 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJigsaw-based Benchmarking for Learning Robotic Manipulation
Paper and Code
Jun 08, 2023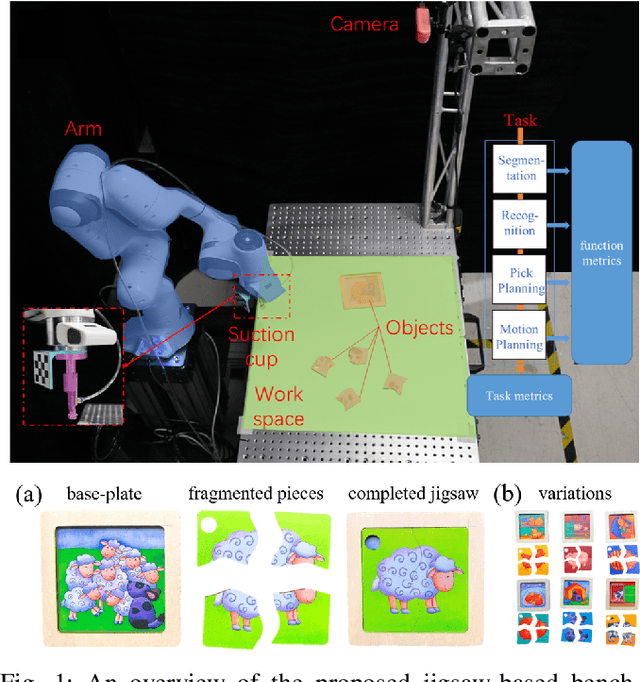
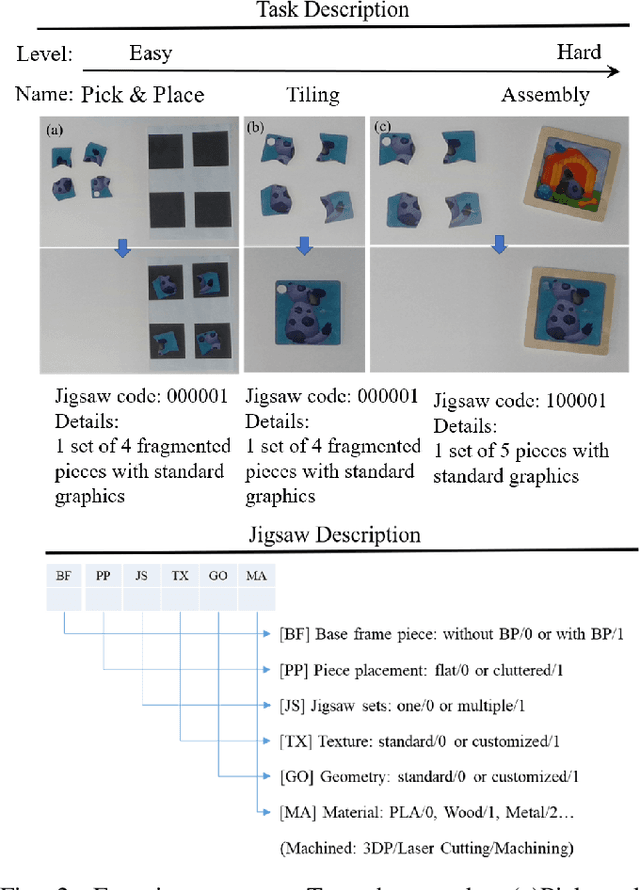
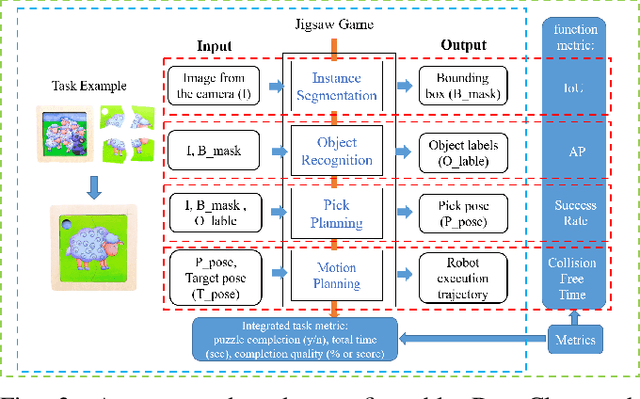
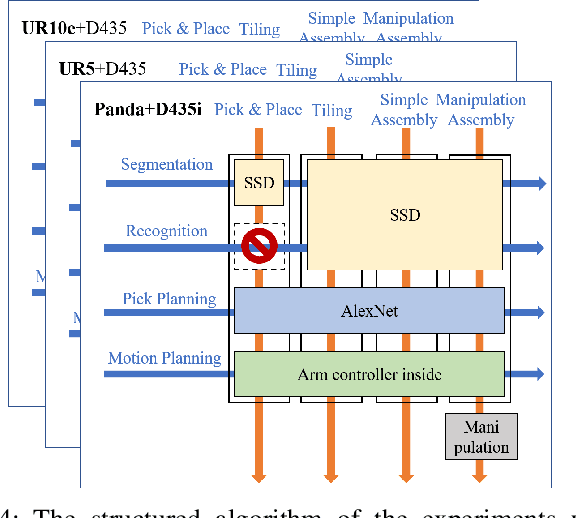
Benchmarking provides experimental evidence of the scientific baseline to enhance the progression of fundamental research, which is also applicable to robotics. In this paper, we propose a method to benchmark metrics of robotic manipulation, which addresses the spatial-temporal reasoning skills for robot learning with the jigsaw game. In particular, our approach exploits a simple set of jigsaw pieces by designing a structured protocol, which can be highly customizable according to a wide range of task specifications. Researchers can selectively adopt the proposed protocol to benchmark their research outputs, on a comparable scale in the functional, task, and system-level of details. The purpose is to provide a potential look-up table for learning-based robot manipulation, commonly available in other engineering disciplines, to facilitate the adoption of robotics through calculated, empirical, and systematic experimental evidence.