 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGLRD: Global-Local Collaborative Reason and Debate with PSL for 3D Open-Vocabulary Detection
Mar 26, 2025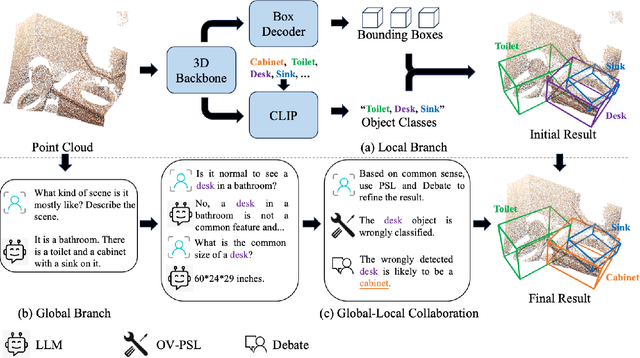
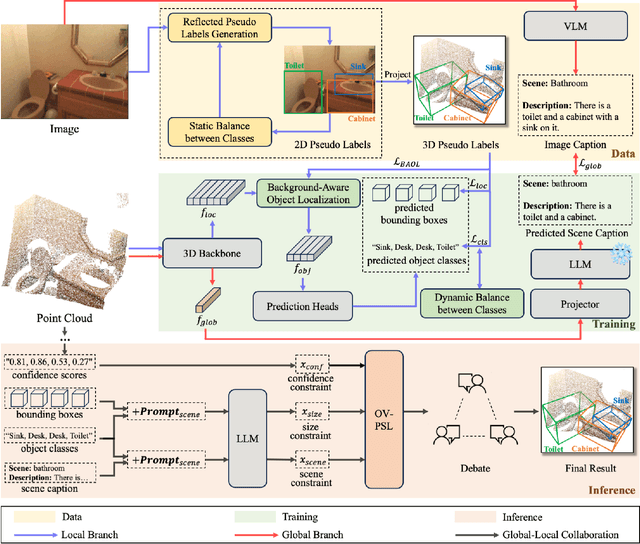
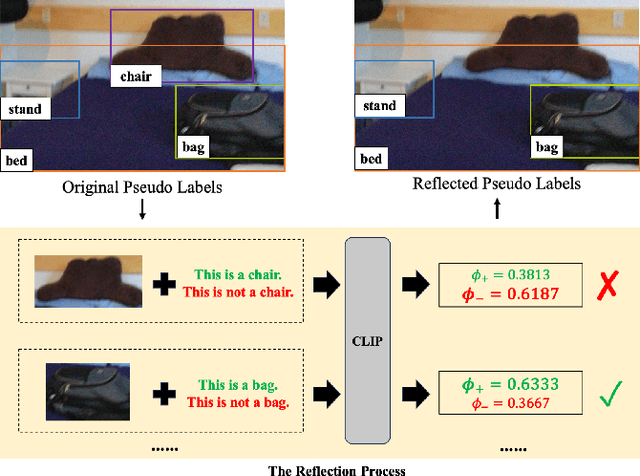
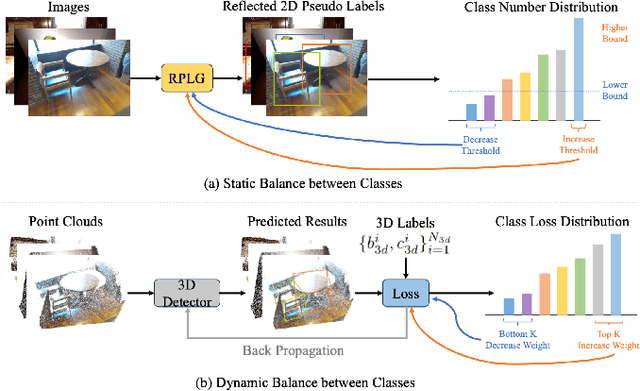
The task of LiDAR-based 3D Open-Vocabulary Detection (3D OVD) requires the detector to learn to detect novel objects from point clouds without off-the-shelf training labels. Previous methods focus on the learning of object-level representations and ignore the scene-level information, thus it is hard to distinguish objects with similar classes. In this work, we propose a Global-Local Collaborative Reason and Debate with PSL (GLRD) framework for the 3D OVD task, considering both local object-level information and global scene-level information. Specifically, LLM is utilized to perform common sense reasoning based on object-level and scene-level information, where the detection result is refined accordingly. To further boost the LLM's ability of precise decisions, we also design a probabilistic soft logic solver (OV-PSL) to search for the optimal solution, and a debate scheme to confirm the class of confusable objects. In addition, to alleviate the uneven distribution of classes, a static balance scheme (SBC) and a dynamic balance scheme (DBC) are designed. In addition, to reduce the influence of noise in data and training, we further propose Reflected Pseudo Labels Generation (RPLG) and Background-Aware Object Localization (BAOL). Extensive experiments conducted on ScanNet and SUN RGB-D demonstrate the superiority of GLRD, where absolute improvements in mean average precision are $+2.82\%$ on SUN RGB-D and $+3.72\%$ on ScanNet in the partial open-vocabulary setting. In the full open-vocabulary setting, the absolute improvements in mean average precision are $+4.03\%$ on ScanNet and $+14.11\%$ on SUN RGB-D.
Global-Local Collaborative Inference with LLM for Lidar-Based Open-Vocabulary Detection
Jul 12, 2024Open-Vocabulary Detection (OVD) is the task of detecting all interesting objects in a given scene without predefined object classes. Extensive work has been done to deal with the OVD for 2D RGB images, but the exploration of 3D OVD is still limited. Intuitively, lidar point clouds provide 3D information, both object level and scene level, to generate trustful detection results. However, previous lidar-based OVD methods only focus on the usage of object-level features, ignoring the essence of scene-level information. In this paper, we propose a Global-Local Collaborative Scheme (GLIS) for the lidar-based OVD task, which contains a local branch to generate object-level detection result and a global branch to obtain scene-level global feature. With the global-local information, a Large Language Model (LLM) is applied for chain-of-thought inference, and the detection result can be refined accordingly. We further propose Reflected Pseudo Labels Generation (RPLG) to generate high-quality pseudo labels for supervision and Background-Aware Object Localization (BAOL) to select precise object proposals. Extensive experiments on ScanNetV2 and SUN RGB-D demonstrate the superiority of our methods. Code is released at https://github.com/GradiusTwinbee/GLIS.
Eliminating Cross-modal Conflicts in BEV Space for LiDAR-Camera 3D Object Detection
Mar 12, 2024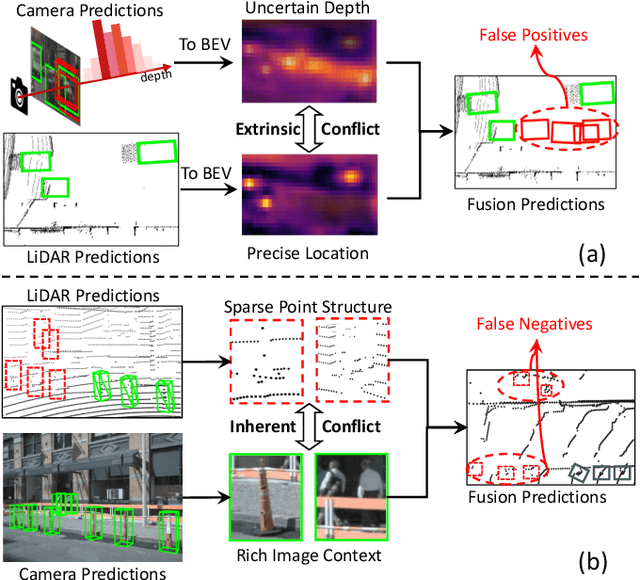
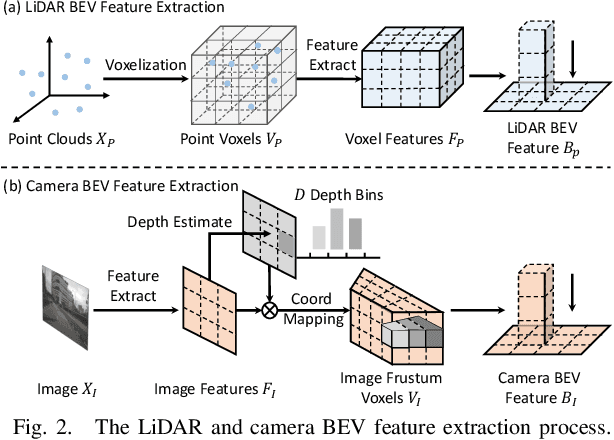
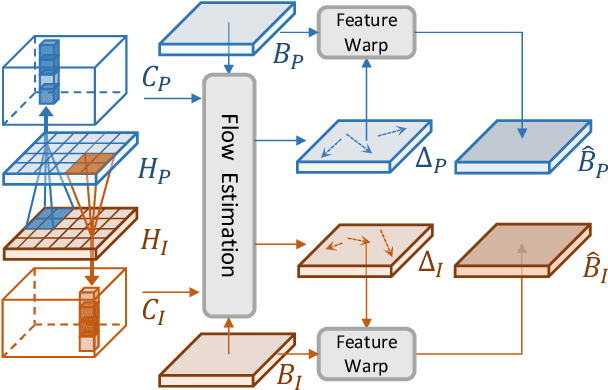
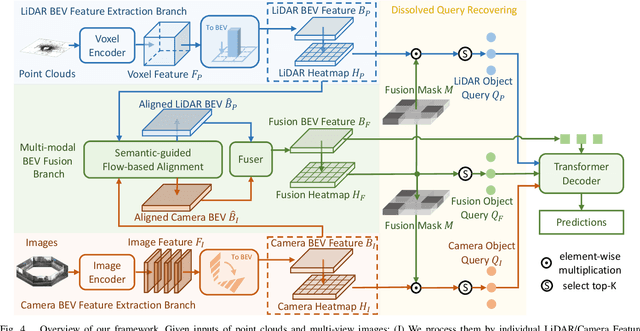
Recent 3D object detectors typically utilize multi-sensor data and unify multi-modal features in the shared bird's-eye view (BEV) representation space. However, our empirical findings indicate that previous methods have limitations in generating fusion BEV features free from cross-modal conflicts. These conflicts encompass extrinsic conflicts caused by BEV feature construction and inherent conflicts stemming from heterogeneous sensor signals. Therefore, we propose a novel Eliminating Conflicts Fusion (ECFusion) method to explicitly eliminate the extrinsic/inherent conflicts in BEV space and produce improved multi-modal BEV features. Specifically, we devise a Semantic-guided Flow-based Alignment (SFA) module to resolve extrinsic conflicts via unifying spatial distribution in BEV space before fusion. Moreover, we design a Dissolved Query Recovering (DQR) mechanism to remedy inherent conflicts by preserving objectness clues that are lost in the fusion BEV feature. In general, our method maximizes the effective information utilization of each modality and leverages inter-modal complementarity. Our method achieves state-of-the-art performance in the highly competitive nuScenes 3D object detection dataset. The code is released at https://github.com/fjhzhixi/ECFusion.
Open-sourced Data Ecosystem in Autonomous Driving: the Present and Future
Dec 06, 2023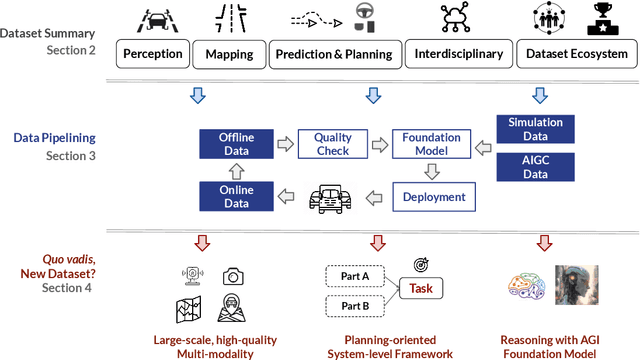
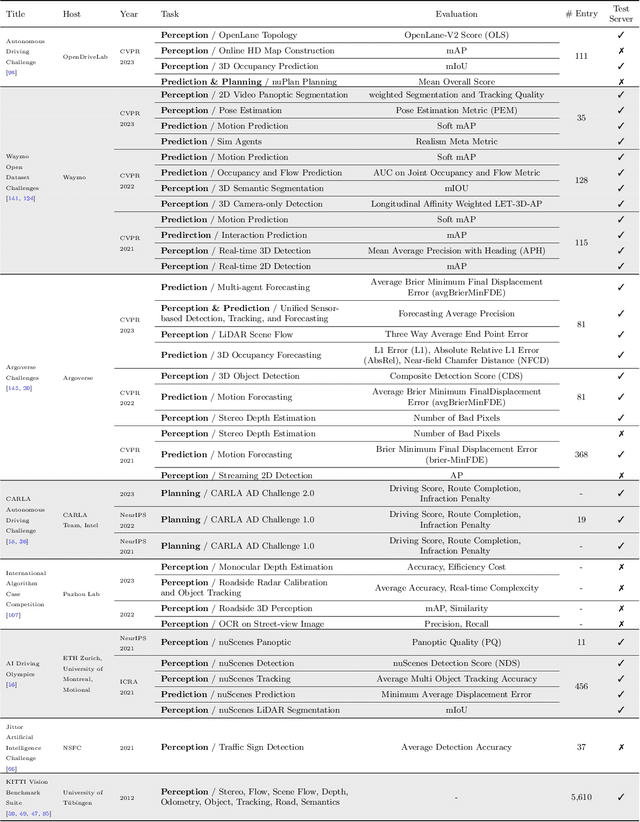
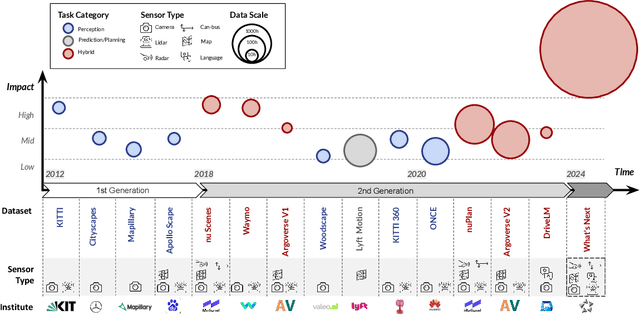
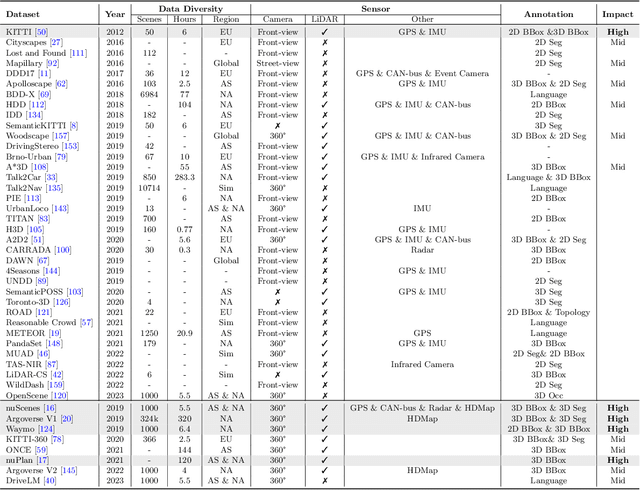
With the continuous maturation and application of autonomous driving technology, a systematic examination of open-source autonomous driving datasets becomes instrumental in fostering the robust evolution of the industry ecosystem. Current autonomous driving datasets can broadly be categorized into two generations. The first-generation autonomous driving datasets are characterized by relatively simpler sensor modalities, smaller data scale, and is limited to perception-level tasks. KITTI, introduced in 2012, serves as a prominent representative of this initial wave. In contrast, the second-generation datasets exhibit heightened complexity in sensor modalities, greater data scale and diversity, and an expansion of tasks from perception to encompass prediction and control. Leading examples of the second generation include nuScenes and Waymo, introduced around 2019. This comprehensive review, conducted in collaboration with esteemed colleagues from both academia and industry, systematically assesses over seventy open-source autonomous driving datasets from domestic and international sources. It offers insights into various aspects, such as the principles underlying the creation of high-quality datasets, the pivotal role of data engine systems, and the utilization of generative foundation models to facilitate scalable data generation. Furthermore, this review undertakes an exhaustive analysis and discourse regarding the characteristics and data scales that future third-generation autonomous driving datasets should possess. It also delves into the scientific and technical challenges that warrant resolution. These endeavors are pivotal in advancing autonomous innovation and fostering technological enhancement in critical domains. For further details, please refer to https://github.com/OpenDriveLab/DriveAGI.
SLAM with Objects using a Nonparametric Pose Graph
Apr 19, 2017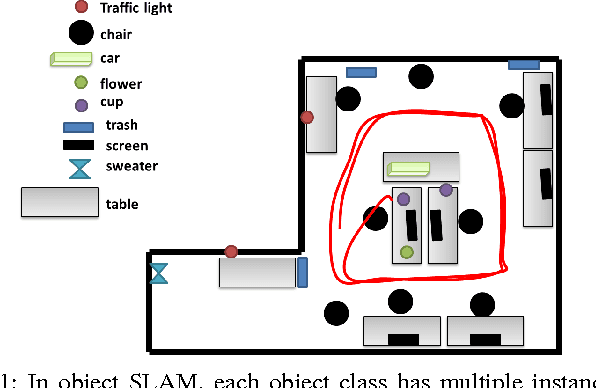
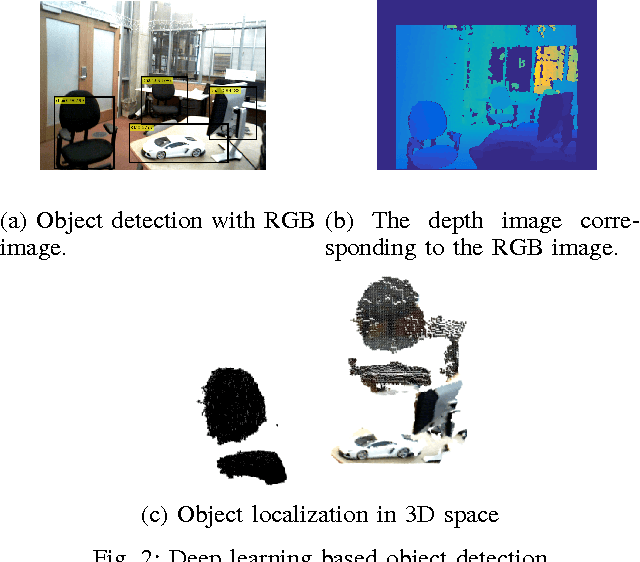
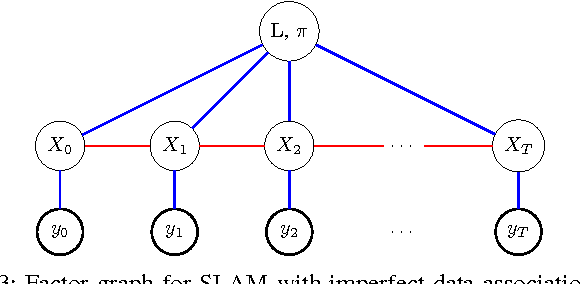
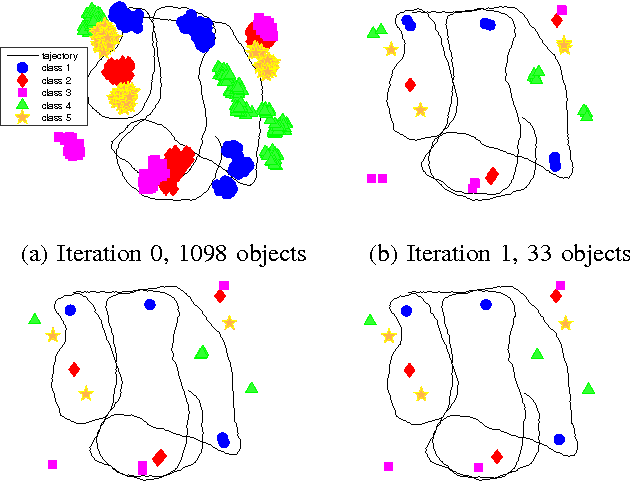
Mapping and self-localization in unknown environments are fundamental capabilities in many robotic applications. These tasks typically involve the identification of objects as unique features or landmarks, which requires the objects both to be detected and then assigned a unique identifier that can be maintained when viewed from different perspectives and in different images. The \textit{data association} and \textit{simultaneous localization and mapping} (SLAM) problems are, individually, well-studied in the literature. But these two problems are inherently tightly coupled, and that has not been well-addressed. Without accurate SLAM, possible data associations are combinatorial and become intractable easily. Without accurate data association, the error of SLAM algorithms diverge easily. This paper proposes a novel nonparametric pose graph that models data association and SLAM in a single framework. An algorithm is further introduced to alternate between inferring data association and performing SLAM. Experimental results show that our approach has the new capability of associating object detections and localizing objects at the same time, leading to significantly better performance on both the data association and SLAM problems than achieved by considering only one and ignoring imperfections in the other.
Information-based Active SLAM via Topological Feature Graphs
Aug 29, 2016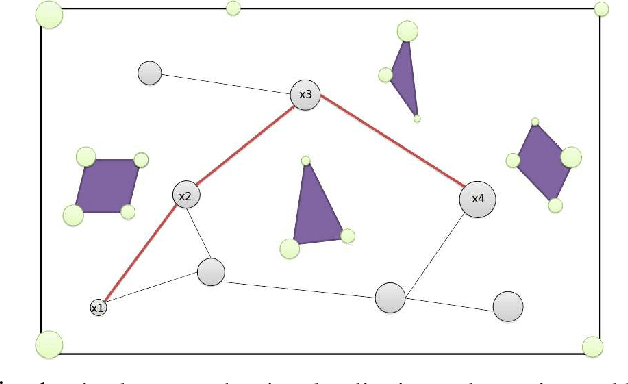
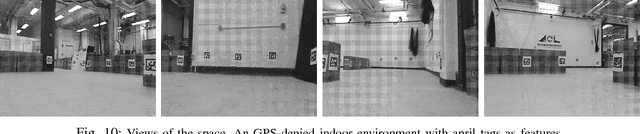
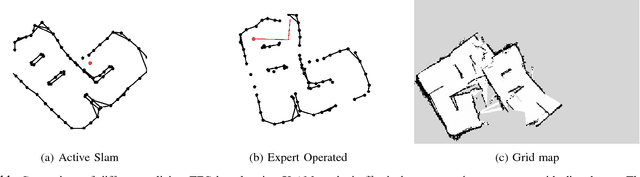
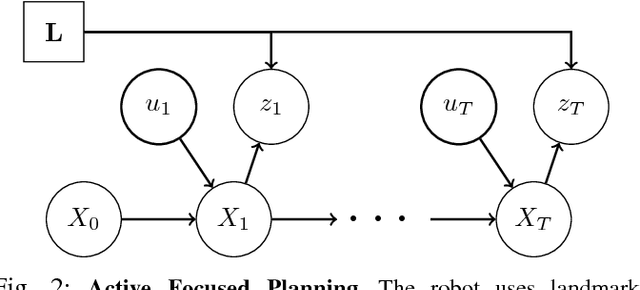
Active SLAM is the task of actively planning robot paths while simultaneously building a map and localizing within. Existing work has focused on planning paths with occupancy grid maps, which do not scale well and suffer from long term drift. This work proposes a Topological Feature Graph (TFG) representation that scales well and develops an active SLAM algorithm with it. The TFG uses graphical models, which utilize independences between variables, and enables a unified quantification of exploration and exploitation gains with a single entropy metric. Hence, it facilitates a natural and principled balance between map exploration and refinement. A probabilistic roadmap path-planner is used to generate robot paths in real time. Experimental results demonstrate that the proposed approach achieves better accuracy than a standard grid-map based approach while requiring orders of magnitude less computation and memory resources.