 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContact-Aware Motion Planning Among Movable Objects
Feb 05, 2025Most existing methods for motion planning of mobile robots involve generating collision-free trajectories. However, these methods focusing solely on contact avoidance may limit the robots' locomotion and can not be applied to tasks where contact is inevitable or intentional. To address these issues, we propose a novel contact-aware motion planning (CAMP) paradigm for robotic systems. Our approach incorporates contact between robots and movable objects as complementarity constraints in optimization-based trajectory planning. By leveraging augmented Lagrangian methods (ALMs), we efficiently solve the optimization problem with complementarity constraints, producing spatial-temporal optimal trajectories of the robots. Simulations demonstrate that, compared to the state-of-the-art method, our proposed CAMP method expands the reachable space of mobile robots, resulting in a significant improvement in the success rate of two types of fundamental tasks: navigation among movable objects (NAMO) and rearrangement of movable objects (RAMO). Real-world experiments show that the trajectories generated by our proposed method are feasible and quickly deployed in different tasks.
AutoTrans: A Complete Planning and Control Framework for Autonomous UAV Payload Transportation
Oct 23, 2023The robotics community is increasingly interested in autonomous aerial transportation. Unmanned aerial vehicles with suspended payloads have advantages over other systems, including mechanical simplicity and agility, but pose great challenges in planning and control. To realize fully autonomous aerial transportation, this paper presents a systematic solution to address these difficulties. First, we present a real-time planning method that generates smooth trajectories considering the time-varying shape and non-linear dynamics of the system, ensuring whole-body safety and dynamic feasibility. Additionally, an adaptive NMPC with a hierarchical disturbance compensation strategy is designed to overcome unknown external perturbations and inaccurate model parameters. Extensive experiments show that our method is capable of generating high-quality trajectories online, even in highly constrained environments, and tracking aggressive flight trajectories accurately, even under significant uncertainty. We plan to release our code to benefit the community.
Jigsaw-based Benchmarking for Learning Robotic Manipulation
Jun 08, 2023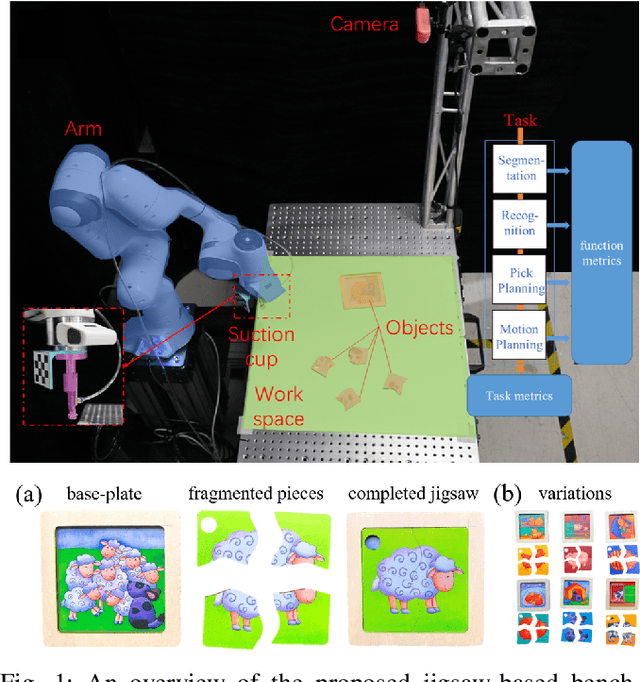
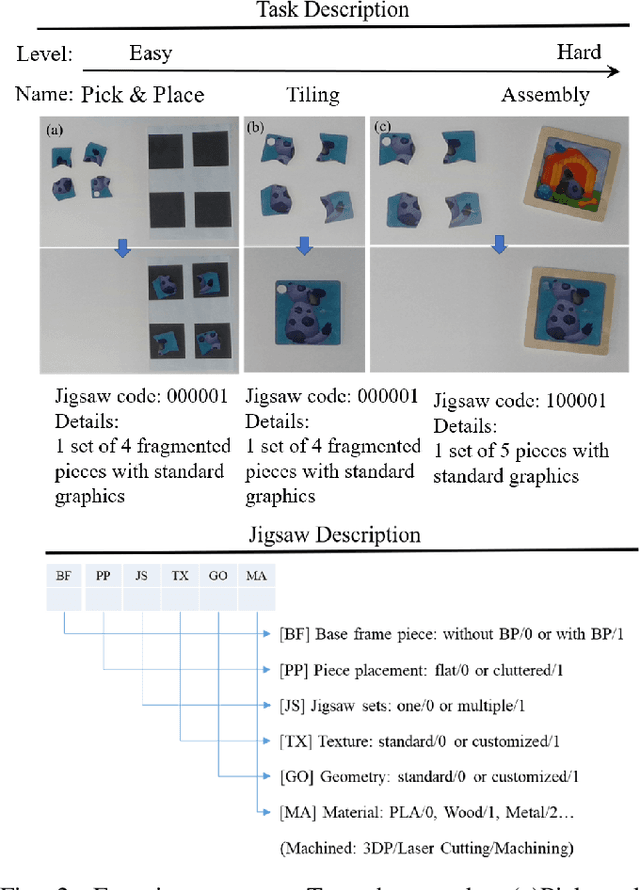
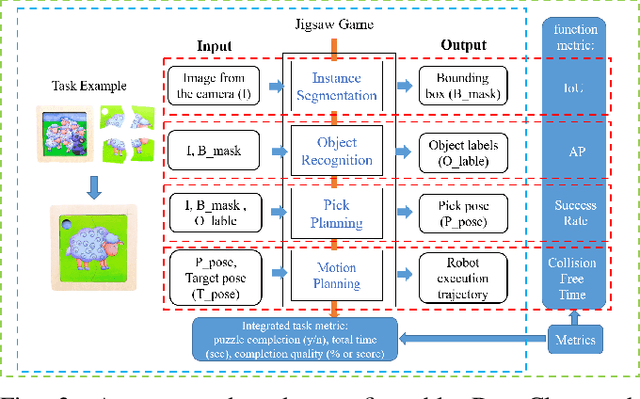
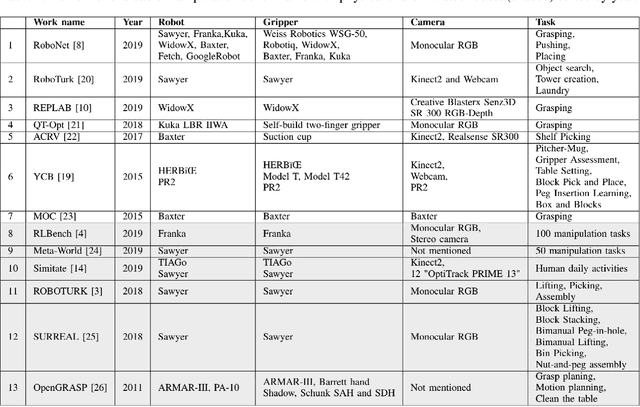
Benchmarking provides experimental evidence of the scientific baseline to enhance the progression of fundamental research, which is also applicable to robotics. In this paper, we propose a method to benchmark metrics of robotic manipulation, which addresses the spatial-temporal reasoning skills for robot learning with the jigsaw game. In particular, our approach exploits a simple set of jigsaw pieces by designing a structured protocol, which can be highly customizable according to a wide range of task specifications. Researchers can selectively adopt the proposed protocol to benchmark their research outputs, on a comparable scale in the functional, task, and system-level of details. The purpose is to provide a potential look-up table for learning-based robot manipulation, commonly available in other engineering disciplines, to facilitate the adoption of robotics through calculated, empirical, and systematic experimental evidence.
DeepClaw: A Robotic Hardware Benchmarking Platform for Learning Object Manipulation
May 06, 2020
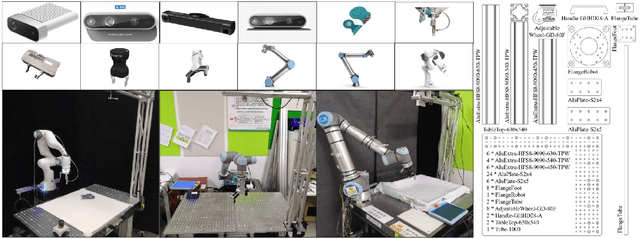
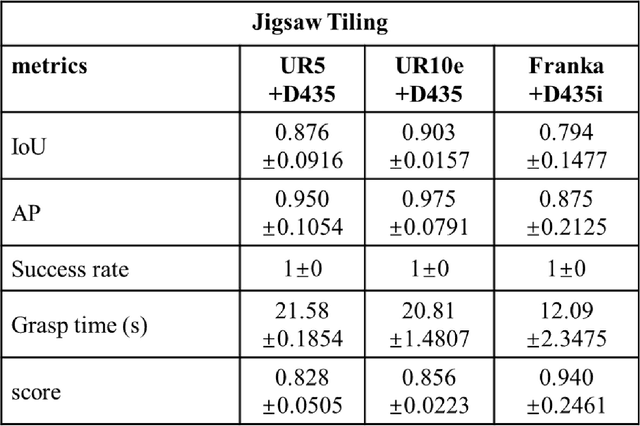
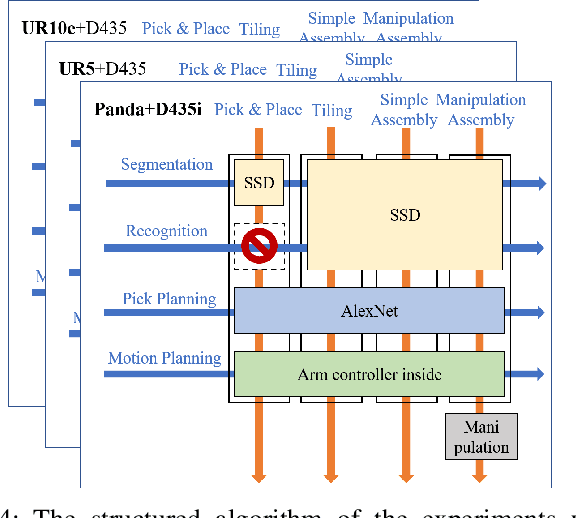
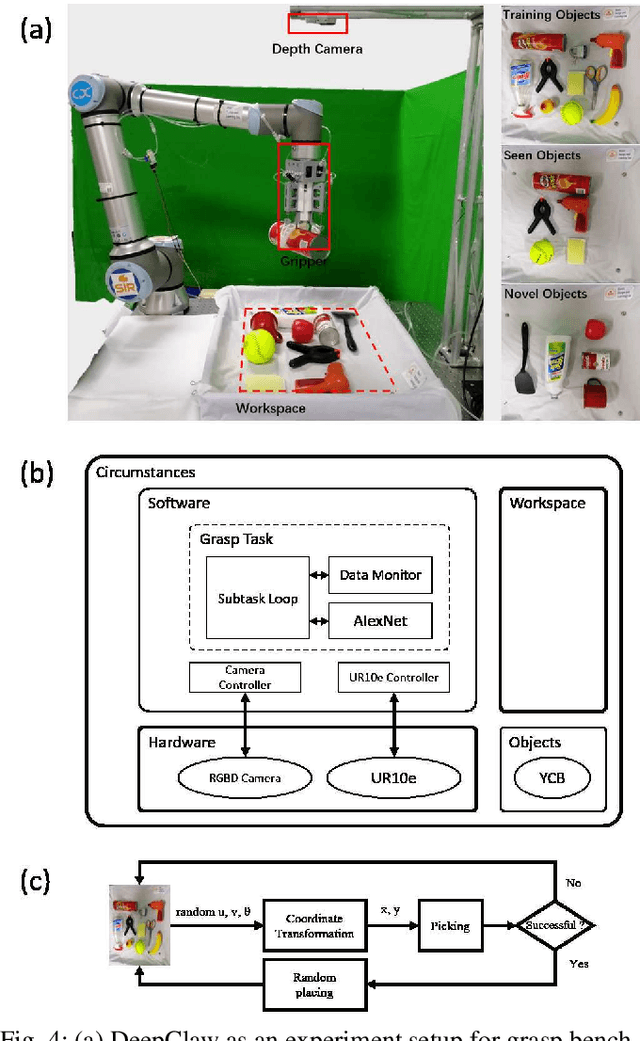
We present DeepClaw as a reconfigurable benchmark of robotic hardware and task hierarchy for robot learning. The DeepClaw benchmark aims at a mechatronics perspective of the robot learning problem, which features a minimum design of robot cell that can be easily reconfigured to host robot hardware from various vendors, including manipulators, grippers, cameras, desks, and objects, aiming at a streamlined collection of physical manipulation data and evaluation of the learned skills for hardware benchmarking. We provide a detailed design of the robot cell with readily available parts to build the experiment environment that can host a wide range of robotic hardware commonly adopted for robot learning. We also propose a hierarchical pipeline of software integration, including localization, recognition, grasp planning, and motion planning, to streamline learning-based robot control, data collection, and experiment validation towards shareability and reproducibility. We present benchmarking results of the DeepClaw system for a baseline Tic-Tac-Toe task, a bin-clearing task, and a jigsaw puzzle task using three sets of standard robotic hardware. Our results show that tasks defined in DeepClaw can be easily reproduced on three robot cells. Under the same task setup, the differences in robotic hardware used will present a non-negligible impact on the performance metrics of robot learning. All design layouts and codes are hosted on Github for open access.
Rigid-Soft Interactive Learning for Robust Grasping
Feb 29, 2020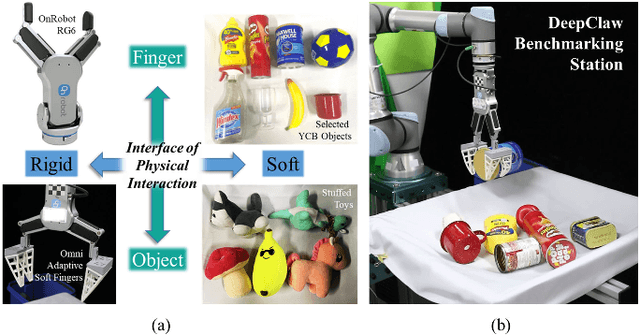
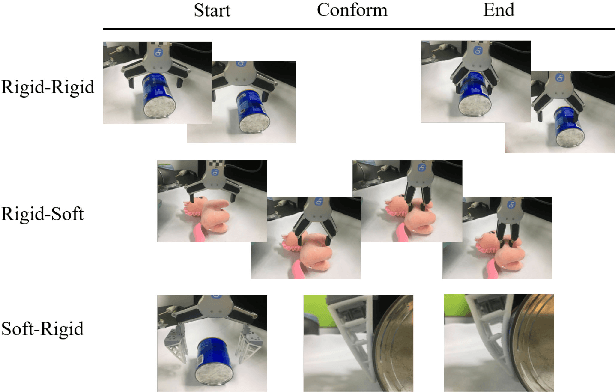
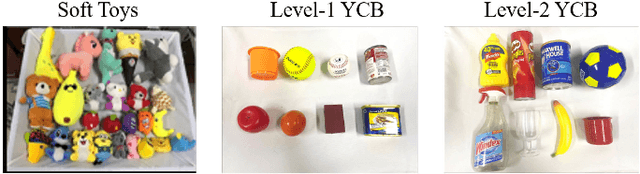
Inspired by widely used soft fingers on grasping, we propose a method of rigid-soft interactive learning, aiming at reducing the time of data collection. In this paper, we classify the interaction categories into Rigid-Rigid, Rigid-Soft, Soft-Rigid according to the interaction surface between grippers and target objects. We find experimental evidence that the interaction types between grippers and target objects play an essential role in the learning methods. We use soft, stuffed toys for training, instead of everyday objects, to reduce the integration complexity and computational burden and exploit such rigid-soft interaction by changing the gripper fingers to the soft ones when dealing with rigid, daily-life items such as the Yale-CMU-Berkeley (YCB) objects. With a small data collection of 5K picking attempts in total, our results suggest that such Rigid-Soft and Soft-Rigid interactions are transferable. Moreover, the combination of different grasp types shows better performance on the grasping test. We achieve the best grasping performance at 97.5\% for easy YCB objects and 81.3\% for difficult YCB objects while using a precise grasp with a two-soft-finger gripper to collect training data and power grasp with a four-soft-finger gripper to test.
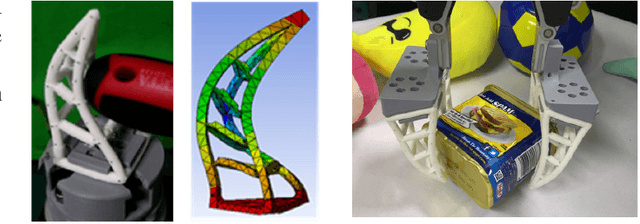
Reconfigurable Design for Omni-adaptive Grasp Learning
Feb 29, 2020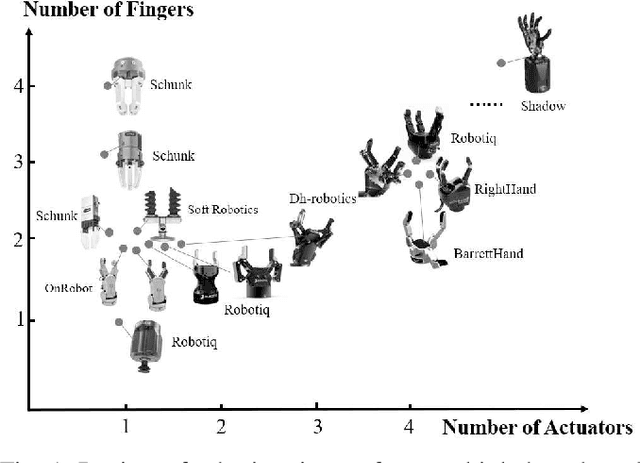
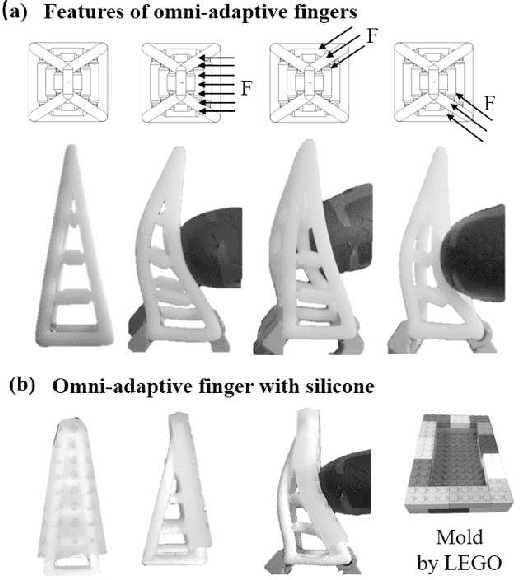
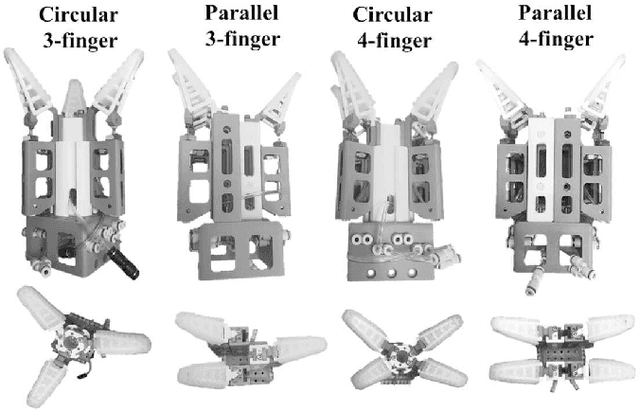
The engineering design of robotic grippers presents an ample design space for optimization towards robust grasping. In this paper, we adopt the reconfigurable design of the robotic gripper using a novel soft finger structure with omni-directional adaptation, which generates a large number of possible gripper configurations by rearranging these fingers. Such reconfigurable design with these omni-adaptive fingers enables us to systematically investigate the optimal arrangement of the fingers towards robust grasping. Furthermore, we adopt a learning-based method as the baseline to benchmark the effectiveness of each design configuration. As a result, we found that a 3-finger and 4-finger radial configuration is the most effective one achieving an average 96\% grasp success rate on seen and novel objects selected from the YCB dataset. We also discussed the influence of the frictional surface on the finger to improve the grasp robustness.