. Our findings reveal that the model's understanding of physics is a probabilistic distribution of plausible outcomes, leading to stochastic instabilities and physical hallucinations. Furthermore, we demonstrate that this emergent capability can be actively constrained toward physical realism by SOPHIA, where vision-language model agents evaluate the DiT-generated output and guide its refinement by iteratively evolving the language instructions. In addition, a co-trained Inverse Dynamics Model translates these refined plans into executable robotic actions, thus closing the imagination-to-action loop. We establish WoWBench, a new benchmark focused on physical consistency and causal reasoning in video, where WoW achieves state-of-the-art performance in both human and autonomous evaluation, demonstrating strong ability in physical causality, collision dynamics, and object permanence. Our work provides systematic evidence that large-scale, real-world interaction is a cornerstone for developing physical intuition in AI. Models, data, and benchmarks will be open-sourced.
4D Visual Pre-training for Robot Learning
Aug 24, 2025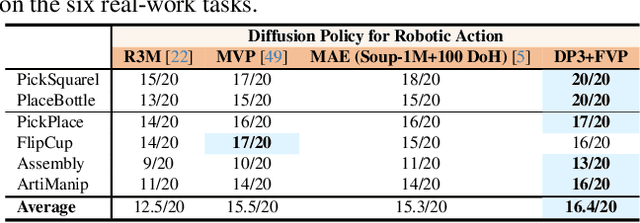
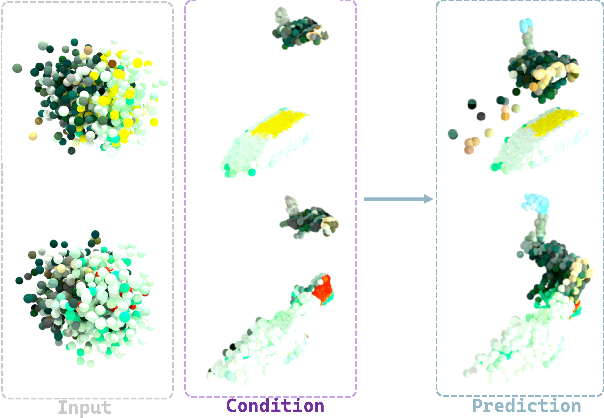
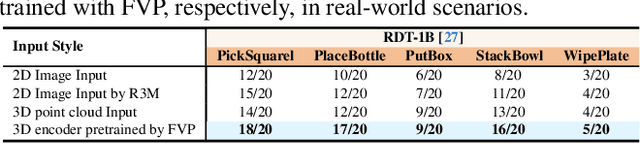
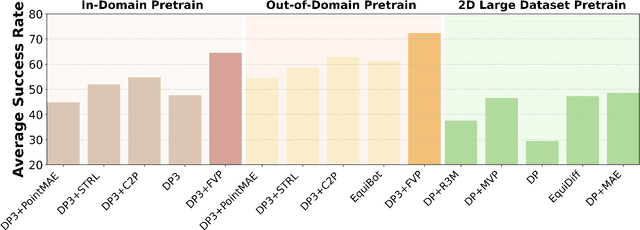
General visual representations learned from web-scale datasets for robotics have achieved great success in recent years, enabling data-efficient robot learning on manipulation tasks; yet these pre-trained representations are mostly on 2D images, neglecting the inherent 3D nature of the world. However, due to the scarcity of large-scale 3D data, it is still hard to extract a universal 3D representation from web datasets. Instead, we are seeking a general visual pre-training framework that could improve all 3D representations as an alternative. Our framework, called FVP, is a novel 4D Visual Pre-training framework for real-world robot learning. FVP frames the visual pre-training objective as a next-point-cloud-prediction problem, models the prediction model as a diffusion model, and pre-trains the model on the larger public datasets directly. Across twelve real-world manipulation tasks, FVP boosts the average success rate of 3D Diffusion Policy (DP3) for these tasks by 28%. The FVP pre-trained DP3 achieves state-of-the-art performance across imitation learning methods. Moreover, the efficacy of FVP adapts across various point cloud encoders and datasets. Finally, we apply FVP to the RDT-1B, a larger Vision-Language-Action robotic model, enhancing its performance on various robot tasks. Our project page is available at: https://4d- visual-pretraining.github.io/.
AC-DiT: Adaptive Coordination Diffusion Transformer for Mobile Manipulation
Jul 02, 2025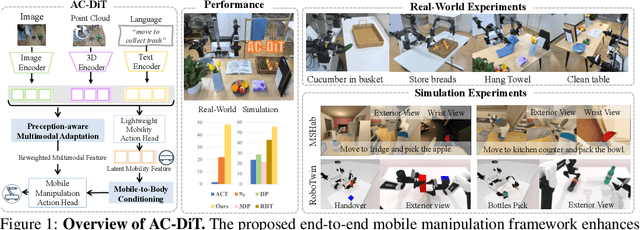
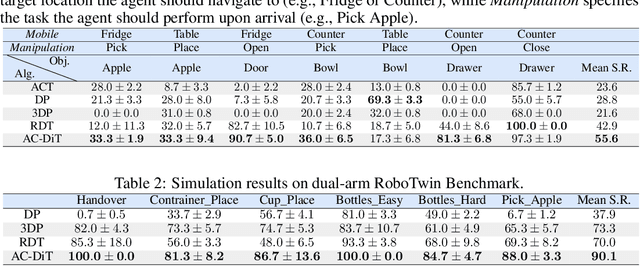
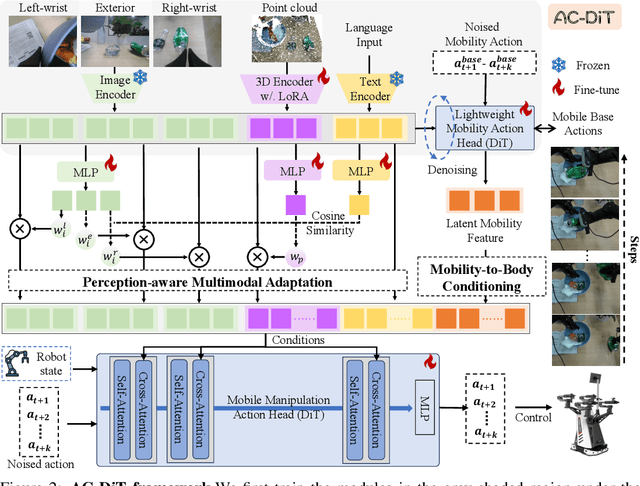
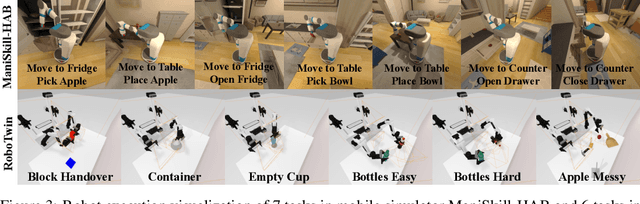
Recently, mobile manipulation has attracted increasing attention for enabling language-conditioned robotic control in household tasks. However, existing methods still face challenges in coordinating mobile base and manipulator, primarily due to two limitations. On the one hand, they fail to explicitly model the influence of the mobile base on manipulator control, which easily leads to error accumulation under high degrees of freedom. On the other hand, they treat the entire mobile manipulation process with the same visual observation modality (e.g., either all 2D or all 3D), overlooking the distinct multimodal perception requirements at different stages during mobile manipulation. To address this, we propose the Adaptive Coordination Diffusion Transformer (AC-DiT), which enhances mobile base and manipulator coordination for end-to-end mobile manipulation. First, since the motion of the mobile base directly influences the manipulator's actions, we introduce a mobility-to-body conditioning mechanism that guides the model to first extract base motion representations, which are then used as context prior for predicting whole-body actions. This enables whole-body control that accounts for the potential impact of the mobile base's motion. Second, to meet the perception requirements at different stages of mobile manipulation, we design a perception-aware multimodal conditioning strategy that dynamically adjusts the fusion weights between various 2D visual images and 3D point clouds, yielding visual features tailored to the current perceptual needs. This allows the model to, for example, adaptively rely more on 2D inputs when semantic information is crucial for action prediction, while placing greater emphasis on 3D geometric information when precise spatial understanding is required. We validate AC-DiT through extensive experiments on both simulated and real-world mobile manipulation tasks.
SpikePingpong: High-Frequency Spike Vision-based Robot Learning for Precise Striking in Table Tennis Game
Jun 07, 2025
Learning to control high-speed objects in the real world remains a challenging frontier in robotics. Table tennis serves as an ideal testbed for this problem, demanding both rapid interception of fast-moving balls and precise adjustment of their trajectories. This task presents two fundamental challenges: it requires a high-precision vision system capable of accurately predicting ball trajectories, and it necessitates intelligent strategic planning to ensure precise ball placement to target regions. The dynamic nature of table tennis, coupled with its real-time response requirements, makes it particularly well-suited for advancing robotic control capabilities in fast-paced, precision-critical domains. In this paper, we present SpikePingpong, a novel system that integrates spike-based vision with imitation learning for high-precision robotic table tennis. Our approach introduces two key attempts that directly address the aforementioned challenges: SONIC, a spike camera-based module that achieves millimeter-level precision in ball-racket contact prediction by compensating for real-world uncertainties such as air resistance and friction; and IMPACT, a strategic planning module that enables accurate ball placement to targeted table regions. The system harnesses a 20 kHz spike camera for high-temporal resolution ball tracking, combined with efficient neural network models for real-time trajectory correction and stroke planning. Experimental results demonstrate that SpikePingpong achieves a remarkable 91% success rate for 30 cm accuracy target area and 71% in the more challenging 20 cm accuracy task, surpassing previous state-of-the-art approaches by 38% and 37% respectively. These significant performance improvements enable the robust implementation of sophisticated tactical gameplay strategies, providing a new research perspective for robotic control in high-speed dynamic tasks.
H2R: A Human-to-Robot Data Augmentation for Robot Pre-training from Videos
May 17, 2025
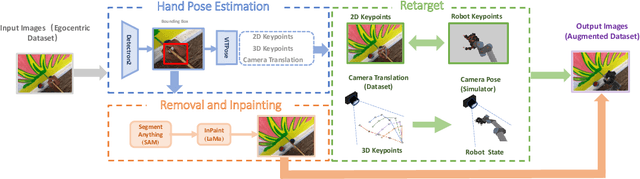


Large-scale pre-training using videos has proven effective for robot learning. However, the models pre-trained on such data can be suboptimal for robot learning due to the significant visual gap between human hands and those of different robots. To remedy this, we propose H2R, a simple data augmentation technique that detects human hand keypoints, synthesizes robot motions in simulation, and composites rendered robots into egocentric videos. This process explicitly bridges the visual gap between human and robot embodiments during pre-training. We apply H2R to augment large-scale egocentric human video datasets such as Ego4D and SSv2, replacing human hands with simulated robotic arms to generate robot-centric training data. Based on this, we construct and release a family of 1M-scale datasets covering multiple robot embodiments (UR5 with gripper/Leaphand, Franka) and data sources (SSv2, Ego4D). To verify the effectiveness of the augmentation pipeline, we introduce a CLIP-based image-text similarity metric that quantitatively evaluates the semantic fidelity of robot-rendered frames to the original human actions. We validate H2R across three simulation benchmarks: Robomimic, RLBench and PushT and real-world manipulation tasks with a UR5 robot equipped with Gripper and Leaphand end-effectors. H2R consistently improves downstream success rates, yielding gains of 5.0%-10.2% in simulation and 6.7%-23.3% in real-world tasks across various visual encoders and policy learning methods. These results indicate that H2R improves the generalization ability of robotic policies by mitigating the visual discrepancies between human and robot domains.
HybridVLA: Collaborative Diffusion and Autoregression in a Unified Vision-Language-Action Model
Mar 13, 2025Recent advancements in vision-language models (VLMs) for common-sense reasoning have led to the development of vision-language-action (VLA) models, enabling robots to perform generalized manipulation. Although existing autoregressive VLA methods leverage large-scale pretrained knowledge, they disrupt the continuity of actions. Meanwhile, some VLA methods incorporate an additional diffusion head to predict continuous actions, relying solely on VLM-extracted features, which limits their reasoning capabilities. In this paper, we introduce HybridVLA, a unified framework that seamlessly integrates the strengths of both autoregressive and diffusion policies within a single large language model, rather than simply connecting them. To bridge the generation gap, a collaborative training recipe is proposed that injects the diffusion modeling directly into the next-token prediction. With this recipe, we find that these two forms of action prediction not only reinforce each other but also exhibit varying performance across different tasks. Therefore, we design a collaborative action ensemble mechanism that adaptively fuses these two predictions, leading to more robust control. In experiments, HybridVLA outperforms previous state-of-the-art VLA methods across various simulation and real-world tasks, including both single-arm and dual-arm robots, while demonstrating stable manipulation in previously unseen configurations.