 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboMIND 2.0: A Multimodal, Bimanual Mobile Manipulation Dataset for Generalizable Embodied Intelligence
Dec 31, 2025While data-driven imitation learning has revolutionized robotic manipulation, current approaches remain constrained by the scarcity of large-scale, diverse real-world demonstrations. Consequently, the ability of existing models to generalize across long-horizon bimanual tasks and mobile manipulation in unstructured environments remains limited. To bridge this gap, we present RoboMIND 2.0, a comprehensive real-world dataset comprising over 310K dual-arm manipulation trajectories collected across six distinct robot embodiments and 739 complex tasks. Crucially, to support research in contact-rich and spatially extended tasks, the dataset incorporates 12K tactile-enhanced episodes and 20K mobile manipulation trajectories. Complementing this physical data, we construct high-fidelity digital twins of our real-world environments, releasing an additional 20K-trajectory simulated dataset to facilitate robust sim-to-real transfer. To fully exploit the potential of RoboMIND 2.0, we propose MIND-2 system, a hierarchical dual-system frame-work optimized via offline reinforcement learning. MIND-2 integrates a high-level semantic planner (MIND-2-VLM) to decompose abstract natural language instructions into grounded subgoals, coupled with a low-level Vision-Language-Action executor (MIND-2-VLA), which generates precise, proprioception-aware motor actions.
RoboOS-NeXT: A Unified Memory-based Framework for Lifelong, Scalable, and Robust Multi-Robot Collaboration
Oct 30, 2025The proliferation of collaborative robots across diverse tasks and embodiments presents a central challenge: achieving lifelong adaptability, scalable coordination, and robust scheduling in multi-agent systems. Existing approaches, from vision-language-action (VLA) models to hierarchical frameworks, fall short due to their reliance on limited or dividual-agent memory. This fundamentally constrains their ability to learn over long horizons, scale to heterogeneous teams, or recover from failures, highlighting the need for a unified memory representation. To address these limitations, we introduce RoboOS-NeXT, a unified memory-based framework for lifelong, scalable, and robust multi-robot collaboration. At the core of RoboOS-NeXT is the novel Spatio-Temporal-Embodiment Memory (STEM), which integrates spatial scene geometry, temporal event history, and embodiment profiles into a shared representation. This memory-centric design is integrated into a brain-cerebellum framework, where a high-level brain model performs global planning by retrieving and updating STEM, while low-level controllers execute actions locally. This closed loop between cognition, memory, and execution enables dynamic task allocation, fault-tolerant collaboration, and consistent state synchronization. We conduct extensive experiments spanning complex coordination tasks in restaurants, supermarkets, and households. Our results demonstrate that RoboOS-NeXT achieves superior performance across heterogeneous embodiments, validating its effectiveness in enabling lifelong, scalable, and robust multi-robot collaboration. Project website: https://flagopen.github.io/RoboOS/
4D Visual Pre-training for Robot Learning
Aug 24, 2025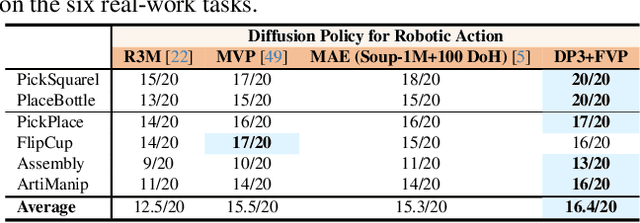
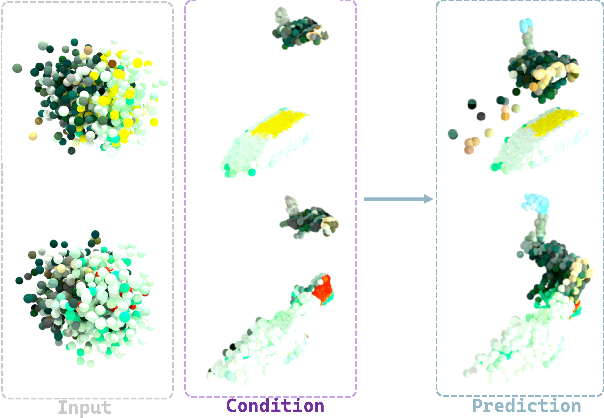
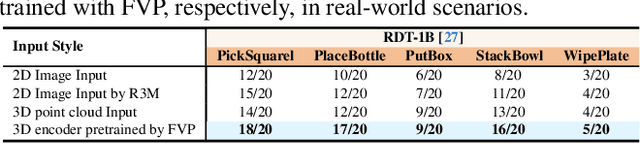
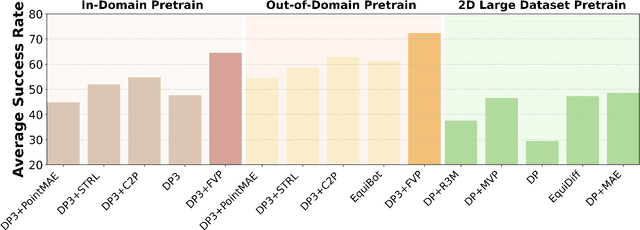
General visual representations learned from web-scale datasets for robotics have achieved great success in recent years, enabling data-efficient robot learning on manipulation tasks; yet these pre-trained representations are mostly on 2D images, neglecting the inherent 3D nature of the world. However, due to the scarcity of large-scale 3D data, it is still hard to extract a universal 3D representation from web datasets. Instead, we are seeking a general visual pre-training framework that could improve all 3D representations as an alternative. Our framework, called FVP, is a novel 4D Visual Pre-training framework for real-world robot learning. FVP frames the visual pre-training objective as a next-point-cloud-prediction problem, models the prediction model as a diffusion model, and pre-trains the model on the larger public datasets directly. Across twelve real-world manipulation tasks, FVP boosts the average success rate of 3D Diffusion Policy (DP3) for these tasks by 28%. The FVP pre-trained DP3 achieves state-of-the-art performance across imitation learning methods. Moreover, the efficacy of FVP adapts across various point cloud encoders and datasets. Finally, we apply FVP to the RDT-1B, a larger Vision-Language-Action robotic model, enhancing its performance on various robot tasks. Our project page is available at: https://4d- visual-pretraining.github.io/.
SpikePingpong: High-Frequency Spike Vision-based Robot Learning for Precise Striking in Table Tennis Game
Jun 07, 2025
Learning to control high-speed objects in the real world remains a challenging frontier in robotics. Table tennis serves as an ideal testbed for this problem, demanding both rapid interception of fast-moving balls and precise adjustment of their trajectories. This task presents two fundamental challenges: it requires a high-precision vision system capable of accurately predicting ball trajectories, and it necessitates intelligent strategic planning to ensure precise ball placement to target regions. The dynamic nature of table tennis, coupled with its real-time response requirements, makes it particularly well-suited for advancing robotic control capabilities in fast-paced, precision-critical domains. In this paper, we present SpikePingpong, a novel system that integrates spike-based vision with imitation learning for high-precision robotic table tennis. Our approach introduces two key attempts that directly address the aforementioned challenges: SONIC, a spike camera-based module that achieves millimeter-level precision in ball-racket contact prediction by compensating for real-world uncertainties such as air resistance and friction; and IMPACT, a strategic planning module that enables accurate ball placement to targeted table regions. The system harnesses a 20 kHz spike camera for high-temporal resolution ball tracking, combined with efficient neural network models for real-time trajectory correction and stroke planning. Experimental results demonstrate that SpikePingpong achieves a remarkable 91% success rate for 30 cm accuracy target area and 71% in the more challenging 20 cm accuracy task, surpassing previous state-of-the-art approaches by 38% and 37% respectively. These significant performance improvements enable the robust implementation of sophisticated tactical gameplay strategies, providing a new research perspective for robotic control in high-speed dynamic tasks.
CordViP: Correspondence-based Visuomotor Policy for Dexterous Manipulation in Real-World
Feb 12, 2025Achieving human-level dexterity in robots is a key objective in the field of robotic manipulation. Recent advancements in 3D-based imitation learning have shown promising results, providing an effective pathway to achieve this goal. However, obtaining high-quality 3D representations presents two key problems: (1) the quality of point clouds captured by a single-view camera is significantly affected by factors such as camera resolution, positioning, and occlusions caused by the dexterous hand; (2) the global point clouds lack crucial contact information and spatial correspondences, which are necessary for fine-grained dexterous manipulation tasks. To eliminate these limitations, we propose CordViP, a novel framework that constructs and learns correspondences by leveraging the robust 6D pose estimation of objects and robot proprioception. Specifically, we first introduce the interaction-aware point clouds, which establish correspondences between the object and the hand. These point clouds are then used for our pre-training policy, where we also incorporate object-centric contact maps and hand-arm coordination information, effectively capturing both spatial and temporal dynamics. Our method demonstrates exceptional dexterous manipulation capabilities with an average success rate of 90\% in four real-world tasks, surpassing other baselines by a large margin. Experimental results also highlight the superior generalization and robustness of CordViP to different objects, viewpoints, and scenarios. Code and videos are available on https://aureleopku.github.io/CordViP.
RoboMIND: Benchmark on Multi-embodiment Intelligence Normative Data for Robot Manipulation
Dec 18, 2024
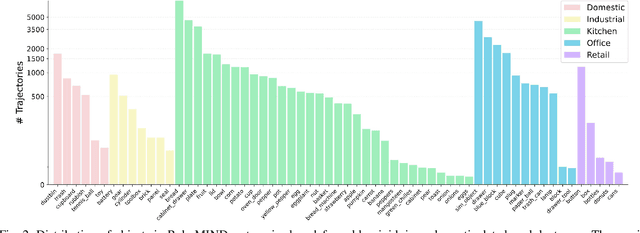
Developing robust and general-purpose robotic manipulation policies is a key goal in the field of robotics. To achieve effective generalization, it is essential to construct comprehensive datasets that encompass a large number of demonstration trajectories and diverse tasks. Unlike vision or language data that can be collected from the Internet, robotic datasets require detailed observations and manipulation actions, necessitating significant investment in hardware-software infrastructure and human labor. While existing works have focused on assembling various individual robot datasets, there remains a lack of a unified data collection standard and insufficient diversity in tasks, scenarios, and robot types. In this paper, we introduce RoboMIND (Multi-embodiment Intelligence Normative Data for Robot manipulation), featuring 55k real-world demonstration trajectories across 279 diverse tasks involving 61 different object classes. RoboMIND is collected through human teleoperation and encompasses comprehensive robotic-related information, including multi-view RGB-D images, proprioceptive robot state information, end effector details, and linguistic task descriptions. To ensure dataset consistency and reliability during policy learning, RoboMIND is built on a unified data collection platform and standardized protocol, covering four distinct robotic embodiments. We provide a thorough quantitative and qualitative analysis of RoboMIND across multiple dimensions, offering detailed insights into the diversity of our datasets. In our experiments, we conduct extensive real-world testing with four state-of-the-art imitation learning methods, demonstrating that training with RoboMIND data results in a high manipulation success rate and strong generalization. Our project is at https://x-humanoid-robomind.github.io/.
Towards Reliable Verification of Unauthorized Data Usage in Personalized Text-to-Image Diffusion Models
Oct 14, 2024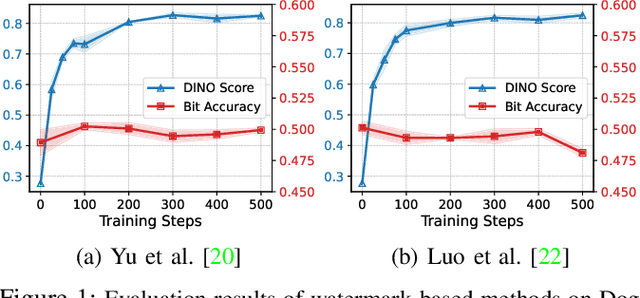

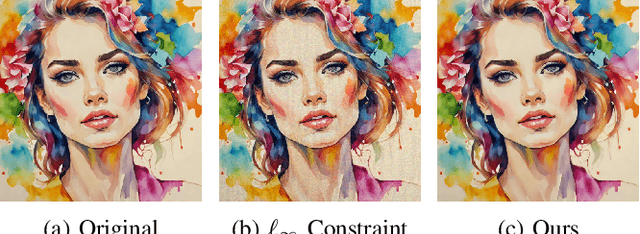
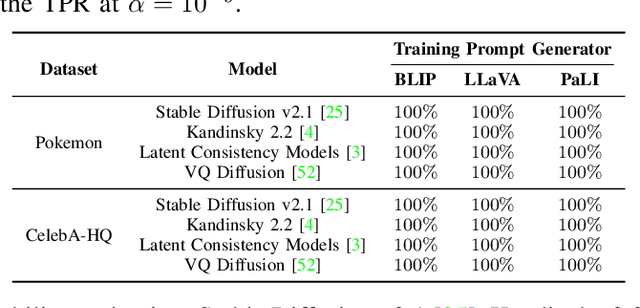
Text-to-image diffusion models are pushing the boundaries of what generative AI can achieve in our lives. Beyond their ability to generate general images, new personalization techniques have been proposed to customize the pre-trained base models for crafting images with specific themes or styles. Such a lightweight solution, enabling AI practitioners and developers to easily build their own personalized models, also poses a new concern regarding whether the personalized models are trained from unauthorized data. A promising solution is to proactively enable data traceability in generative models, where data owners embed external coatings (e.g., image watermarks or backdoor triggers) onto the datasets before releasing. Later the models trained over such datasets will also learn the coatings and unconsciously reproduce them in the generated mimicries, which can be extracted and used as the data usage evidence. However, we identify the existing coatings cannot be effectively learned in personalization tasks, making the corresponding verification less reliable. In this paper, we introduce SIREN, a novel methodology to proactively trace unauthorized data usage in black-box personalized text-to-image diffusion models. Our approach optimizes the coating in a delicate way to be recognized by the model as a feature relevant to the personalization task, thus significantly improving its learnability. We also utilize a human perceptual-aware constraint, a hypersphere classification technique, and a hypothesis-testing-guided verification method to enhance the stealthiness and detection accuracy of the coating. The effectiveness of SIREN is verified through extensive experiments on a diverse set of benchmark datasets, models, and learning algorithms. SIREN is also effective in various real-world scenarios and evaluated against potential countermeasures. Our code is publicly available.
CORE: Mitigating Catastrophic Forgetting in Continual Learning through Cognitive Replay
Feb 02, 2024This paper introduces a novel perspective to significantly mitigate catastrophic forgetting in continuous learning (CL), which emphasizes models' capacity to preserve existing knowledge and assimilate new information. Current replay-based methods treat every task and data sample equally and thus can not fully exploit the potential of the replay buffer. In response, we propose COgnitive REplay (CORE), which draws inspiration from human cognitive review processes. CORE includes two key strategies: Adaptive Quantity Allocation and Quality-Focused Data Selection. The former adaptively modulates the replay buffer allocation for each task based on its forgetting rate, while the latter guarantees the inclusion of representative data that best encapsulates the characteristics of each task within the buffer. Our approach achieves an average accuracy of 37.95% on split-CIFAR10, surpassing the best baseline method by 6.52%. Additionally, it significantly enhances the accuracy of the poorest-performing task by 6.30% compared to the top baseline.