 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBiCoord: A Bimanual Manipulation Benchmark towards Long-Horizon Spatial-Temporal Coordination
Apr 07, 2026Bimanual manipulation, i.e., the coordinated use of two robotic arms to complete tasks, is essential for achieving human-level dexterity in robotics. Recent simulation benchmarks, e.g., RoboTwin and RLBench2, have advanced data-driven learning for bimanual manipulation. However, existing tasks are short-horizon and only loosely coordinated, failing to capture the spatial-temporal coupling inherent in real-world bimanual behaviors. To address this gap, we introduce BiCoord, a benchmark for long-horizon and tightly coordinated bimanual manipulation. Specifically, BiCoord comprises diverse tasks that require continuous inter-arm dependency and dynamic role exchange across multiple sub-goals. Also, we propose a suite of quantitative metrics that evaluate coordination from temporal, spatial, and spatial-temporal perspectives, enabling systematic measurement of bimanual cooperation. Experimental results show that representative manipulation policies, e.g., DP, RDT, Pi0, and OpenVLA-OFT, struggle with long-duration and highly coupled tasks, revealing fundamental challenges in achieving long-horizon and tight coordination tasks. We hope BiCoord can serve as a foundation for studying long-horizon cooperative manipulation and inspire future research on coordination-aware robotic learning. All datasets, codes and supplements could be found at https://buaa-colalab.github.io/BiCoord/.
OctoNav: Towards Generalist Embodied Navigation
Jun 11, 2025Embodied navigation stands as a foundation pillar within the broader pursuit of embodied AI. However, previous navigation research is divided into different tasks/capabilities, e.g., ObjNav, ImgNav and VLN, where they differ in task objectives and modalities, making datasets and methods are designed individually. In this work, we take steps toward generalist navigation agents, which can follow free-form instructions that include arbitrary compounds of multi-modal and multi-capability. To achieve this, we propose a large-scale benchmark and corresponding method, termed OctoNav-Bench and OctoNav-R1. Specifically, OctoNav-Bench features continuous environments and is constructed via a designed annotation pipeline. We thoroughly craft instruction-trajectory pairs, where instructions are diverse in free-form with arbitrary modality and capability. Also, we construct a Think-Before-Action (TBA-CoT) dataset within OctoNav-Bench to provide the thinking process behind actions. For OctoNav-R1, we build it upon MLLMs and adapt it to a VLA-type model, which can produce low-level actions solely based on 2D visual observations. Moreover, we design a Hybrid Training Paradigm (HTP) that consists of three stages, i.e., Action-/TBA-SFT, Nav-GPRO, and Online RL stages. Each stage contains specifically designed learning policies and rewards. Importantly, for TBA-SFT and Nav-GRPO designs, we are inspired by the OpenAI-o1 and DeepSeek-R1, which show impressive reasoning ability via thinking-before-answer. Thus, we aim to investigate how to achieve thinking-before-action in the embodied navigation field, to improve model's reasoning ability toward generalists. Specifically, we propose TBA-SFT to utilize the TBA-CoT dataset to fine-tune the model as a cold-start phrase and then leverage Nav-GPRO to improve its thinking ability. Finally, OctoNav-R1 shows superior performance compared with previous methods.
Safety2Drive: Safety-Critical Scenario Benchmark for the Evaluation of Autonomous Driving
May 20, 2025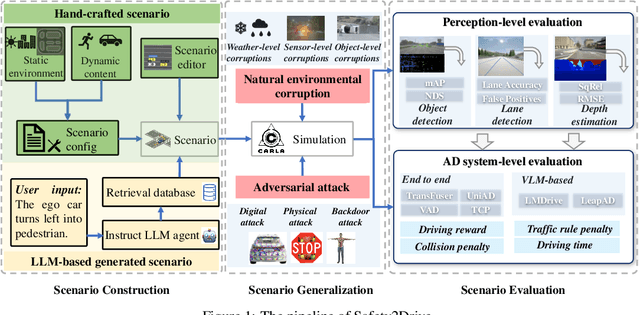

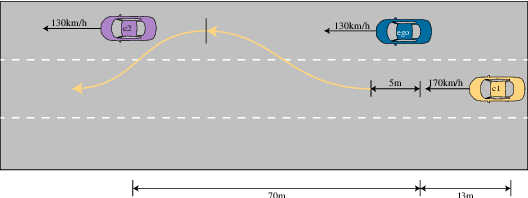
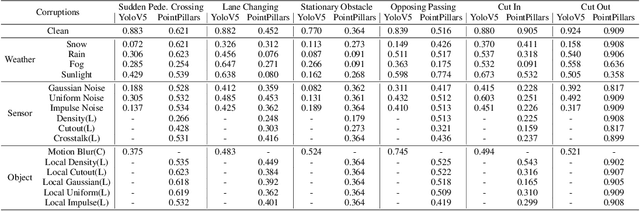
Autonomous Driving (AD) systems demand the high levels of safety assurance. Despite significant advancements in AD demonstrated on open-source benchmarks like Longest6 and Bench2Drive, existing datasets still lack regulatory-compliant scenario libraries for closed-loop testing to comprehensively evaluate the functional safety of AD. Meanwhile, real-world AD accidents are underrepresented in current driving datasets. This scarcity leads to inadequate evaluation of AD performance, posing risks to safety validation and practical deployment. To address these challenges, we propose Safety2Drive, a safety-critical scenario library designed to evaluate AD systems. Safety2Drive offers three key contributions. (1) Safety2Drive comprehensively covers the test items required by standard regulations and contains 70 AD function test items. (2) Safety2Drive supports the safety-critical scenario generalization. It has the ability to inject safety threats such as natural environment corruptions and adversarial attacks cross camera and LiDAR sensors. (3) Safety2Drive supports multi-dimensional evaluation. In addition to the evaluation of AD systems, it also supports the evaluation of various perception tasks, such as object detection and lane detection. Safety2Drive provides a paradigm from scenario construction to validation, establishing a standardized test framework for the safe deployment of AD.
Robust Beamforming Design for STAR-RIS Aided RSMA Network with Hardware Impairments
May 13, 2025In this article, we investigate the robust beamforming design for a simultaneous transmitting and reflecting reconfigurable intelligent surface (STAR-RIS) aided downlink rate-splitting multiple access (RSMA) communication system, where both transceivers and STAR-RIS suffer from the impact of hardware impairments (HWI). A base station (BS) is deployed to transmit messages concurrently to multiple users, utilizing a STAR-RIS to improve communication quality and expand user coverage. We aim to maximize the achievable sum rate of the users while ensuring the constraints of transmit power, STAR-RIS coefficients, and the actual rate of the common stream for all users. To solve this challenging high-coupling and non-convexity problem, we adopt a fractional programming (FP)-based alternating optimization (AO) approach, where each sub-problem is addressed via semidefinite relaxation (SDR) and successive convex approximation (SCA) methods. Numerical results demonstrate that the proposed scheme outperforms other multiple access schemes and conventional passive RIS in terms of the achievable sum rate. Additionally, considering the HWI of the transceiver and STAR-RIS makes our algorithm more robust than when such considerations are not included.
GLRD: Global-Local Collaborative Reason and Debate with PSL for 3D Open-Vocabulary Detection
Mar 26, 2025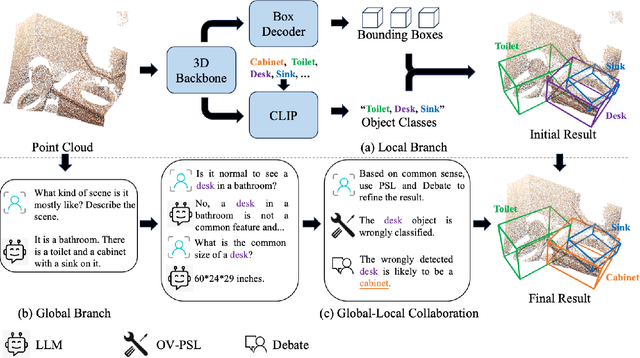
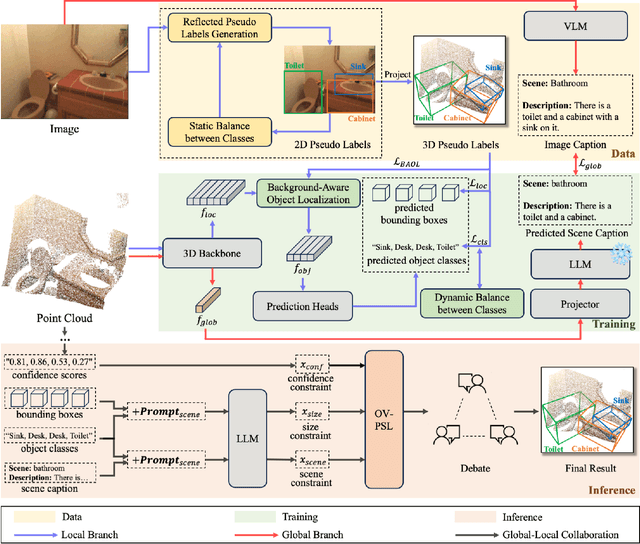
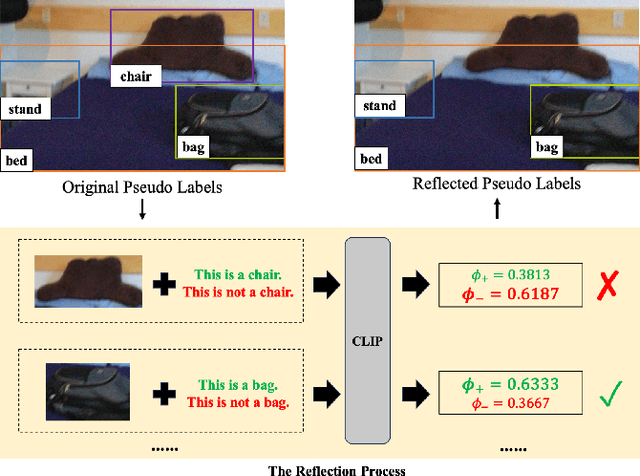
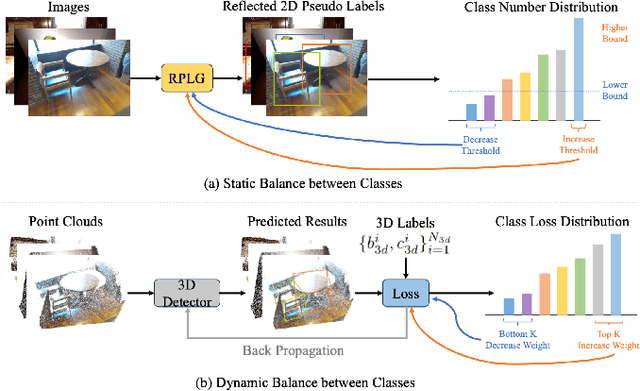
The task of LiDAR-based 3D Open-Vocabulary Detection (3D OVD) requires the detector to learn to detect novel objects from point clouds without off-the-shelf training labels. Previous methods focus on the learning of object-level representations and ignore the scene-level information, thus it is hard to distinguish objects with similar classes. In this work, we propose a Global-Local Collaborative Reason and Debate with PSL (GLRD) framework for the 3D OVD task, considering both local object-level information and global scene-level information. Specifically, LLM is utilized to perform common sense reasoning based on object-level and scene-level information, where the detection result is refined accordingly. To further boost the LLM's ability of precise decisions, we also design a probabilistic soft logic solver (OV-PSL) to search for the optimal solution, and a debate scheme to confirm the class of confusable objects. In addition, to alleviate the uneven distribution of classes, a static balance scheme (SBC) and a dynamic balance scheme (DBC) are designed. In addition, to reduce the influence of noise in data and training, we further propose Reflected Pseudo Labels Generation (RPLG) and Background-Aware Object Localization (BAOL). Extensive experiments conducted on ScanNet and SUN RGB-D demonstrate the superiority of GLRD, where absolute improvements in mean average precision are $+2.82\%$ on SUN RGB-D and $+3.72\%$ on ScanNet in the partial open-vocabulary setting. In the full open-vocabulary setting, the absolute improvements in mean average precision are $+4.03\%$ on ScanNet and $+14.11\%$ on SUN RGB-D.
Rumor Detection on Social Media with Temporal Propagation Structure Optimization
Dec 12, 2024



Traditional methods for detecting rumors on social media primarily focus on analyzing textual content, often struggling to capture the complexity of online interactions. Recent research has shifted towards leveraging graph neural networks to model the hierarchical conversation structure that emerges during rumor propagation. However, these methods tend to overlook the temporal aspect of rumor propagation and may disregard potential noise within the propagation structure. In this paper, we propose a novel approach that incorporates temporal information by constructing a weighted propagation tree, where the weight of each edge represents the time interval between connected posts. Drawing upon the theory of structural entropy, we transform this tree into a coding tree. This transformation aims to preserve the essential structure of rumor propagation while reducing noise. Finally, we introduce a recursive neural network to learn from the coding tree for rumor veracity prediction. Experimental results on two common datasets demonstrate the superiority of our approach.
Integrated Sensing and Communication in IRS-assisted High-Mobility Systems: Design, Analysis and Optimization
Jul 31, 2024In this paper, we investigate integrated sensing and communication (ISAC) in high-mobility systems with the aid of an intelligent reflecting surface (IRS). To exploit the benefits of Delay-Doppler (DD) spread caused by high mobility, orthogonal time frequency space (OTFS)-based frame structure and transmission framework are proposed. {In such a framework,} we first design a low-complexity ratio-based sensing algorithm for estimating the velocity of mobile user. Then, we analyze the performance of sensing and communication in terms of achievable mean square error (MSE) and achievable rate, respectively, and reveal the impact of key parameters. Next, with the derived performance expressions, we jointly optimize the phase shift matrix of IRS and the receive combining vector at the base station (BS) to improve the overall performance of integrated sensing and communication. Finally, extensive simulation results confirm the effectiveness of the proposed algorithms in high-mobility systems.
Global-Local Collaborative Inference with LLM for Lidar-Based Open-Vocabulary Detection
Jul 12, 2024Open-Vocabulary Detection (OVD) is the task of detecting all interesting objects in a given scene without predefined object classes. Extensive work has been done to deal with the OVD for 2D RGB images, but the exploration of 3D OVD is still limited. Intuitively, lidar point clouds provide 3D information, both object level and scene level, to generate trustful detection results. However, previous lidar-based OVD methods only focus on the usage of object-level features, ignoring the essence of scene-level information. In this paper, we propose a Global-Local Collaborative Scheme (GLIS) for the lidar-based OVD task, which contains a local branch to generate object-level detection result and a global branch to obtain scene-level global feature. With the global-local information, a Large Language Model (LLM) is applied for chain-of-thought inference, and the detection result can be refined accordingly. We further propose Reflected Pseudo Labels Generation (RPLG) to generate high-quality pseudo labels for supervision and Background-Aware Object Localization (BAOL) to select precise object proposals. Extensive experiments on ScanNetV2 and SUN RGB-D demonstrate the superiority of our methods. Code is released at https://github.com/GradiusTwinbee/GLIS.
Towards Vehicle-to-everything Autonomous Driving: A Survey on Collaborative Perception
Aug 31, 2023



Vehicle-to-everything (V2X) autonomous driving opens up a promising direction for developing a new generation of intelligent transportation systems. Collaborative perception (CP) as an essential component to achieve V2X can overcome the inherent limitations of individual perception, including occlusion and long-range perception. In this survey, we provide a comprehensive review of CP methods for V2X scenarios, bringing a profound and in-depth understanding to the community. Specifically, we first introduce the architecture and workflow of typical V2X systems, which affords a broader perspective to understand the entire V2X system and the role of CP within it. Then, we thoroughly summarize and analyze existing V2X perception datasets and CP methods. Particularly, we introduce numerous CP methods from various crucial perspectives, including collaboration stages, roadside sensors placement, latency compensation, performance-bandwidth trade-off, attack/defense, pose alignment, etc. Moreover, we conduct extensive experimental analyses to compare and examine current CP methods, revealing some essential and unexplored insights. Specifically, we analyze the performance changes of different methods under different bandwidths, providing a deep insight into the performance-bandwidth trade-off issue. Also, we examine methods under different LiDAR ranges. To study the model robustness, we further investigate the effects of various simulated real-world noises on the performance of different CP methods, covering communication latency, lossy communication, localization errors, and mixed noises. In addition, we look into the sim-to-real generalization ability of existing CP methods. At last, we thoroughly discuss issues and challenges, highlighting promising directions for future efforts. Our codes for experimental analysis will be public at https://github.com/memberRE/Collaborative-Perception.
Detecting Political Opinions in Tweets through Bipartite Graph Analysis: A Skip Aggregation Graph Convolution Approach
Apr 22, 2023



Public opinion is a crucial factor in shaping political decision-making. Nowadays, social media has become an essential platform for individuals to engage in political discussions and express their political views, presenting researchers with an invaluable resource for analyzing public opinion. In this paper, we focus on the 2020 US presidential election and create a large-scale dataset from Twitter. To detect political opinions in tweets, we build a user-tweet bipartite graph based on users' posting and retweeting behaviors and convert the task into a Graph Neural Network (GNN)-based node classification problem. Then, we introduce a novel skip aggregation mechanism that makes tweet nodes aggregate information from second-order neighbors, which are also tweet nodes due to the graph's bipartite nature, effectively leveraging user behavioral information. The experimental results show that our proposed model significantly outperforms several competitive baselines. Further analyses demonstrate the significance of user behavioral information and the effectiveness of skip aggregation.