 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpikePingpong: High-Frequency Spike Vision-based Robot Learning for Precise Striking in Table Tennis Game
Jun 07, 2025
Learning to control high-speed objects in the real world remains a challenging frontier in robotics. Table tennis serves as an ideal testbed for this problem, demanding both rapid interception of fast-moving balls and precise adjustment of their trajectories. This task presents two fundamental challenges: it requires a high-precision vision system capable of accurately predicting ball trajectories, and it necessitates intelligent strategic planning to ensure precise ball placement to target regions. The dynamic nature of table tennis, coupled with its real-time response requirements, makes it particularly well-suited for advancing robotic control capabilities in fast-paced, precision-critical domains. In this paper, we present SpikePingpong, a novel system that integrates spike-based vision with imitation learning for high-precision robotic table tennis. Our approach introduces two key attempts that directly address the aforementioned challenges: SONIC, a spike camera-based module that achieves millimeter-level precision in ball-racket contact prediction by compensating for real-world uncertainties such as air resistance and friction; and IMPACT, a strategic planning module that enables accurate ball placement to targeted table regions. The system harnesses a 20 kHz spike camera for high-temporal resolution ball tracking, combined with efficient neural network models for real-time trajectory correction and stroke planning. Experimental results demonstrate that SpikePingpong achieves a remarkable 91% success rate for 30 cm accuracy target area and 71% in the more challenging 20 cm accuracy task, surpassing previous state-of-the-art approaches by 38% and 37% respectively. These significant performance improvements enable the robust implementation of sophisticated tactical gameplay strategies, providing a new research perspective for robotic control in high-speed dynamic tasks.
RoboMIND: Benchmark on Multi-embodiment Intelligence Normative Data for Robot Manipulation
Dec 18, 2024
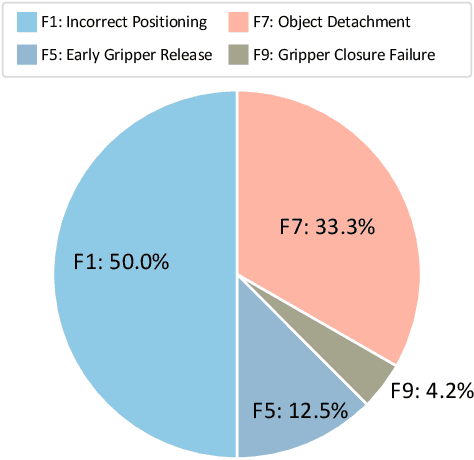
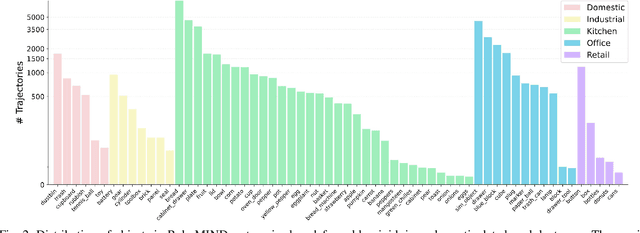
Developing robust and general-purpose robotic manipulation policies is a key goal in the field of robotics. To achieve effective generalization, it is essential to construct comprehensive datasets that encompass a large number of demonstration trajectories and diverse tasks. Unlike vision or language data that can be collected from the Internet, robotic datasets require detailed observations and manipulation actions, necessitating significant investment in hardware-software infrastructure and human labor. While existing works have focused on assembling various individual robot datasets, there remains a lack of a unified data collection standard and insufficient diversity in tasks, scenarios, and robot types. In this paper, we introduce RoboMIND (Multi-embodiment Intelligence Normative Data for Robot manipulation), featuring 55k real-world demonstration trajectories across 279 diverse tasks involving 61 different object classes. RoboMIND is collected through human teleoperation and encompasses comprehensive robotic-related information, including multi-view RGB-D images, proprioceptive robot state information, end effector details, and linguistic task descriptions. To ensure dataset consistency and reliability during policy learning, RoboMIND is built on a unified data collection platform and standardized protocol, covering four distinct robotic embodiments. We provide a thorough quantitative and qualitative analysis of RoboMIND across multiple dimensions, offering detailed insights into the diversity of our datasets. In our experiments, we conduct extensive real-world testing with four state-of-the-art imitation learning methods, demonstrating that training with RoboMIND data results in a high manipulation success rate and strong generalization. Our project is at https://x-humanoid-robomind.github.io/.
Self-Corrected Multimodal Large Language Model for End-to-End Robot Manipulation
May 27, 2024



Robot manipulation policies have shown unsatisfactory action performance when confronted with novel task or object instances. Hence, the capability to automatically detect and self-correct failure action is essential for a practical robotic system. Recently, Multimodal Large Language Models (MLLMs) have shown promise in visual instruction following and demonstrated strong reasoning abilities in various tasks. To unleash general MLLMs as an end-to-end robotic agent, we introduce a Self-Corrected (SC)-MLLM, equipping our model not only to predict end-effector poses but also to autonomously recognize and correct failure actions. Specifically, we first conduct parameter-efficient fine-tuning to empower MLLM with pose prediction ability, which is reframed as a language modeling problem. When facing execution failures, our model learns to identify low-level action error causes (i.e., position and rotation errors) and adaptively seeks prompt feedback from experts. Based on the feedback, SC-MLLM rethinks the current failure scene and generates the corrected actions. Furthermore, we design a continuous policy learning method for successfully corrected samples, enhancing the model's adaptability to the current scene configuration and reducing the frequency of expert intervention. To evaluate our SC-MLLM, we conduct extensive experiments in both simulation and real-world settings. SC-MLLM agent significantly improve manipulation accuracy compared to previous state-of-the-art robotic MLLM (ManipLLM), increasing from 57\% to 79\% on seen object categories and from 47\% to 69\% on unseen novel categories.
Cloud-Device Collaborative Learning for Multimodal Large Language Models
Dec 26, 2023



The burgeoning field of Multimodal Large Language Models (MLLMs) has exhibited remarkable performance in diverse tasks such as captioning, commonsense reasoning, and visual scene understanding. However, the deployment of these large-scale MLLMs on client devices is hindered by their extensive model parameters, leading to a notable decline in generalization capabilities when these models are compressed for device deployment. Addressing this challenge, we introduce a Cloud-Device Collaborative Continual Adaptation framework, designed to enhance the performance of compressed, device-deployed MLLMs by leveraging the robust capabilities of cloud-based, larger-scale MLLMs. Our framework is structured into three key components: a device-to-cloud uplink for efficient data transmission, cloud-based knowledge adaptation, and an optimized cloud-to-device downlink for model deployment. In the uplink phase, we employ an Uncertainty-guided Token Sampling (UTS) strategy to effectively filter out-of-distribution tokens, thereby reducing transmission costs and improving training efficiency. On the cloud side, we propose Adapter-based Knowledge Distillation (AKD) method to transfer refined knowledge from large-scale to compressed, pocket-size MLLMs. Furthermore, we propose a Dynamic Weight update Compression (DWC) strategy for the downlink, which adaptively selects and quantizes updated weight parameters, enhancing transmission efficiency and reducing the representational disparity between cloud and device models. Extensive experiments on several multimodal benchmarks demonstrate the superiority of our proposed framework over prior Knowledge Distillation and device-cloud collaboration methods. Notably, we also validate the feasibility of our approach to real-world experiments.
COLE: A Hierarchical Generation Framework for Graphic Design
Nov 28, 2023Graphic design, which has been evolving since the 15th century, plays a crucial role in advertising. The creation of high-quality designs demands creativity, innovation, and lateral thinking. This intricate task involves understanding the objective, crafting visual elements such as the background, decoration, font, color, and shape, formulating diverse professional layouts, and adhering to fundamental visual design principles. In this paper, we introduce COLE, a hierarchical generation framework designed to comprehensively address these challenges. This COLE system can transform a straightforward intention prompt into a high-quality graphic design, while also supporting flexible editing based on user input. Examples of such input might include directives like ``design a poster for Hisaishi's concert.'' The key insight is to dissect the complex task of text-to-design generation into a hierarchy of simpler sub-tasks, each addressed by specialized models working collaboratively. The results from these models are then consolidated to produce a cohesive final output. Our hierarchical task decomposition can streamline the complex process and significantly enhance generation reliability. Our COLE system consists of multiple fine-tuned Large Language Models (LLMs), Large Multimodal Models (LMMs), and Diffusion Models (DMs), each specifically tailored for a design-aware text or image generation task. Furthermore, we construct the DESIGNERINTENTION benchmark to highlight the superiority of our COLE over existing methods in generating high-quality graphic designs from user intent. We perceive our COLE as an important step towards addressing more complex visual design generation tasks in the future.