 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInformation-based Active SLAM via Topological Feature Graphs
Paper and Code
Aug 29, 2016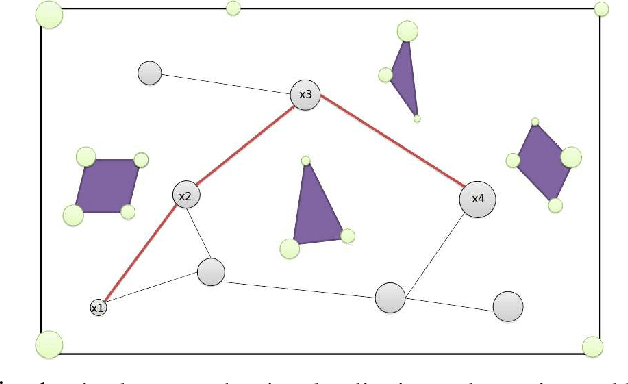
Active SLAM is the task of actively planning robot paths while simultaneously building a map and localizing within. Existing work has focused on planning paths with occupancy grid maps, which do not scale well and suffer from long term drift. This work proposes a Topological Feature Graph (TFG) representation that scales well and develops an active SLAM algorithm with it. The TFG uses graphical models, which utilize independences between variables, and enables a unified quantification of exploration and exploitation gains with a single entropy metric. Hence, it facilitates a natural and principled balance between map exploration and refinement. A probabilistic roadmap path-planner is used to generate robot paths in real time. Experimental results demonstrate that the proposed approach achieves better accuracy than a standard grid-map based approach while requiring orders of magnitude less computation and memory resources.