 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZoomSpec: A Physics-Guided Coarse-to-Fine Framework for Wideband Spectrum Sensing
Apr 15, 2026Wideband spectrum sensing for low-altitude monitoring is critical yet challenging due to heterogeneous protocols,large bandwidths, and non-stationary SNR. Existing data-driven approaches treat spectrograms as natural images,suffering from domain mismatch: they neglect time-frequency resolution constraints and spectral leakage, leading topoor narrowband visibility. This paper proposes ZoomSpec, a physics-guided coarse-to-fine framework integrating signal processing priors with deep learning. We introduce a Log-Space STFT (LS-STFT) to overcome the geometric bottleneck of linear spectrograms, sharpening narrowband structures while maintaining constant relative resolution. A lightweight Coarse Proposal Net (CPN) rapidly screens the full band. To bridge coarse detection and fine recognition, we design an Adaptive Heterodyne Low-Pass (AHLP) module that executes center-frequency aligning, bandwidth-matched filtering, and safe decimation, purifying signals of out-of-band interference. A Fine Recognition Net (FRN) fuses purified time-domain I/Q with spectral magnitude via dual-domain attention to jointly refine temporal boundaries and modulation classification. Evaluations on the SpaceNet real-world dataset demonstrate state-of-the-art 78.1 mAP@0.5:0.95, surpassing existing leaderboard systems with superior stability across diverse modulation bandwidths.
Look Before Acting: Enhancing Vision Foundation Representations for Vision-Language-Action Models
Mar 17, 2026Vision-Language-Action (VLA) models have recently emerged as a promising paradigm for robotic manipulation, in which reliable action prediction critically depends on accurately interpreting and integrating visual observations conditioned on language instructions. Although recent works have sought to enhance the visual capabilities of VLA models, most approaches treat the LLM backbone as a black box, providing limited insight into how visual information is grounded into action generation. Therefore, we perform a systematic analysis of multiple VLA models across different action-generation paradigms and observe that sensitivity to visual tokens progressively decreases in deeper layers during action generation. Motivated by this observation, we propose \textbf{DeepVision-VLA}, built on a \textbf{Vision-Language Mixture-of-Transformers (VL-MoT)} framework. This framework enables shared attention between the vision foundation model and the VLA backbone, injecting multi-level visual features from the vision expert into deeper layers of the VLA backbone to enhance visual representations for precise and complex manipulation. In addition, we introduce \textbf{Action-Guided Visual Pruning (AGVP)}, which leverages shallow-layer attention to prune irrelevant visual tokens while preserving task-relevant ones, reinforcing critical visual cues for manipulation with minimal computational overhead. DeepVision-VLA outperforms prior state-of-the-art methods by 9.0\% and 7.5\% on simulated and real-world tasks, respectively, providing new insights for the design of visually enhanced VLA models.
Learnable Template Matching Approach for Micro-Deformation Monitoring based on Integrated Sensing and Communication Platform
Mar 12, 2026Existing integrated sensing and communication (ISAC) platforms fail to fully utilize the shared spectrum and aperture resources for sensing, resulting in poor sensing performance. Specifically, weak target sensing on the ISAC platform, such as micro-deformation monitoring (mDM), suffers from inaccurate measurements due to poor sensing quality. In this paper, we propose an AI-assisted approach to alleviate the effect of poor sensing quality in the ISAC system by effectively removing the clutter. We begin by modeling the environment clutter model as a combination of the deterministic and stochastic signals to represent urban coverage scenarios around the base station (BS). A clutter suppression optimization problem is formulated to extract the micro-deformation displacement (mDD) from the original ISAC signals. We then propose a learnable template-matching (LTM) approach to mitigate the influences of clutters, thereby enhancing sensing quality. In particular, the electromagnetic (EM) signal feature of the mDD is embedded into the network to strengthen the mDM signal, and clutter filters are incorporated to suppress environmental clutter. Numerical results illustrate the superiority of our proposed approach concerning convergence speed and accuracy in mDD prediction. By deploying our approach to the BS measurement, the simulation-only trained LTM exhibits impressive performance in environment clutter separation and mDD estimation.
TwinRL-VLA: Digital Twin-Driven Reinforcement Learning for Real-World Robotic Manipulation
Feb 09, 2026Despite strong generalization capabilities, Vision-Language-Action (VLA) models remain constrained by the high cost of expert demonstrations and insufficient real-world interaction. While online reinforcement learning (RL) has shown promise in improving general foundation models, applying RL to VLA manipulation in real-world settings is still hindered by low exploration efficiency and a restricted exploration space. Through systematic real-world experiments, we observe that the effective exploration space of online RL is closely tied to the data distribution of supervised fine-tuning (SFT). Motivated by this observation, we propose TwinRL, a digital twin-real-world collaborative RL framework designed to scale and guide exploration for VLA models. First, a high-fidelity digital twin is efficiently reconstructed from smartphone-captured scenes, enabling realistic bidirectional transfer between real and simulated environments. During the SFT warm-up stage, we introduce an exploration space expansion strategy using digital twins to broaden the support of the data trajectory distribution. Building on this enhanced initialization, we propose a sim-to-real guided exploration strategy to further accelerate online RL. Specifically, TwinRL performs efficient and parallel online RL in the digital twin prior to deployment, effectively bridging the gap between offline and online training stages. Subsequently, we exploit efficient digital twin sampling to identify failure-prone yet informative configurations, which are used to guide targeted human-in-the-loop rollouts on the real robot. In our experiments, TwinRL approaches 100% success in both in-distribution regions covered by real-world demonstrations and out-of-distribution regions, delivering at least a 30% speedup over prior real-world RL methods and requiring only about 20 minutes on average across four tasks.
RoboMIND 2.0: A Multimodal, Bimanual Mobile Manipulation Dataset for Generalizable Embodied Intelligence
Dec 31, 2025While data-driven imitation learning has revolutionized robotic manipulation, current approaches remain constrained by the scarcity of large-scale, diverse real-world demonstrations. Consequently, the ability of existing models to generalize across long-horizon bimanual tasks and mobile manipulation in unstructured environments remains limited. To bridge this gap, we present RoboMIND 2.0, a comprehensive real-world dataset comprising over 310K dual-arm manipulation trajectories collected across six distinct robot embodiments and 739 complex tasks. Crucially, to support research in contact-rich and spatially extended tasks, the dataset incorporates 12K tactile-enhanced episodes and 20K mobile manipulation trajectories. Complementing this physical data, we construct high-fidelity digital twins of our real-world environments, releasing an additional 20K-trajectory simulated dataset to facilitate robust sim-to-real transfer. To fully exploit the potential of RoboMIND 2.0, we propose MIND-2 system, a hierarchical dual-system frame-work optimized via offline reinforcement learning. MIND-2 integrates a high-level semantic planner (MIND-2-VLM) to decompose abstract natural language instructions into grounded subgoals, coupled with a low-level Vision-Language-Action executor (MIND-2-VLA), which generates precise, proprioception-aware motor actions.
Aerial Vision-Language Navigation with a Unified Framework for Spatial, Temporal and Embodied Reasoning
Dec 09, 2025Aerial Vision-and-Language Navigation (VLN) aims to enable unmanned aerial vehicles (UAVs) to interpret natural language instructions and navigate complex urban environments using onboard visual observation. This task holds promise for real-world applications such as low-altitude inspection, search-and-rescue, and autonomous aerial delivery. Existing methods often rely on panoramic images, depth inputs, or odometry to support spatial reasoning and action planning. These requirements increase system cost and integration complexity, thus hindering practical deployment for lightweight UAVs. We present a unified aerial VLN framework that operates solely on egocentric monocular RGB observations and natural language instructions. The model formulates navigation as a next-token prediction problem, jointly optimizing spatial perception, trajectory reasoning, and action prediction through prompt-guided multi-task learning. Moreover, we propose a keyframe selection strategy to reduce visual redundancy by retaining semantically informative frames, along with an action merging and label reweighting mechanism that mitigates long-tailed supervision imbalance and facilitates stable multi-task co-training. Extensive experiments on the Aerial VLN benchmark validate the effectiveness of our method. Under the challenging monocular RGB-only setting, our model achieves strong results across both seen and unseen environments. It significantly outperforms existing RGB-only baselines and narrows the performance gap with state-of-the-art panoramic RGB-D counterparts. Comprehensive ablation studies further demonstrate the contribution of our task design and architectural choices.
MLA: A Multisensory Language-Action Model for Multimodal Understanding and Forecasting in Robotic Manipulation
Sep 30, 2025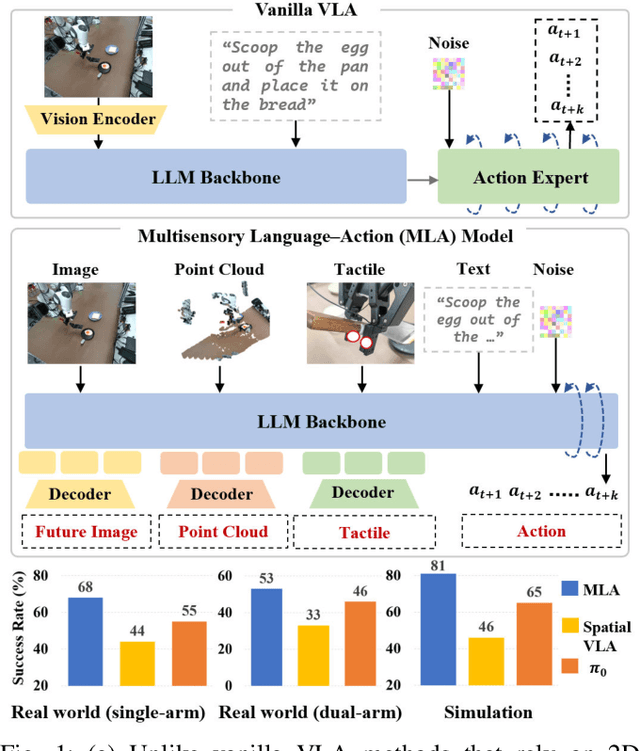
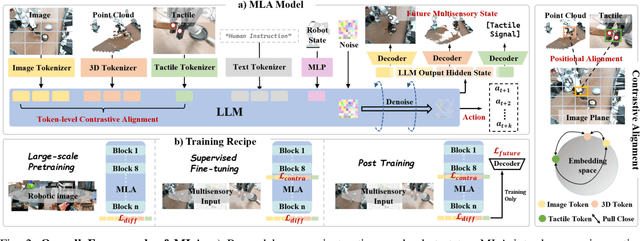
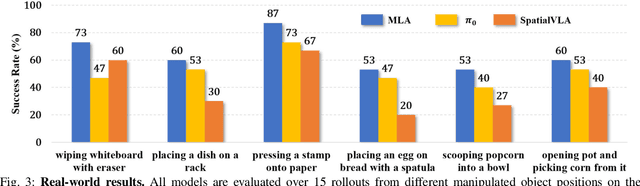
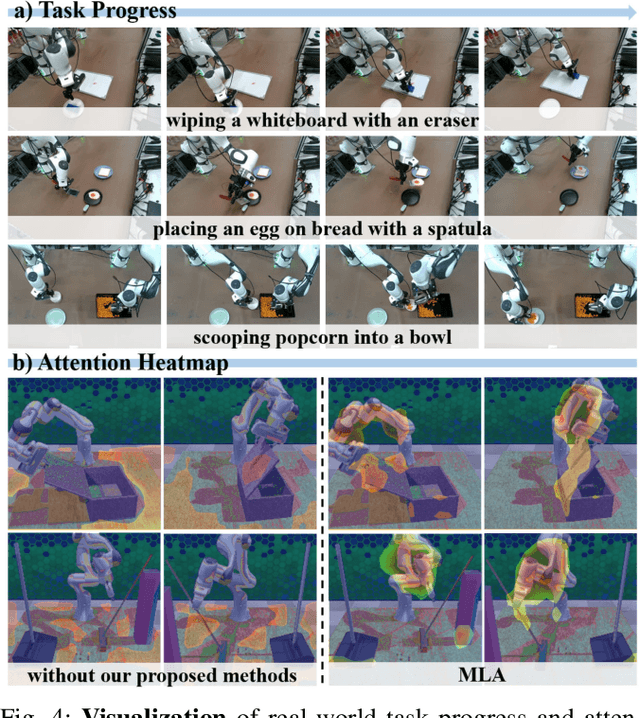
Vision-language-action models (VLAs) have shown generalization capabilities in robotic manipulation tasks by inheriting from vision-language models (VLMs) and learning action generation. Most VLA models focus on interpreting vision and language to generate actions, whereas robots must perceive and interact within the spatial-physical world. This gap highlights the need for a comprehensive understanding of robotic-specific multisensory information, which is crucial for achieving complex and contact-rich control. To this end, we introduce a multisensory language-action (MLA) model that collaboratively perceives heterogeneous sensory modalities and predicts future multisensory objectives to facilitate physical world modeling. Specifically, to enhance perceptual representations, we propose an encoder-free multimodal alignment scheme that innovatively repurposes the large language model itself as a perception module, directly interpreting multimodal cues by aligning 2D images, 3D point clouds, and tactile tokens through positional correspondence. To further enhance MLA's understanding of physical dynamics, we design a future multisensory generation post-training strategy that enables MLA to reason about semantic, geometric, and interaction information, providing more robust conditions for action generation. For evaluation, the MLA model outperforms the previous state-of-the-art 2D and 3D VLA methods by 12% and 24% in complex, contact-rich real-world tasks, respectively, while also demonstrating improved generalization to unseen configurations. Project website: https://sites.google.com/view/open-mla
AC-DiT: Adaptive Coordination Diffusion Transformer for Mobile Manipulation
Jul 02, 2025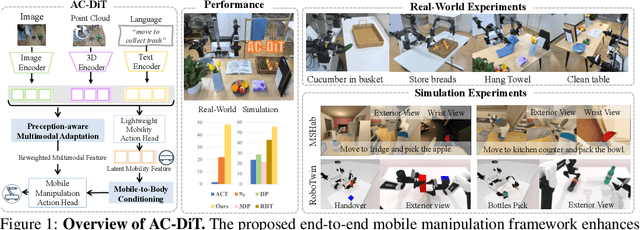
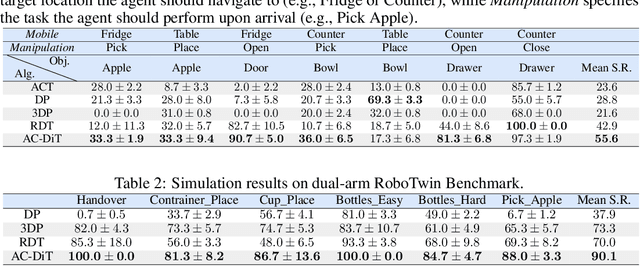
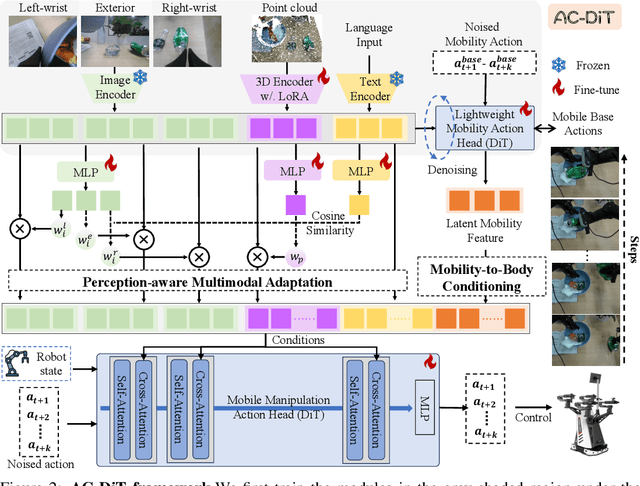
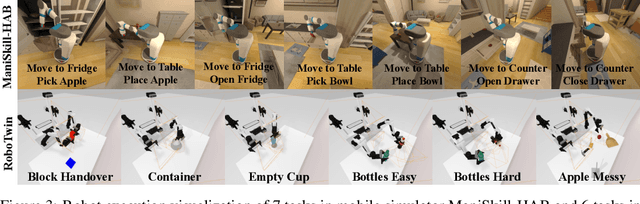
Recently, mobile manipulation has attracted increasing attention for enabling language-conditioned robotic control in household tasks. However, existing methods still face challenges in coordinating mobile base and manipulator, primarily due to two limitations. On the one hand, they fail to explicitly model the influence of the mobile base on manipulator control, which easily leads to error accumulation under high degrees of freedom. On the other hand, they treat the entire mobile manipulation process with the same visual observation modality (e.g., either all 2D or all 3D), overlooking the distinct multimodal perception requirements at different stages during mobile manipulation. To address this, we propose the Adaptive Coordination Diffusion Transformer (AC-DiT), which enhances mobile base and manipulator coordination for end-to-end mobile manipulation. First, since the motion of the mobile base directly influences the manipulator's actions, we introduce a mobility-to-body conditioning mechanism that guides the model to first extract base motion representations, which are then used as context prior for predicting whole-body actions. This enables whole-body control that accounts for the potential impact of the mobile base's motion. Second, to meet the perception requirements at different stages of mobile manipulation, we design a perception-aware multimodal conditioning strategy that dynamically adjusts the fusion weights between various 2D visual images and 3D point clouds, yielding visual features tailored to the current perceptual needs. This allows the model to, for example, adaptively rely more on 2D inputs when semantic information is crucial for action prediction, while placing greater emphasis on 3D geometric information when precise spatial understanding is required. We validate AC-DiT through extensive experiments on both simulated and real-world mobile manipulation tasks.
H2R: A Human-to-Robot Data Augmentation for Robot Pre-training from Videos
May 17, 2025
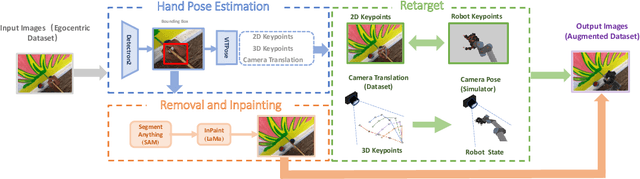


Large-scale pre-training using videos has proven effective for robot learning. However, the models pre-trained on such data can be suboptimal for robot learning due to the significant visual gap between human hands and those of different robots. To remedy this, we propose H2R, a simple data augmentation technique that detects human hand keypoints, synthesizes robot motions in simulation, and composites rendered robots into egocentric videos. This process explicitly bridges the visual gap between human and robot embodiments during pre-training. We apply H2R to augment large-scale egocentric human video datasets such as Ego4D and SSv2, replacing human hands with simulated robotic arms to generate robot-centric training data. Based on this, we construct and release a family of 1M-scale datasets covering multiple robot embodiments (UR5 with gripper/Leaphand, Franka) and data sources (SSv2, Ego4D). To verify the effectiveness of the augmentation pipeline, we introduce a CLIP-based image-text similarity metric that quantitatively evaluates the semantic fidelity of robot-rendered frames to the original human actions. We validate H2R across three simulation benchmarks: Robomimic, RLBench and PushT and real-world manipulation tasks with a UR5 robot equipped with Gripper and Leaphand end-effectors. H2R consistently improves downstream success rates, yielding gains of 5.0%-10.2% in simulation and 6.7%-23.3% in real-world tasks across various visual encoders and policy learning methods. These results indicate that H2R improves the generalization ability of robotic policies by mitigating the visual discrepancies between human and robot domains.
HybridVLA: Collaborative Diffusion and Autoregression in a Unified Vision-Language-Action Model
Mar 13, 2025Recent advancements in vision-language models (VLMs) for common-sense reasoning have led to the development of vision-language-action (VLA) models, enabling robots to perform generalized manipulation. Although existing autoregressive VLA methods leverage large-scale pretrained knowledge, they disrupt the continuity of actions. Meanwhile, some VLA methods incorporate an additional diffusion head to predict continuous actions, relying solely on VLM-extracted features, which limits their reasoning capabilities. In this paper, we introduce HybridVLA, a unified framework that seamlessly integrates the strengths of both autoregressive and diffusion policies within a single large language model, rather than simply connecting them. To bridge the generation gap, a collaborative training recipe is proposed that injects the diffusion modeling directly into the next-token prediction. With this recipe, we find that these two forms of action prediction not only reinforce each other but also exhibit varying performance across different tasks. Therefore, we design a collaborative action ensemble mechanism that adaptively fuses these two predictions, leading to more robust control. In experiments, HybridVLA outperforms previous state-of-the-art VLA methods across various simulation and real-world tasks, including both single-arm and dual-arm robots, while demonstrating stable manipulation in previously unseen configurations.