 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEROAM: Event-based Camera Rotational Odometry and Mapping in Real-time
Nov 17, 2024This paper presents EROAM, a novel event-based rotational odometry and mapping system that achieves real-time, accurate camera rotation estimation. Unlike existing approaches that rely on event generation models or contrast maximization, EROAM employs a spherical event representation by projecting events onto a unit sphere and introduces Event Spherical Iterative Closest Point (ES-ICP), a novel geometric optimization framework designed specifically for event camera data. The spherical representation simplifies rotational motion formulation while enabling continuous mapping for enhanced spatial resolution. Combined with parallel point-to-line optimization, EROAM achieves efficient computation without compromising accuracy. Extensive experiments on both synthetic and real-world datasets show that EROAM significantly outperforms state-of-the-art methods in terms of accuracy, robustness, and computational efficiency. Our method maintains consistent performance under challenging conditions, including high angular velocities and extended sequences, where other methods often fail or show significant drift. Additionally, EROAM produces high-quality panoramic reconstructions with preserved fine structural details.
One Fling to Goal: Environment-aware Dynamics for Goal-conditioned Fabric Flinging
Jun 20, 2024



Fabric manipulation dynamically is commonly seen in manufacturing and domestic settings. While dynamically manipulating a fabric piece to reach a target state is highly efficient, this task presents considerable challenges due to the varying properties of different fabrics, complex dynamics when interacting with environments, and meeting required goal conditions. To address these challenges, we present \textit{One Fling to Goal}, an algorithm capable of handling fabric pieces with diverse shapes and physical properties across various scenarios. Our method learns a graph-based dynamics model equipped with environmental awareness. With this dynamics model, we devise a real-time controller to enable high-speed fabric manipulation in one attempt, requiring less than 3 seconds to finish the goal-conditioned task. We experimentally validate our method on a goal-conditioned manipulation task in five diverse scenarios. Our method significantly improves this goal-conditioned task, achieving an average error of 13.2mm in complex scenarios. Our method can be seamlessly transferred to real-world robotic systems and generalized to unseen scenarios in a zero-shot manner.
CafkNet: GNN-Empowered Forward Kinematic Modeling for Cable-Driven Parallel Robots
Mar 05, 2024



The Cable-Driven Parallel Robots (CDPRs) have gained significant attention due to their high payload capacity and large workspace. When deploying CDPRs in practice, one of the challenges is kinematic modeling. Unlike serial mechanisms, CDPRs have a simple inverse kinematics problem but a complex forward kinematics (FK) issue. Therefore, the development of accurate and efficient FK solvers has been a prominent research focus in CDPR applications. By observing the topology within CDPRs, in this paper, we propose a graph-based representation to model CDPRs and introduce CafkNet, a fast and general FK solver, leveraging Graph Neural Network (GNN). CafkNet is extensively tested on 3D and 2D CDPRs in different configurations, both in simulators and real scenarios. The results demonstrate its ability to learn CDPRs' internal topology and accurately solve the FK problem. Then, the zero-shot generalization from one configuration to another is validated. Also, the sim2real gap can be bridged by CafkNet using both simulation and real-world data. To the best of our knowledge, it is the first study that employs the GNN to solve FK problem for CDPRs.
TacGNN:Learning Tactile-based In-hand Manipulation with a Blind Robot
Apr 03, 2023



In this paper, we propose a novel framework for tactile-based dexterous manipulation learning with a blind anthropomorphic robotic hand, i.e. without visual sensing. First, object-related states were extracted from the raw tactile signals by a graph-based perception model - TacGNN. The resulting tactile features were then utilized in the policy learning of an in-hand manipulation task in the second stage. This method was examined by a Baoding ball task - simultaneously manipulating two spheres around each other by 180 degrees in hand. We conducted experiments on object states prediction and in-hand manipulation using a reinforcement learning algorithm (PPO). Results show that TacGNN is effective in predicting object-related states during manipulation by decreasing the RMSE of prediction to 0.096cm comparing to other methods, such as MLP, CNN, and GCN. Finally, the robot hand could finish an in-hand manipulation task solely relying on the robotic own perception - tactile sensing and proprioception. In addition, our methods are tested on three tasks with different difficulty levels and transferred to the real robot without further training.
Learning-based Optoelectronically Innervated Tactile Finger for Rigid-Soft Interactive Grasping
Jan 29, 2021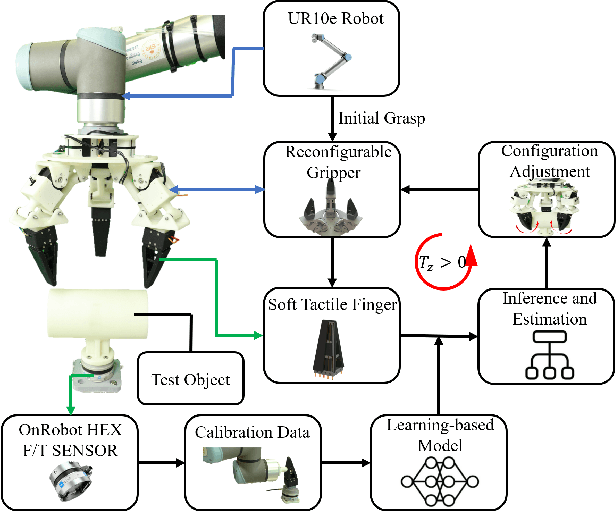
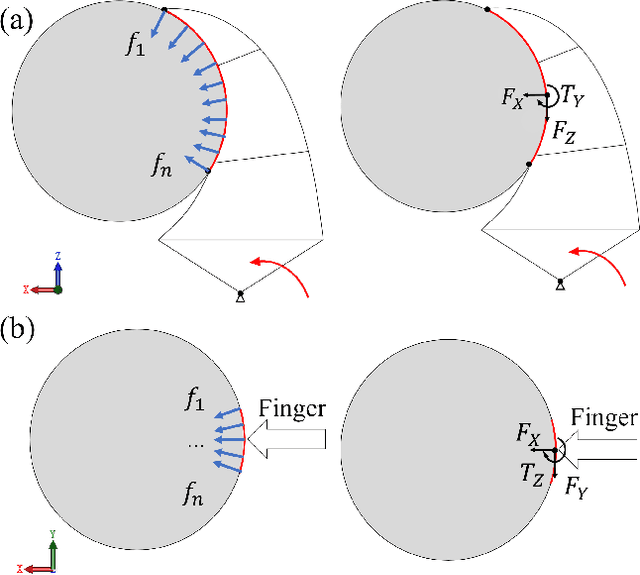
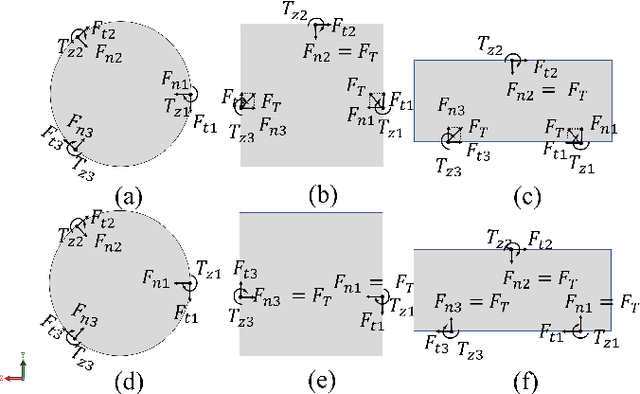
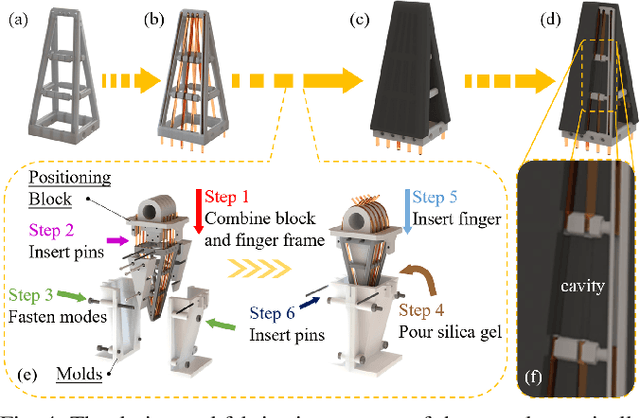
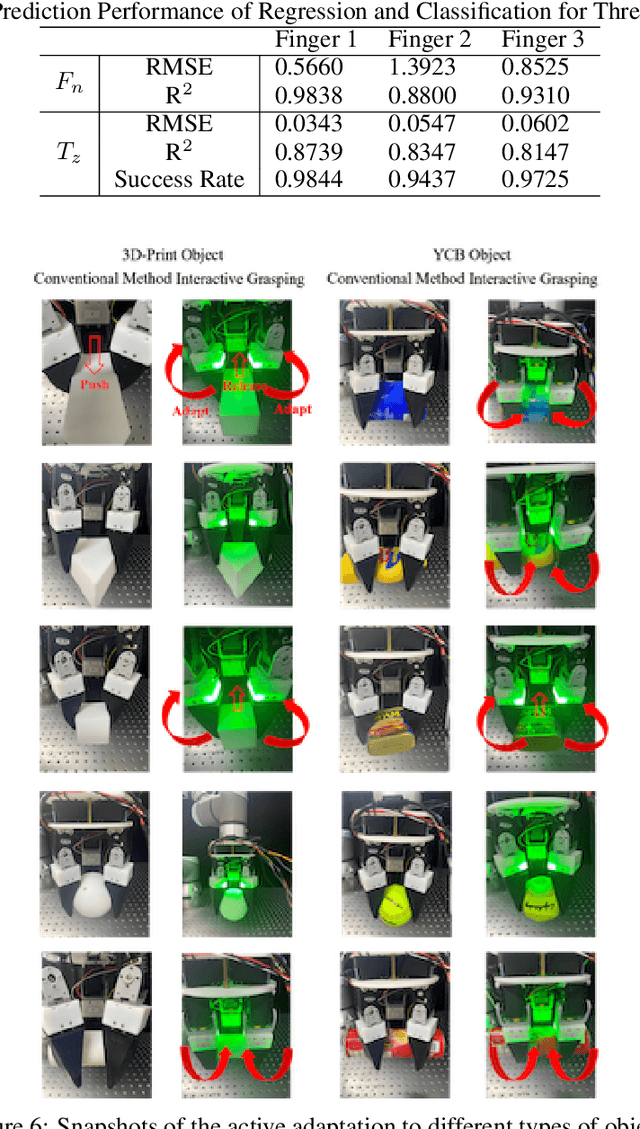
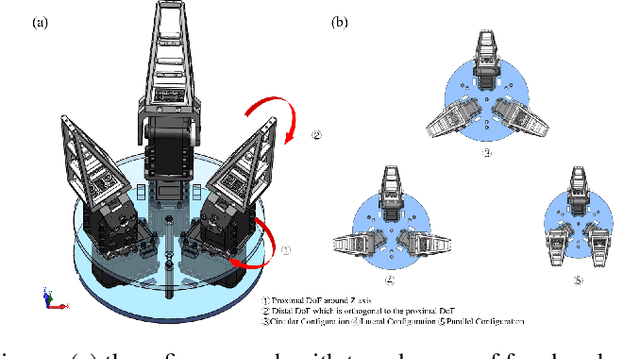
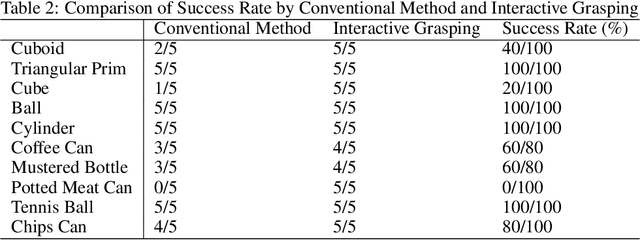
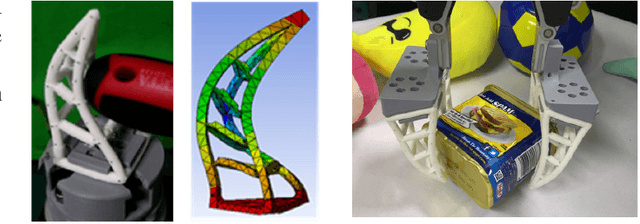
This paper presents a novel design of a soft tactile finger with omni-directional adaptation using multi-channel optical fibers for rigid-soft interactive grasping. Machine learning methods are used to train a model for real-time prediction of force, torque, and contact using the tactile data collected. We further integrated such fingers in a reconfigurable gripper design with three fingers so that the finger arrangement can be actively adjusted in real-time based on the tactile data collected during grasping, achieving the process of rigid-soft interactive grasping. Detailed sensor calibration and experimental results are also included to further validate the proposed design for enhanced grasping robustness.
Design of an Optoelectronically Innervated Gripper for Rigid-Soft Interactive Grasping
Dec 06, 2020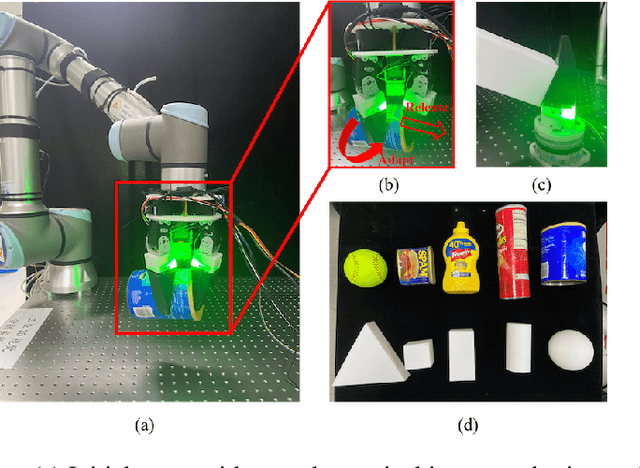
Over the past few decades, efforts have been made towards robust robotic grasping, and therefore dexterous manipulation. The soft gripper has shown their potential in robust grasping due to their inherent properties-low, control complexity, and high adaptability. However, the deformation of the soft gripper when interacting with objects bring inaccuracy of grasped objects, which causes instability for robust grasping and further manipulation. In this paper, we present an omni-directional adaptive soft finger that can sense deformation based on embedded optical fibers and the application of machine learning methods to interpret transmitted light intensities. Furthermore, to use tactile information provided by a soft finger, we design a low-cost and multi degrees of freedom gripper to conform to the shape of objects actively and optimize grasping policy, which is called Rigid-Soft Interactive Grasping. Two main advantages of this grasping policy are provided: one is that a more robust grasping could be achieved through an active adaptation; the other is that the tactile information collected could be helpful for further manipulation.
DeepClaw: A Robotic Hardware Benchmarking Platform for Learning Object Manipulation
May 06, 2020
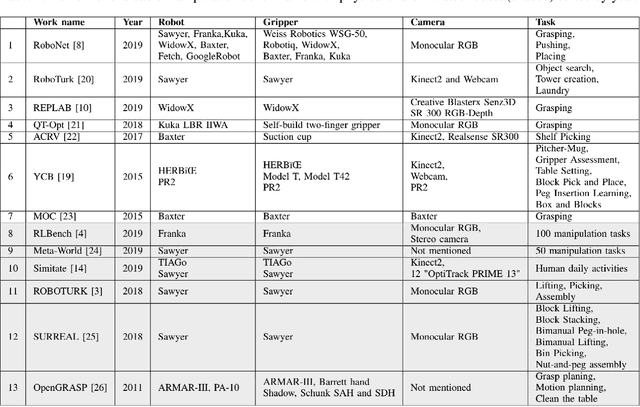
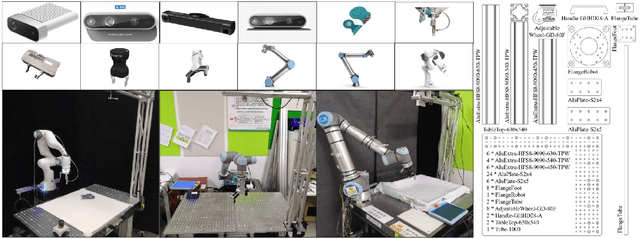
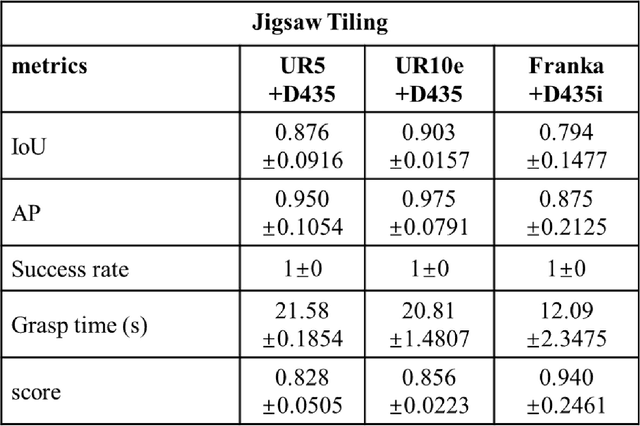
We present DeepClaw as a reconfigurable benchmark of robotic hardware and task hierarchy for robot learning. The DeepClaw benchmark aims at a mechatronics perspective of the robot learning problem, which features a minimum design of robot cell that can be easily reconfigured to host robot hardware from various vendors, including manipulators, grippers, cameras, desks, and objects, aiming at a streamlined collection of physical manipulation data and evaluation of the learned skills for hardware benchmarking. We provide a detailed design of the robot cell with readily available parts to build the experiment environment that can host a wide range of robotic hardware commonly adopted for robot learning. We also propose a hierarchical pipeline of software integration, including localization, recognition, grasp planning, and motion planning, to streamline learning-based robot control, data collection, and experiment validation towards shareability and reproducibility. We present benchmarking results of the DeepClaw system for a baseline Tic-Tac-Toe task, a bin-clearing task, and a jigsaw puzzle task using three sets of standard robotic hardware. Our results show that tasks defined in DeepClaw can be easily reproduced on three robot cells. Under the same task setup, the differences in robotic hardware used will present a non-negligible impact on the performance metrics of robot learning. All design layouts and codes are hosted on Github for open access.
Rigid-Soft Interactive Learning for Robust Grasping
Feb 29, 2020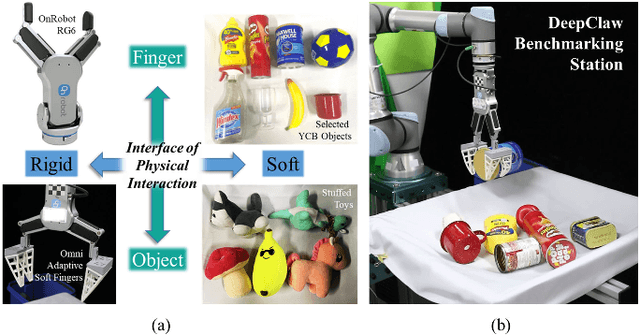
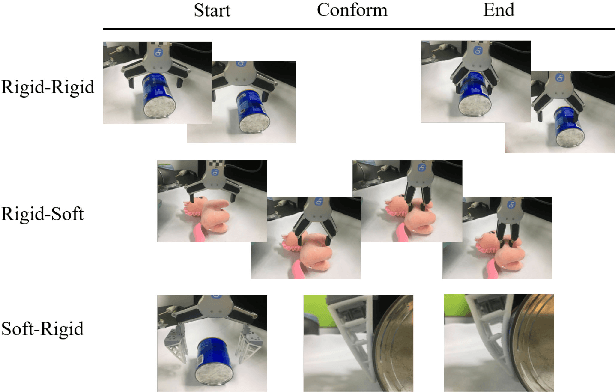
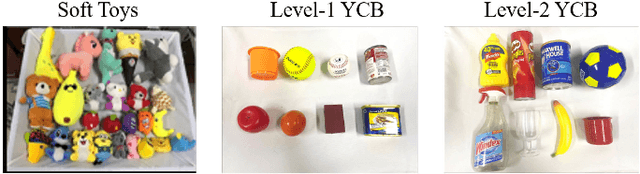
Inspired by widely used soft fingers on grasping, we propose a method of rigid-soft interactive learning, aiming at reducing the time of data collection. In this paper, we classify the interaction categories into Rigid-Rigid, Rigid-Soft, Soft-Rigid according to the interaction surface between grippers and target objects. We find experimental evidence that the interaction types between grippers and target objects play an essential role in the learning methods. We use soft, stuffed toys for training, instead of everyday objects, to reduce the integration complexity and computational burden and exploit such rigid-soft interaction by changing the gripper fingers to the soft ones when dealing with rigid, daily-life items such as the Yale-CMU-Berkeley (YCB) objects. With a small data collection of 5K picking attempts in total, our results suggest that such Rigid-Soft and Soft-Rigid interactions are transferable. Moreover, the combination of different grasp types shows better performance on the grasping test. We achieve the best grasping performance at 97.5\% for easy YCB objects and 81.3\% for difficult YCB objects while using a precise grasp with a two-soft-finger gripper to collect training data and power grasp with a four-soft-finger gripper to test.