 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemma 3 Technical Report
Mar 25, 2025We introduce Gemma 3, a multimodal addition to the Gemma family of lightweight open models, ranging in scale from 1 to 27 billion parameters. This version introduces vision understanding abilities, a wider coverage of languages and longer context - at least 128K tokens. We also change the architecture of the model to reduce the KV-cache memory that tends to explode with long context. This is achieved by increasing the ratio of local to global attention layers, and keeping the span on local attention short. The Gemma 3 models are trained with distillation and achieve superior performance to Gemma 2 for both pre-trained and instruction finetuned versions. In particular, our novel post-training recipe significantly improves the math, chat, instruction-following and multilingual abilities, making Gemma3-4B-IT competitive with Gemma2-27B-IT and Gemma3-27B-IT comparable to Gemini-1.5-Pro across benchmarks. We release all our models to the community.
Gemma 2: Improving Open Language Models at a Practical Size
Aug 02, 2024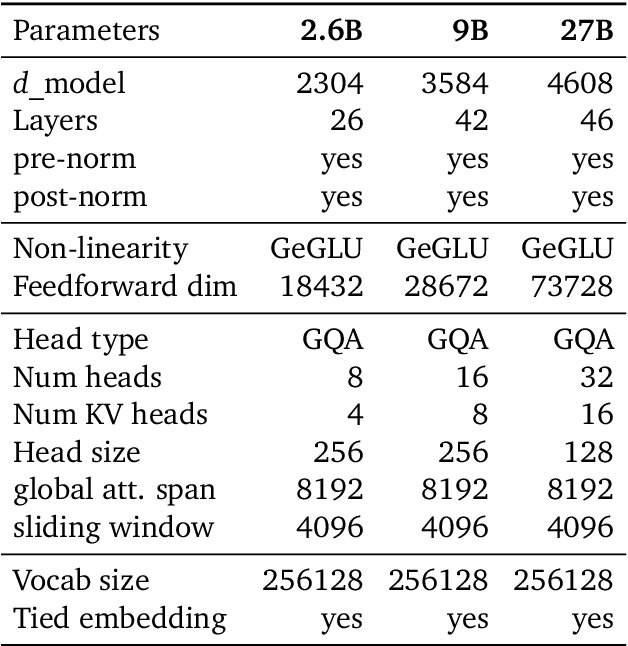
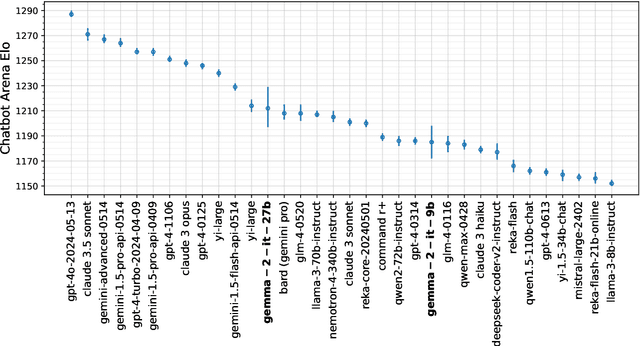
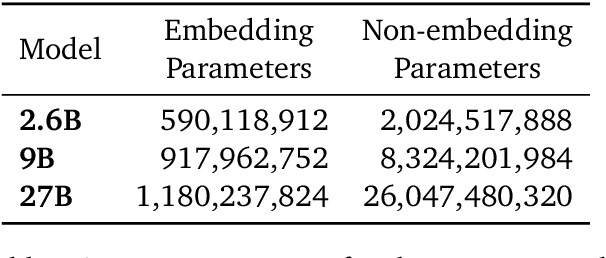
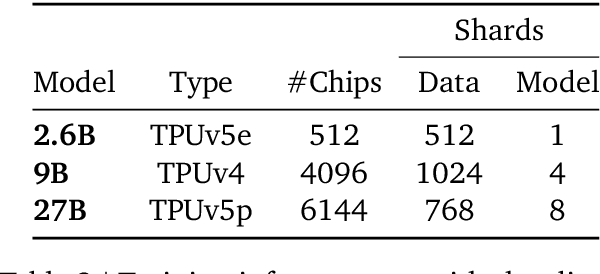
In this work, we introduce Gemma 2, a new addition to the Gemma family of lightweight, state-of-the-art open models, ranging in scale from 2 billion to 27 billion parameters. In this new version, we apply several known technical modifications to the Transformer architecture, such as interleaving local-global attentions (Beltagy et al., 2020a) and group-query attention (Ainslie et al., 2023). We also train the 2B and 9B models with knowledge distillation (Hinton et al., 2015) instead of next token prediction. The resulting models deliver the best performance for their size, and even offer competitive alternatives to models that are 2-3 times bigger. We release all our models to the community.
RecurrentGemma: Moving Past Transformers for Efficient Open Language Models
Apr 11, 2024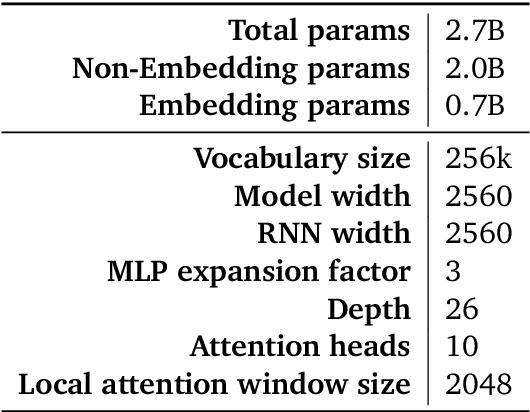
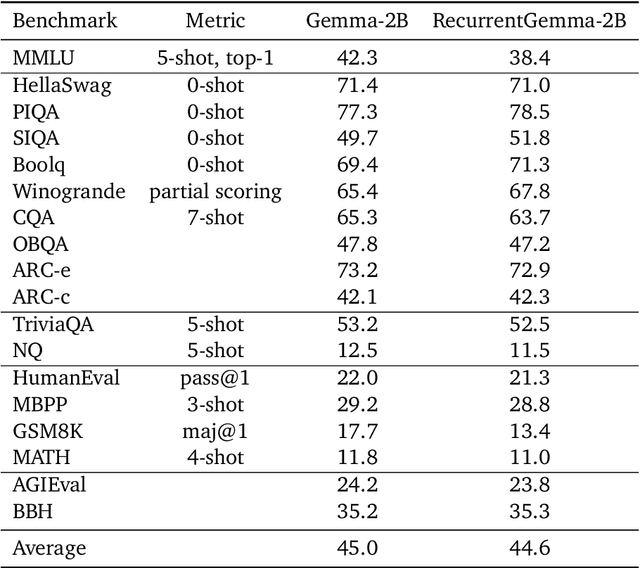
We introduce RecurrentGemma, an open language model which uses Google's novel Griffin architecture. Griffin combines linear recurrences with local attention to achieve excellent performance on language. It has a fixed-sized state, which reduces memory use and enables efficient inference on long sequences. We provide a pre-trained model with 2B non-embedding parameters, and an instruction tuned variant. Both models achieve comparable performance to Gemma-2B despite being trained on fewer tokens.
Gemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Accelerating Large Language Model Decoding with Speculative Sampling
Feb 02, 2023


We present speculative sampling, an algorithm for accelerating transformer decoding by enabling the generation of multiple tokens from each transformer call. Our algorithm relies on the observation that the latency of parallel scoring of short continuations, generated by a faster but less powerful draft model, is comparable to that of sampling a single token from the larger target model. This is combined with a novel modified rejection sampling scheme which preserves the distribution of the target model within hardware numerics. We benchmark speculative sampling with Chinchilla, a 70 billion parameter language model, achieving a 2-2.5x decoding speedup in a distributed setup, without compromising the sample quality or making modifications to the model itself.
Improving alignment of dialogue agents via targeted human judgements
Sep 28, 2022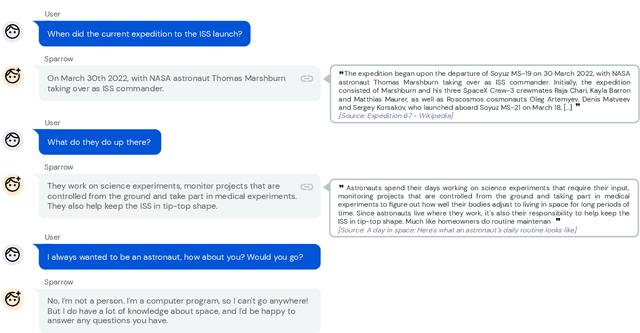
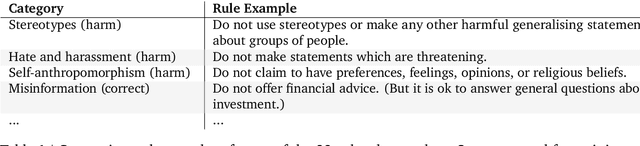
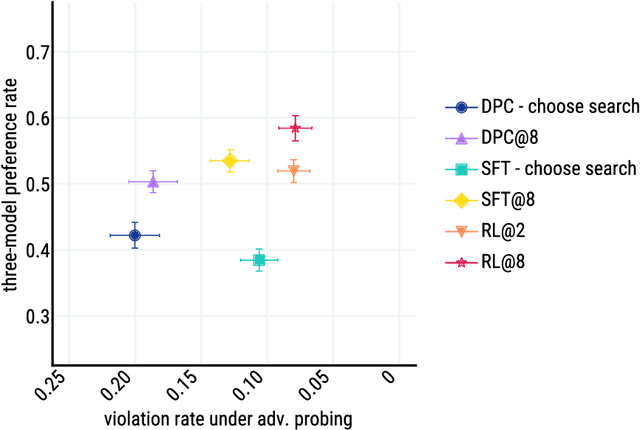
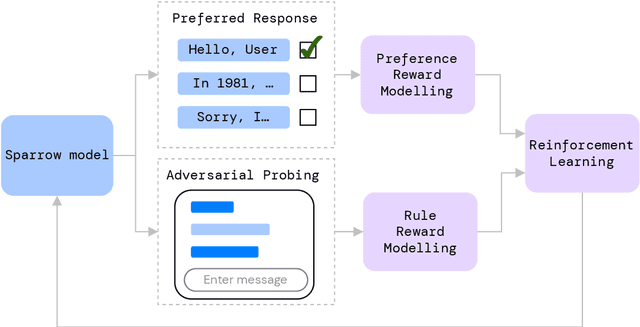
We present Sparrow, an information-seeking dialogue agent trained to be more helpful, correct, and harmless compared to prompted language model baselines. We use reinforcement learning from human feedback to train our models with two new additions to help human raters judge agent behaviour. First, to make our agent more helpful and harmless, we break down the requirements for good dialogue into natural language rules the agent should follow, and ask raters about each rule separately. We demonstrate that this breakdown enables us to collect more targeted human judgements of agent behaviour and allows for more efficient rule-conditional reward models. Second, our agent provides evidence from sources supporting factual claims when collecting preference judgements over model statements. For factual questions, evidence provided by Sparrow supports the sampled response 78% of the time. Sparrow is preferred more often than baselines while being more resilient to adversarial probing by humans, violating our rules only 8% of the time when probed. Finally, we conduct extensive analyses showing that though our model learns to follow our rules it can exhibit distributional biases.
Design and Implementation of a Human-Robot Joint Action Framework using Augmented Reality and Eye Gaze
Aug 25, 2022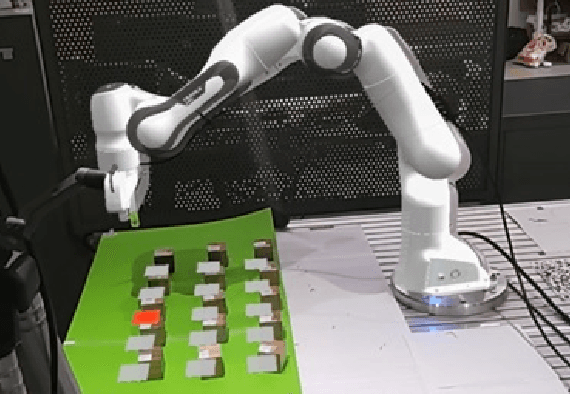
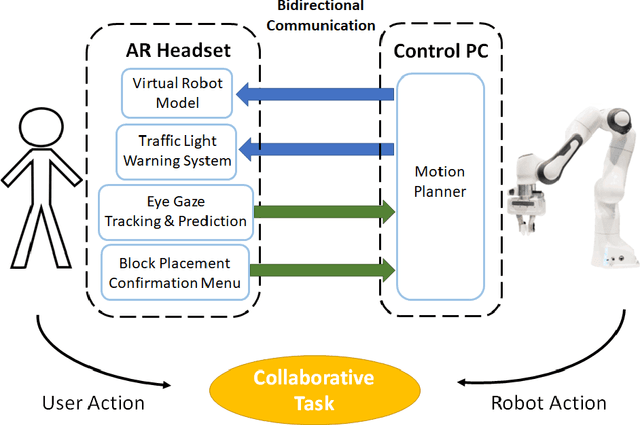
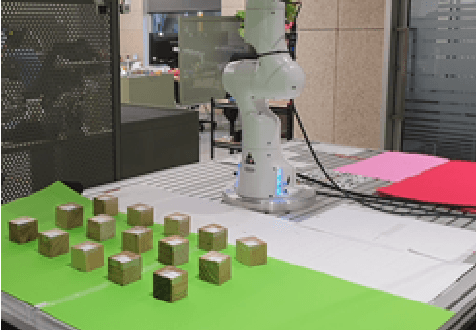
When humans work together to complete a joint task, each person builds an internal model of the situation and how it will evolve. Efficient collaboration is dependent on how these individual models overlap to form a shared mental model among team members, which is important for collaborative processes in human-robot teams. The development and maintenance of an accurate shared mental model requires bidirectional communication of individual intent and the ability to interpret the intent of other team members. To enable effective human-robot collaboration, this paper presents a design and implementation of a novel joint action framework in human-robot team collaboration, utilizing augmented reality (AR) technology and user eye gaze to enable bidirectional communication of intent. We tested our new framework through a user study with 37 participants, and found that our system improves task efficiency, trust, as well as task fluency. Therefore, using AR and eye gaze to enable bidirectional communication is a promising mean to improve core components that influence collaboration between humans and robots.
The Generalized Eigenvalue Problem as a Nash Equilibrium
Jun 10, 2022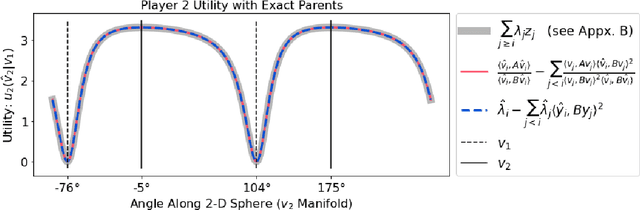
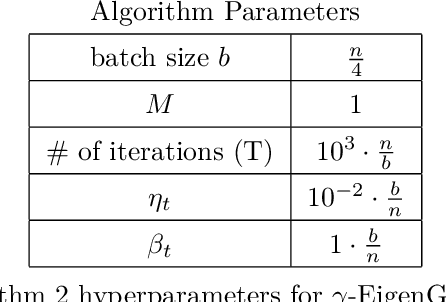
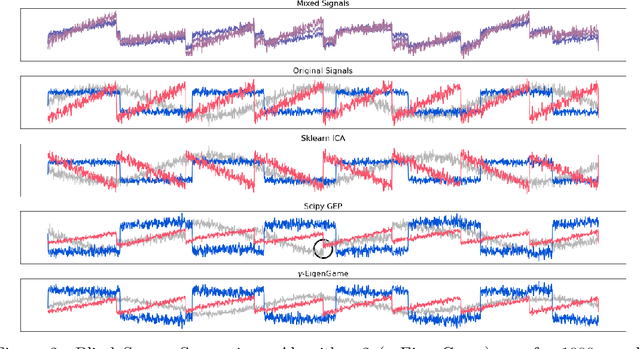
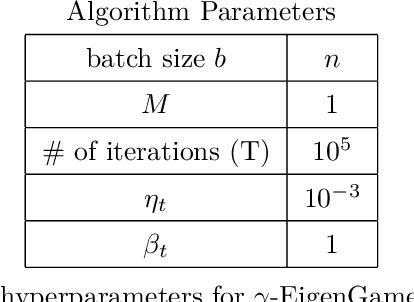
The generalized eigenvalue problem (GEP) is a fundamental concept in numerical linear algebra. It captures the solution of many classical machine learning problems such as canonical correlation analysis, independent components analysis, partial least squares, linear discriminant analysis, principal components, successor features and others. Despite this, most general solvers are prohibitively expensive when dealing with massive data sets and research has instead concentrated on finding efficient solutions to specific problem instances. In this work, we develop a game-theoretic formulation of the top-$k$ GEP whose Nash equilibrium is the set of generalized eigenvectors. We also present a parallelizable algorithm with guaranteed asymptotic convergence to the Nash. Current state-of-the-art methods require $\mathcal{O}(d^2k)$ complexity per iteration which is prohibitively expensive when the number of dimensions ($d$) is large. We show how to achieve $\mathcal{O}(dk)$ complexity, scaling to datasets $100\times$ larger than those evaluated by prior methods. Empirically we demonstrate that our algorithm is able to solve a variety of GEP problem instances including a large-scale analysis of neural network activations.