 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Task-Driven Diffusion-Based Policy with Affordance Learning for Generalizable Manipulation of Articulated Objects
Sep 18, 2025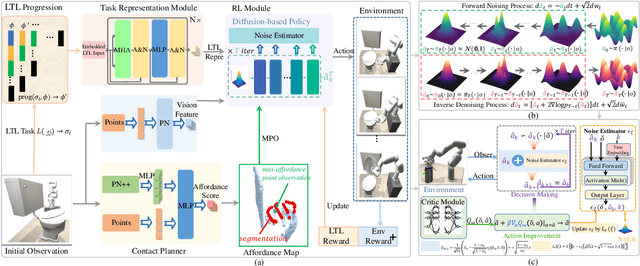
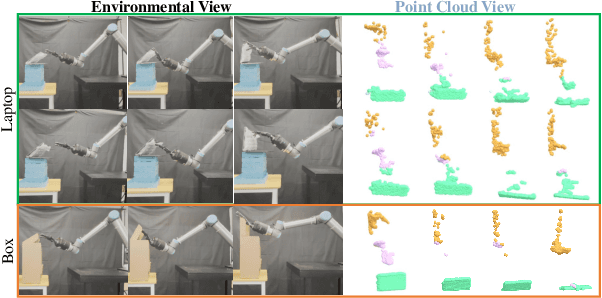

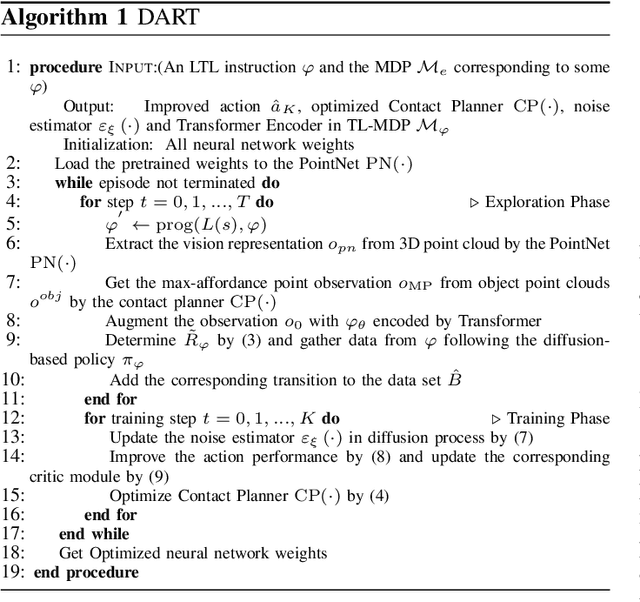
Despite recent advances in dexterous manipulations, the manipulation of articulated objects and generalization across different categories remain significant challenges. To address these issues, we introduce DART, a novel framework that enhances a diffusion-based policy with affordance learning and linear temporal logic (LTL) representations to improve the learning efficiency and generalizability of articulated dexterous manipulation. Specifically, DART leverages LTL to understand task semantics and affordance learning to identify optimal interaction points. The {diffusion-based policy} then generalizes these interactions across various categories. Additionally, we exploit an optimization method based on interaction data to refine actions, overcoming the limitations of traditional diffusion policies that typically rely on offline reinforcement learning or learning from demonstrations. Experimental results demonstrate that DART outperforms most existing methods in manipulation ability, generalization performance, transfer reasoning, and robustness. For more information, visit our project website at: https://sites.google.com/view/dart0257/.
CafkNet: GNN-Empowered Forward Kinematic Modeling for Cable-Driven Parallel Robots
Mar 05, 2024



The Cable-Driven Parallel Robots (CDPRs) have gained significant attention due to their high payload capacity and large workspace. When deploying CDPRs in practice, one of the challenges is kinematic modeling. Unlike serial mechanisms, CDPRs have a simple inverse kinematics problem but a complex forward kinematics (FK) issue. Therefore, the development of accurate and efficient FK solvers has been a prominent research focus in CDPR applications. By observing the topology within CDPRs, in this paper, we propose a graph-based representation to model CDPRs and introduce CafkNet, a fast and general FK solver, leveraging Graph Neural Network (GNN). CafkNet is extensively tested on 3D and 2D CDPRs in different configurations, both in simulators and real scenarios. The results demonstrate its ability to learn CDPRs' internal topology and accurately solve the FK problem. Then, the zero-shot generalization from one configuration to another is validated. Also, the sim2real gap can be bridged by CafkNet using both simulation and real-world data. To the best of our knowledge, it is the first study that employs the GNN to solve FK problem for CDPRs.
LimeAttack: Local Explainable Method for Textual Hard-Label Adversarial Attack
Aug 01, 2023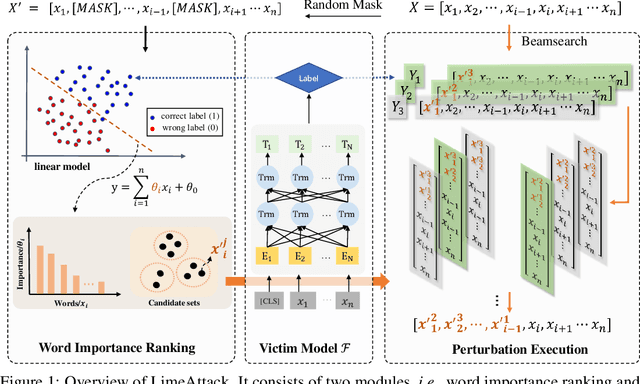
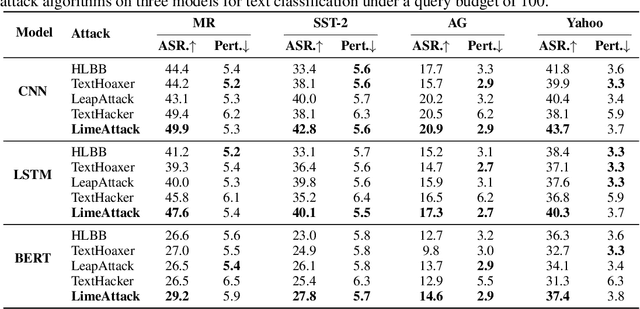
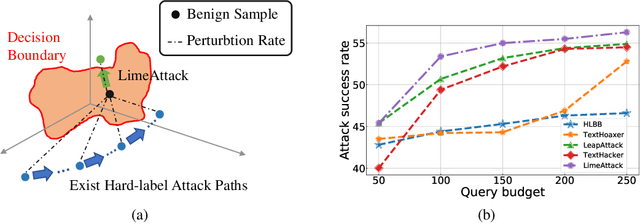
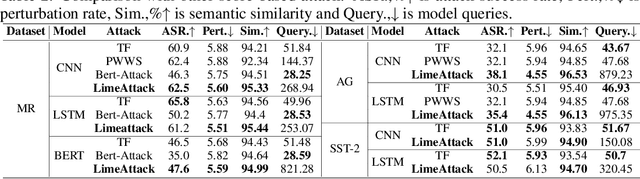
Natural language processing models are vulnerable to adversarial examples. Previous textual adversarial attacks adopt gradients or confidence scores to calculate word importance ranking and generate adversarial examples. However, this information is unavailable in the real world. Therefore, we focus on a more realistic and challenging setting, named hard-label attack, in which the attacker can only query the model and obtain a discrete prediction label. Existing hard-label attack algorithms tend to initialize adversarial examples by random substitution and then utilize complex heuristic algorithms to optimize the adversarial perturbation. These methods require a lot of model queries and the attack success rate is restricted by adversary initialization. In this paper, we propose a novel hard-label attack algorithm named LimeAttack, which leverages a local explainable method to approximate word importance ranking, and then adopts beam search to find the optimal solution. Extensive experiments show that LimeAttack achieves the better attacking performance compared with existing hard-label attack under the same query budget. In addition, we evaluate the effectiveness of LimeAttack on large language models, and results indicate that adversarial examples remain a significant threat to large language models. The adversarial examples crafted by LimeAttack are highly transferable and effectively improve model robustness in adversarial training.
Temporal Logic Guided Motion Primitives for Complex Manipulation Tasks with User Preferences
Feb 09, 2022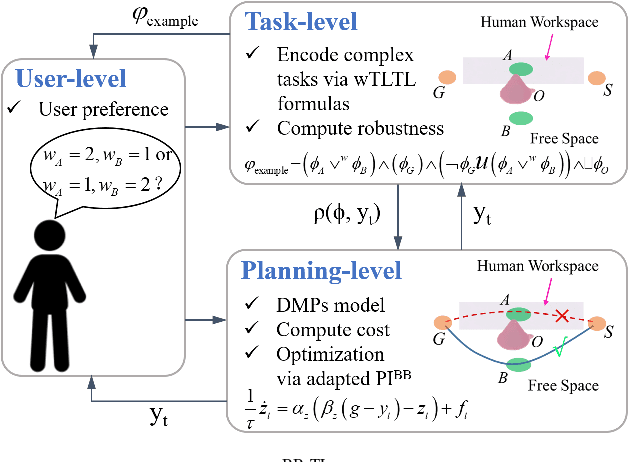
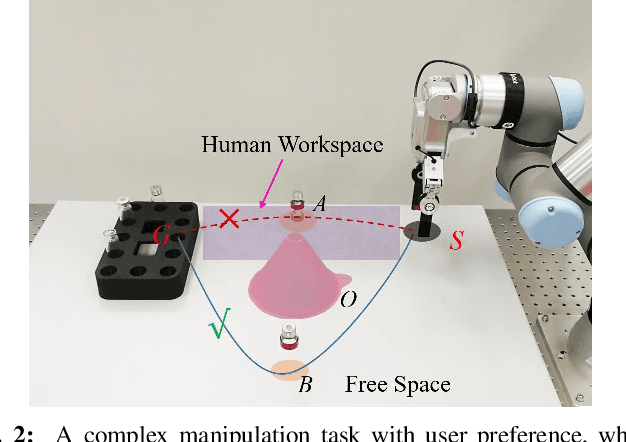


Dynamic movement primitives (DMPs) are a flexible trajectory learning scheme widely used in motion generation of robotic systems. However, existing DMP-based methods mainly focus on simple go-to-goal tasks. Motivated to handle tasks beyond point-to-point motion planning, this work presents temporal logic guided optimization of motion primitives, namely PIBB-TL algorithm, for complex manipulation tasks with user preferences. In particular, weighted truncated linear temporal logic (wTLTL) is incorporated in the PIBB-TL algorithm, which not only enables the encoding of complex tasks that involve a sequence of logically organized action plans with user preferences, but also provides a convenient and efficient means to design the cost function. The black-box optimization is then adapted to identify optimal shape parameters of DMPs to enable motion planning of robotic systems. The effectiveness of the PIBB-TL algorithm is demonstrated via simulation and experime