Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-based Optoelectronically Innervated Tactile Finger for Rigid-Soft Interactive Grasping
Paper and Code
Jan 29, 2021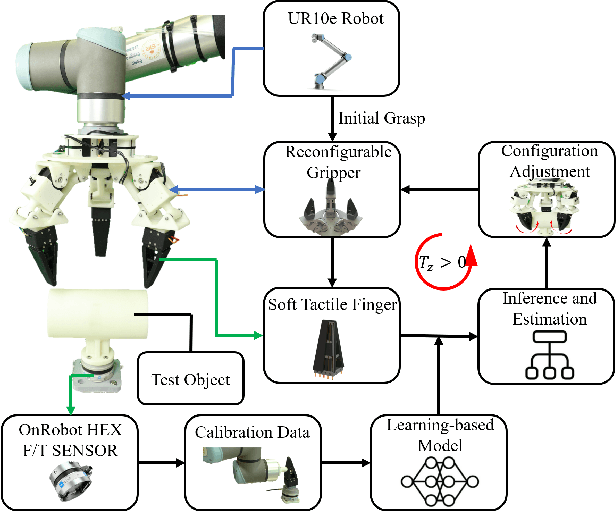
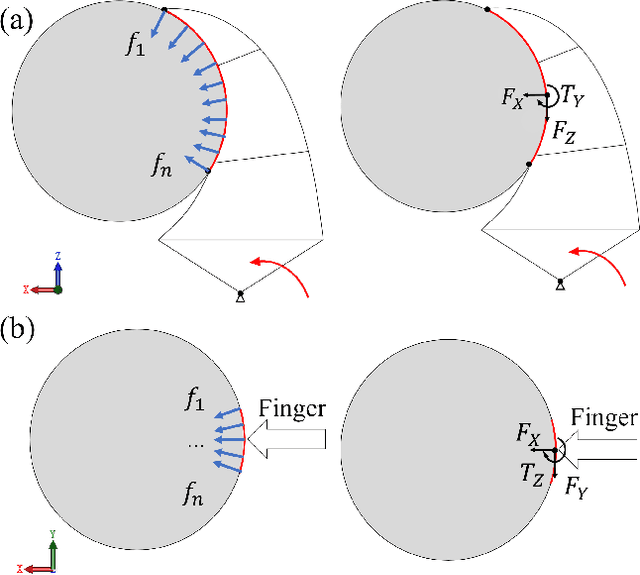
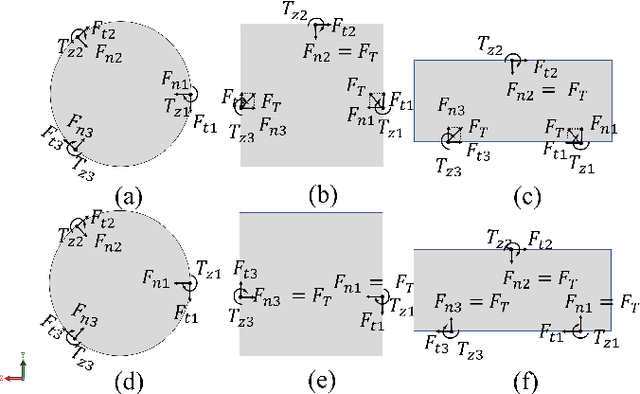
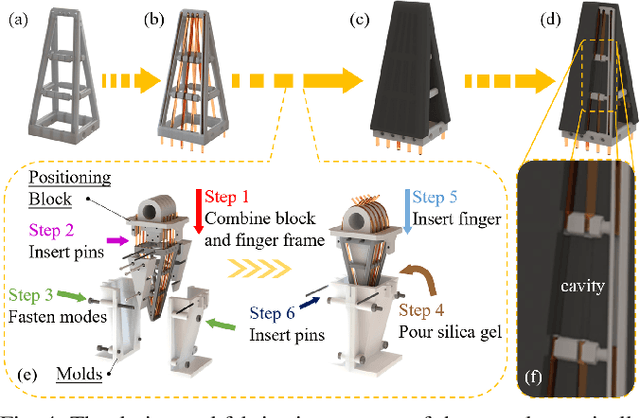
This paper presents a novel design of a soft tactile finger with omni-directional adaptation using multi-channel optical fibers for rigid-soft interactive grasping. Machine learning methods are used to train a model for real-time prediction of force, torque, and contact using the tactile data collected. We further integrated such fingers in a reconfigurable gripper design with three fingers so that the finger arrangement can be actively adjusted in real-time based on the tactile data collected during grasping, achieving the process of rigid-soft interactive grasping. Detailed sensor calibration and experimental results are also included to further validate the proposed design for enhanced grasping robustness.
* 8 pages,9 figures, Submitted to RAL and ICRA2021
View paper on