 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFailure-Aware Bimanual Teleoperation via Conservative Value Guided Assistance
Feb 01, 2026Teleoperation of high-precision manipulation is con-strained by tight success tolerances and complex contact dy-namics, which make impending failures difficult for human operators to anticipate under partial observability. This paper proposes a value-guided, failure-aware framework for bimanual teleoperation that provides compliant haptic assistance while pre-serving continuous human authority. The framework is trained entirely from heterogeneous offline teleoperation data containing both successful and failed executions. Task feasibility is mod-eled as a conservative success score learned via Conservative Value Learning, yielding a risk-sensitive estimate that remains reliable under distribution shift. During online operation, the learned success score regulates the level of assistance, while a learned actor provides a corrective motion direction. Both are integrated through a joint-space impedance interface on the master side, yielding continuous guidance that steers the operator away from failure-prone actions without overriding intent. Experimental results on contact-rich manipulation tasks demonstrate improved task success rates and reduced operator workload compared to conventional teleoperation and shared-autonomy baselines, indicating that conservative value learning provides an effective mechanism for embedding failure awareness into bilateral teleoperation. Experimental videos are available at https://www.youtube.com/watch?v=XDTsvzEkDRE
Controlling Repetition in Protein Language Models
Jan 31, 2026Protein language models (PLMs) have enabled advances in structure prediction and de novo protein design, yet they frequently collapse into pathological repetition during generation. Unlike in text, where repetition merely reduces readability, in proteins it undermines structural confidence and functional viability. To unify this problem, we present the first systematic study of repetition in PLMs. We first propose quantitative metrics to characterize motif-level and homopolymer repetition and then demonstrate their negative impact on folding reliability. To address this challenge, we propose UCCS (Utility-Controlled Contrastive Steering), which steers protein generation with a constrained dataset. Instead of naively contrasting high- vs. low-repetition sequences, we construct contrastive sets that maximize differences in repetition while tightly controlling for structural utility. This disentanglement yields steering vectors that specifically target repetition without degrading foldability. Injected at inference, these vectors consistently reduce repetition without retraining or heuristic decoding. Experiments with ESM-3 and ProtGPT2 in CATH, UniRef50, and SCOP show that our method outperforms decoding penalties and other baselines, substantially lowering repetition while preserving AlphaFold confidence scores. Our results establish repetition control as a central challenge for PLMs and highlight dataset-guided steering as a principled approach for reliable protein generation.
In-Run Data Shapley for Adam Optimizer
Jan 30, 2026Reliable data attribution is essential for mitigating bias and reducing computational waste in modern machine learning, with the Shapley value serving as the theoretical gold standard. While recent "In-Run" methods bypass the prohibitive cost of retraining by estimating contributions dynamically, they heavily rely on the linear structure of Stochastic Gradient Descent (SGD) and fail to capture the complex dynamics of adaptive optimizers like Adam. In this work, we demonstrate that data attribution is inherently optimizer-dependent: we show that SGD-based proxies diverge significantly from true contributions under Adam (Pearson $R \approx 0.11$), rendering them ineffective for modern training pipelines. To bridge this gap, we propose Adam-Aware In-Run Data Shapley. We derive a closed-form approximation that restores additivity by redefining utility under a fixed-state assumption and enable scalable computation via a novel Linearized Ghost Approximation. This technique linearizes the variance-dependent scaling term, allowing us to compute pairwise gradient dot-products without materializing per-sample gradients. Extensive experiments show that our method achieves near-perfect fidelity to ground-truth marginal contributions ($R > 0.99$) while retaining $\sim$95\% of standard training throughput. Furthermore, our Adam-aware attribution significantly outperforms SGD-based baselines in data attribution downstream tasks.
BagIt! An Adaptive Dual-Arm Manipulation of Fabric Bags for Object Bagging
Sep 11, 2025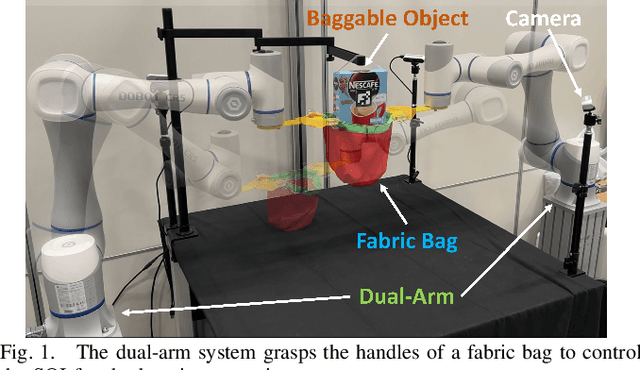
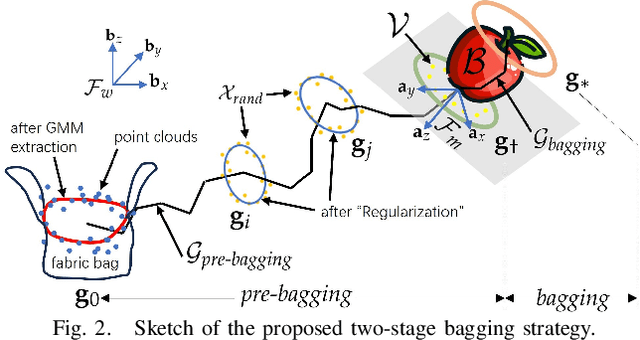
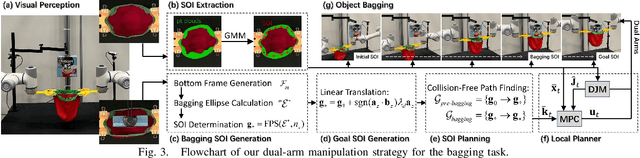
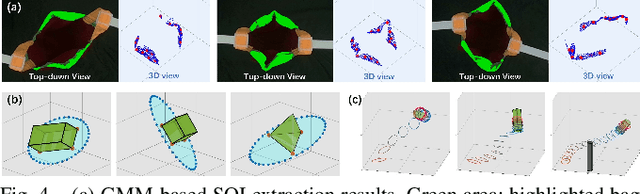
Bagging tasks, commonly found in industrial scenarios, are challenging considering deformable bags' complicated and unpredictable nature. This paper presents an automated bagging system from the proposed adaptive Structure-of-Interest (SOI) manipulation strategy for dual robot arms. The system dynamically adjusts its actions based on real-time visual feedback, removing the need for pre-existing knowledge of bag properties. Our framework incorporates Gaussian Mixture Models (GMM) for estimating SOI states, optimization techniques for SOI generation, motion planning via Constrained Bidirectional Rapidly-exploring Random Tree (CBiRRT), and dual-arm coordination using Model Predictive Control (MPC). Extensive experiments validate the capability of our system to perform precise and robust bagging across various objects, showcasing its adaptability. This work offers a new solution for robotic deformable object manipulation (DOM), particularly in automated bagging tasks. Video of this work is available at https://youtu.be/6JWjCOeTGiQ.
SViP: Sequencing Bimanual Visuomotor Policies with Object-Centric Motion Primitives
Jun 23, 2025Imitation learning (IL), particularly when leveraging high-dimensional visual inputs for policy training, has proven intuitive and effective in complex bimanual manipulation tasks. Nonetheless, the generalization capability of visuomotor policies remains limited, especially when small demonstration datasets are available. Accumulated errors in visuomotor policies significantly hinder their ability to complete long-horizon tasks. To address these limitations, we propose SViP, a framework that seamlessly integrates visuomotor policies into task and motion planning (TAMP). SViP partitions human demonstrations into bimanual and unimanual operations using a semantic scene graph monitor. Continuous decision variables from the key scene graph are employed to train a switching condition generator. This generator produces parameterized scripted primitives that ensure reliable performance even when encountering out-of-the-distribution observations. Using only 20 real-world demonstrations, we show that SViP enables visuomotor policies to generalize across out-of-distribution initial conditions without requiring object pose estimators. For previously unseen tasks, SViP automatically discovers effective solutions to achieve the goal, leveraging constraint modeling in TAMP formulism. In real-world experiments, SViP outperforms state-of-the-art generative IL methods, indicating wider applicability for more complex tasks. Project website: https://sites.google.com/view/svip-bimanual
Understanding Particles From Video: Property Estimation of Granular Materials via Visuo-Haptic Learning
Dec 03, 2024



Granular materials (GMs) are ubiquitous in daily life. Understanding their properties is also important, especially in agriculture and industry. However, existing works require dedicated measurement equipment and also need large human efforts to handle a large number of particles. In this paper, we introduce a method for estimating the relative values of particle size and density from the video of the interaction with GMs. It is trained on a visuo-haptic learning framework inspired by a contact model, which reveals the strong correlation between GM properties and the visual-haptic data during the probe-dragging in the GMs. After training, the network can map the visual modality well to the haptic signal and implicitly characterize the relative distribution of particle properties in its latent embeddings, as interpreted in that contact model. Therefore, we can analyze GM properties using the trained encoder, and only visual information is needed without extra sensory modalities and human efforts for labeling. The presented GM property estimator has been extensively validated via comparison and ablation experiments. The generalization capability has also been evaluated and a real-world application on the beach is also demonstrated. Experiment videos are available at \url{https://sites.google.com/view/gmwork/vhlearning} .
A Haptic-Based Proximity Sensing System for Buried Object in Granular Material
Nov 26, 2024



The proximity perception of objects in granular materials is significant, especially for applications like minesweeping. However, due to particles' opacity and complex properties, existing proximity sensors suffer from high costs from sophisticated hardware and high user-cost from unintuitive results. In this paper, we propose a simple yet effective proximity sensing system for underground stuff based on the haptic feedback of the sensor-granules interaction. We study and employ the unique characteristic of particles -- failure wedge zone, and combine the machine learning method -- Gaussian process regression, to identify the force signal changes induced by the proximity of objects, so as to achieve near-field perception. Furthermore, we design a novel trajectory to control the probe searching in granules for a wide range of perception. Also, our proximity sensing system can adaptively determine optimal parameters for robustness operation in different particles. Experiments demonstrate our system can perceive underground objects over 0.5 to 7 cm in advance among various materials.
EROAM: Event-based Camera Rotational Odometry and Mapping in Real-time
Nov 17, 2024This paper presents EROAM, a novel event-based rotational odometry and mapping system that achieves real-time, accurate camera rotation estimation. Unlike existing approaches that rely on event generation models or contrast maximization, EROAM employs a spherical event representation by projecting events onto a unit sphere and introduces Event Spherical Iterative Closest Point (ES-ICP), a novel geometric optimization framework designed specifically for event camera data. The spherical representation simplifies rotational motion formulation while enabling continuous mapping for enhanced spatial resolution. Combined with parallel point-to-line optimization, EROAM achieves efficient computation without compromising accuracy. Extensive experiments on both synthetic and real-world datasets show that EROAM significantly outperforms state-of-the-art methods in terms of accuracy, robustness, and computational efficiency. Our method maintains consistent performance under challenging conditions, including high angular velocities and extended sequences, where other methods often fail or show significant drift. Additionally, EROAM produces high-quality panoramic reconstructions with preserved fine structural details.
One Fling to Goal: Environment-aware Dynamics for Goal-conditioned Fabric Flinging
Jun 20, 2024



Fabric manipulation dynamically is commonly seen in manufacturing and domestic settings. While dynamically manipulating a fabric piece to reach a target state is highly efficient, this task presents considerable challenges due to the varying properties of different fabrics, complex dynamics when interacting with environments, and meeting required goal conditions. To address these challenges, we present \textit{One Fling to Goal}, an algorithm capable of handling fabric pieces with diverse shapes and physical properties across various scenarios. Our method learns a graph-based dynamics model equipped with environmental awareness. With this dynamics model, we devise a real-time controller to enable high-speed fabric manipulation in one attempt, requiring less than 3 seconds to finish the goal-conditioned task. We experimentally validate our method on a goal-conditioned manipulation task in five diverse scenarios. Our method significantly improves this goal-conditioned task, achieving an average error of 13.2mm in complex scenarios. Our method can be seamlessly transferred to real-world robotic systems and generalized to unseen scenarios in a zero-shot manner.
NeuPAN: Direct Point Robot Navigation with End-to-End Model-based Learning
Mar 11, 2024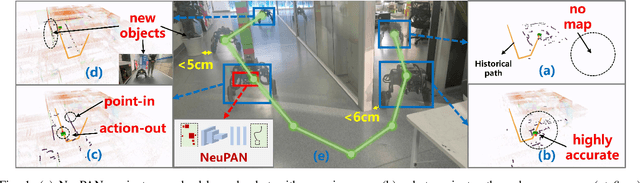

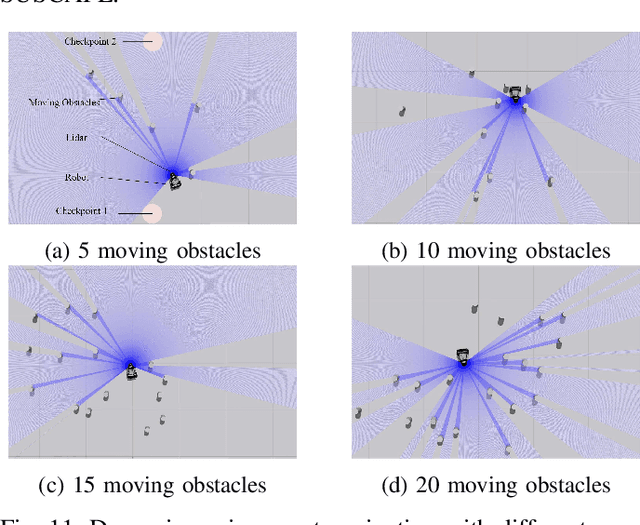
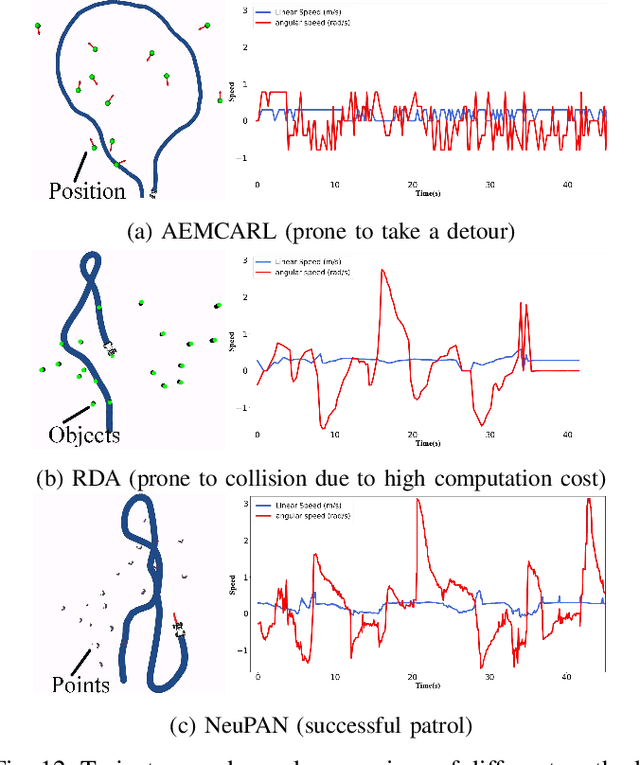
Navigating a nonholonomic robot in a cluttered environment requires extremely accurate perception and locomotion for collision avoidance. This paper presents NeuPAN: a real-time, highly-accurate, map-free, robot-agnostic, and environment-invariant robot navigation solution. Leveraging a tightly-coupled perception-locomotion framework, NeuPAN has two key innovations compared to existing approaches: 1) it directly maps raw points to a learned multi-frame distance space, avoiding error propagation from perception to control; 2) it is interpretable from an end-to-end model-based learning perspective, enabling provable convergence. The crux of NeuPAN is to solve a high-dimensional end-to-end mathematical model with various point-level constraints using the plug-and-play (PnP) proximal alternating-minimization network (PAN) with neurons in the loop. This allows NeuPAN to generate real-time, end-to-end, physically-interpretable motions directly from point clouds, which seamlessly integrates data- and knowledge-engines, where its network parameters are adjusted via back propagation. We evaluate NeuPAN on car-like robot, wheel-legged robot, and passenger autonomous vehicle, in both simulated and real-world environments. Experiments demonstrate that NeuPAN outperforms various benchmarks, in terms of accuracy, efficiency, robustness, and generalization capability across various environments, including the cluttered sandbox, office, corridor, and parking lot. We show that NeuPAN works well in unstructured environments with arbitrary-shape undetectable objects, making impassable ways passable.