 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSLAM with Objects using a Nonparametric Pose Graph
Paper and Code
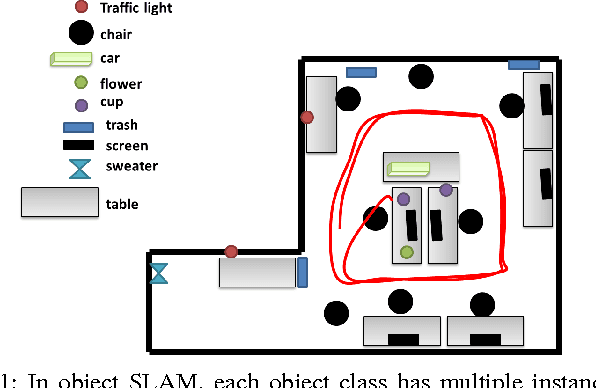
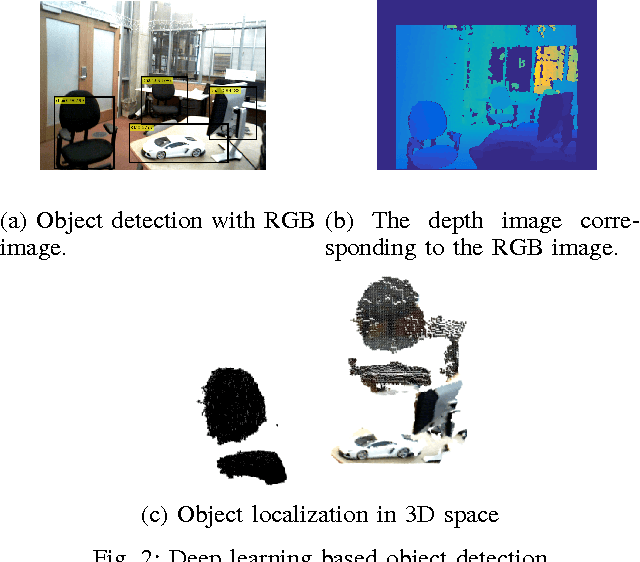
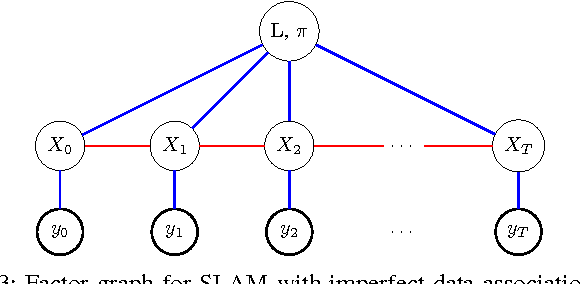
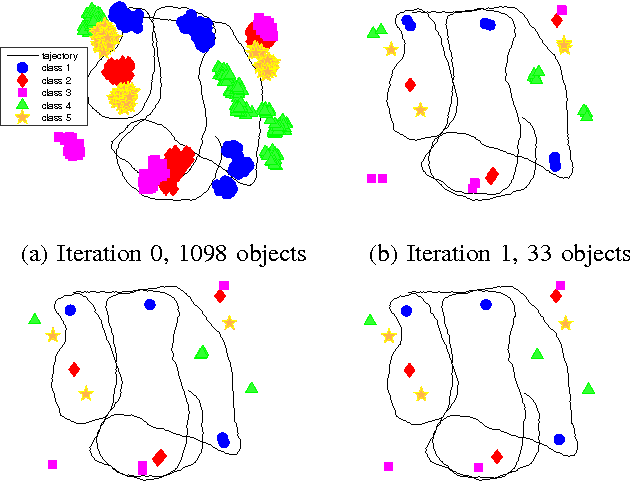
Mapping and self-localization in unknown environments are fundamental capabilities in many robotic applications. These tasks typically involve the identification of objects as unique features or landmarks, which requires the objects both to be detected and then assigned a unique identifier that can be maintained when viewed from different perspectives and in different images. The \textit{data association} and \textit{simultaneous localization and mapping} (SLAM) problems are, individually, well-studied in the literature. But these two problems are inherently tightly coupled, and that has not been well-addressed. Without accurate SLAM, possible data associations are combinatorial and become intractable easily. Without accurate data association, the error of SLAM algorithms diverge easily. This paper proposes a novel nonparametric pose graph that models data association and SLAM in a single framework. An algorithm is further introduced to alternate between inferring data association and performing SLAM. Experimental results show that our approach has the new capability of associating object detections and localizing objects at the same time, leading to significantly better performance on both the data association and SLAM problems than achieved by considering only one and ignoring imperfections in the other.