 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeT5Gemma 2: Seeing, Reading, and Understanding Longer
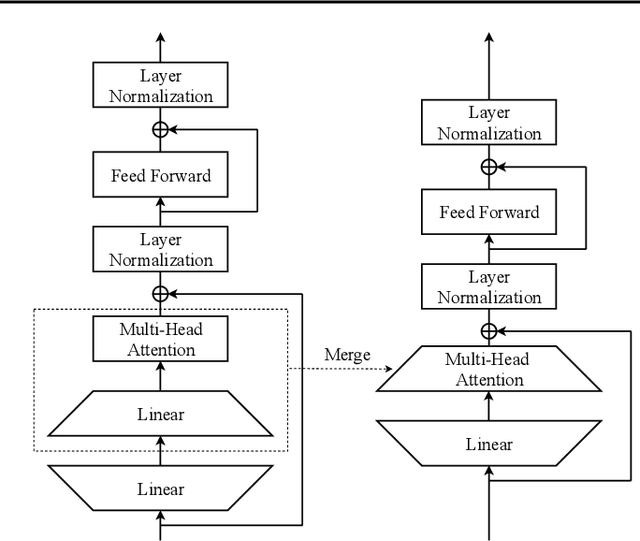
Dec 23, 2025We introduce T5Gemma 2, the next generation of the T5Gemma family of lightweight open encoder-decoder models, featuring strong multilingual, multimodal and long-context capabilities. T5Gemma 2 follows the adaptation recipe (via UL2) in T5Gemma -- adapting a pretrained decoder-only model into an encoder-decoder model, and extends it from text-only regime to multimodal based on the Gemma 3 models. We further propose two methods to improve the efficiency: tied word embedding that shares all embeddings across encoder and decoder, and merged attention that unifies decoder self- and cross-attention into a single joint module. Experiments demonstrate the generality of the adaptation strategy over architectures and modalities as well as the unique strength of the encoder-decoder architecture on long context modeling. Similar to T5Gemma, T5Gemma 2 yields comparable or better pretraining performance and significantly improved post-training performance than its Gemma 3 counterpart. We release the pretrained models (270M-270M, 1B-1B and 4B-4B) to the community for future research.
Token Dropping for Efficient BERT Pretraining
Mar 24, 2022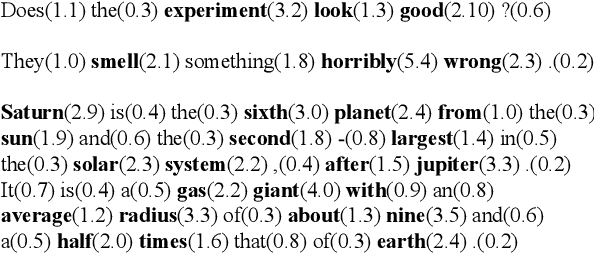
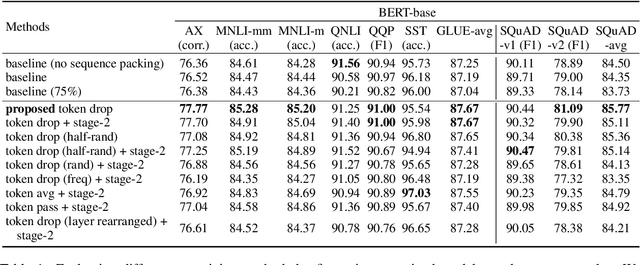
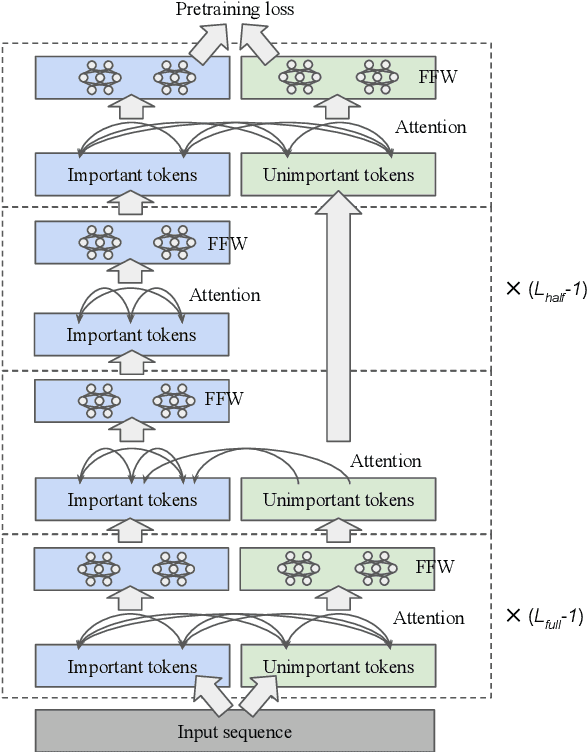
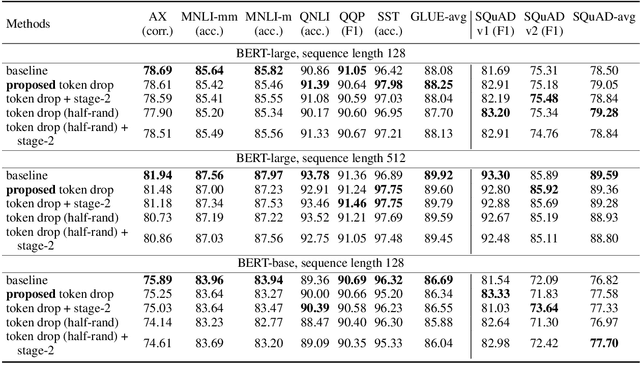
Transformer-based models generally allocate the same amount of computation for each token in a given sequence. We develop a simple but effective "token dropping" method to accelerate the pretraining of transformer models, such as BERT, without degrading its performance on downstream tasks. In short, we drop unimportant tokens starting from an intermediate layer in the model to make the model focus on important tokens; the dropped tokens are later picked up by the last layer of the model so that the model still produces full-length sequences. We leverage the already built-in masked language modeling (MLM) loss to identify unimportant tokens with practically no computational overhead. In our experiments, this simple approach reduces the pretraining cost of BERT by 25% while achieving similar overall fine-tuning performance on standard downstream tasks.
Auto-scaling Vision Transformers without Training
Feb 27, 2022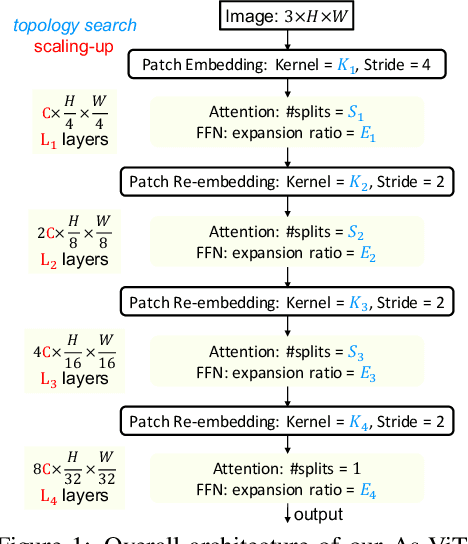
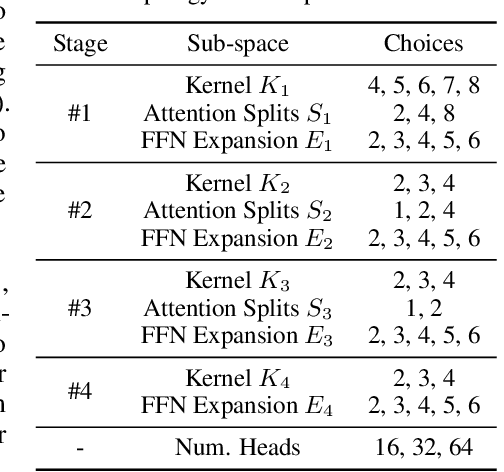
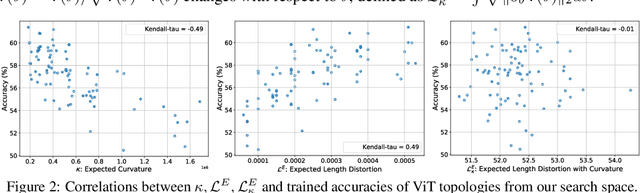
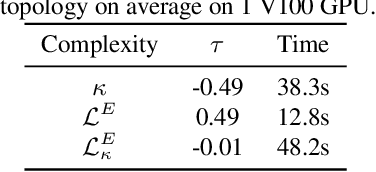
This work targets automated designing and scaling of Vision Transformers (ViTs). The motivation comes from two pain spots: 1) the lack of efficient and principled methods for designing and scaling ViTs; 2) the tremendous computational cost of training ViT that is much heavier than its convolution counterpart. To tackle these issues, we propose As-ViT, an auto-scaling framework for ViTs without training, which automatically discovers and scales up ViTs in an efficient and principled manner. Specifically, we first design a "seed" ViT topology by leveraging a training-free search process. This extremely fast search is fulfilled by a comprehensive study of ViT's network complexity, yielding a strong Kendall-tau correlation with ground-truth accuracies. Second, starting from the "seed" topology, we automate the scaling rule for ViTs by growing widths/depths to different ViT layers. This results in a series of architectures with different numbers of parameters in a single run. Finally, based on the observation that ViTs can tolerate coarse tokenization in early training stages, we propose a progressive tokenization strategy to train ViTs faster and cheaper. As a unified framework, As-ViT achieves strong performance on classification (83.5% top1 on ImageNet-1k) and detection (52.7% mAP on COCO) without any manual crafting nor scaling of ViT architectures: the end-to-end model design and scaling process cost only 12 hours on one V100 GPU. Our code is available at https://github.com/VITA-Group/AsViT.
A Simple Single-Scale Vision Transformer for Object Localization and Instance Segmentation
Dec 17, 2021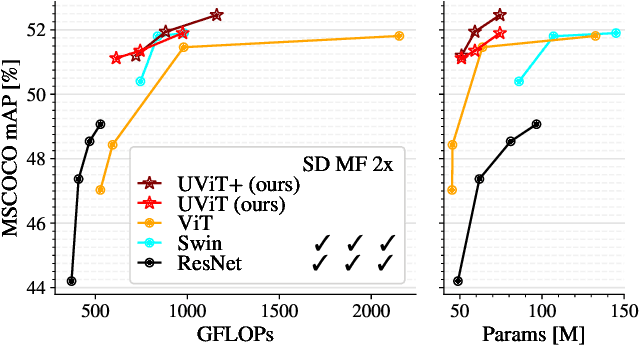
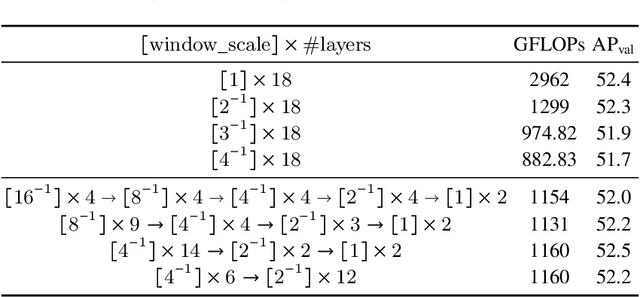
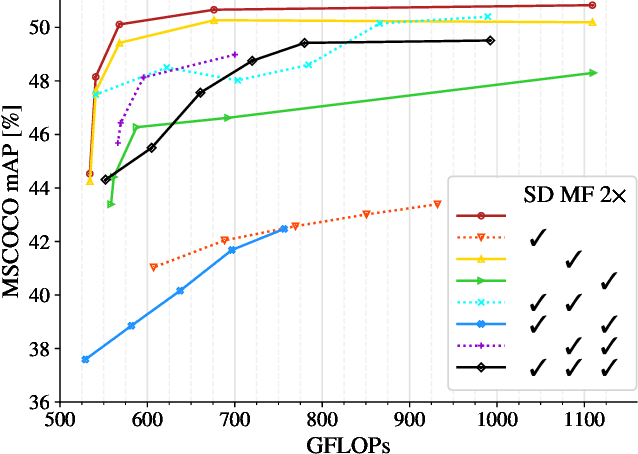
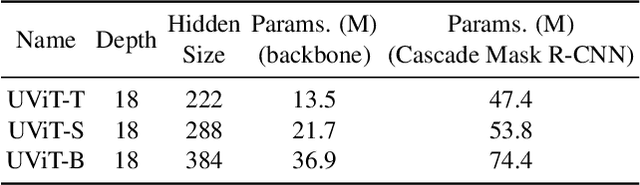
This work presents a simple vision transformer design as a strong baseline for object localization and instance segmentation tasks. Transformers recently demonstrate competitive performance in image classification tasks. To adopt ViT to object detection and dense prediction tasks, many works inherit the multistage design from convolutional networks and highly customized ViT architectures. Behind this design, the goal is to pursue a better trade-off between computational cost and effective aggregation of multiscale global contexts. However, existing works adopt the multistage architectural design as a black-box solution without a clear understanding of its true benefits. In this paper, we comprehensively study three architecture design choices on ViT -- spatial reduction, doubled channels, and multiscale features -- and demonstrate that a vanilla ViT architecture can fulfill this goal without handcrafting multiscale features, maintaining the original ViT design philosophy. We further complete a scaling rule to optimize our model's trade-off on accuracy and computation cost / model size. By leveraging a constant feature resolution and hidden size throughout the encoder blocks, we propose a simple and compact ViT architecture called Universal Vision Transformer (UViT) that achieves strong performance on COCO object detection and instance segmentation tasks.
Speeding up Deep Model Training by Sharing Weights and Then Unsharing
Oct 08, 2021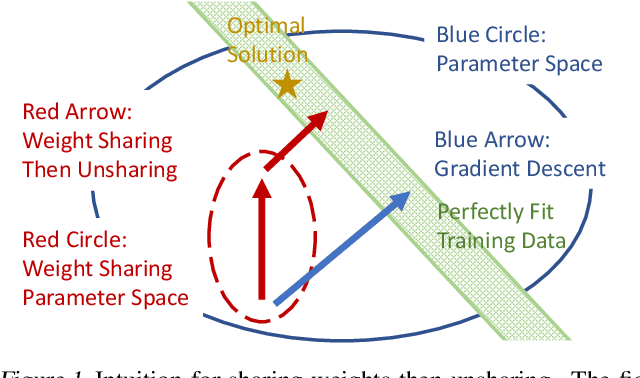
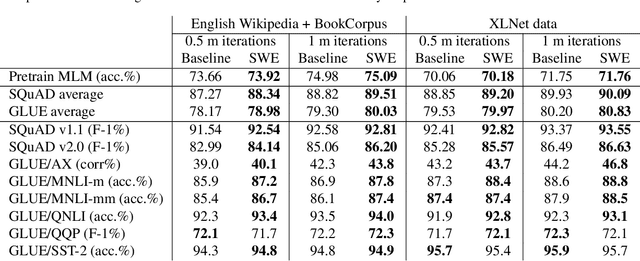
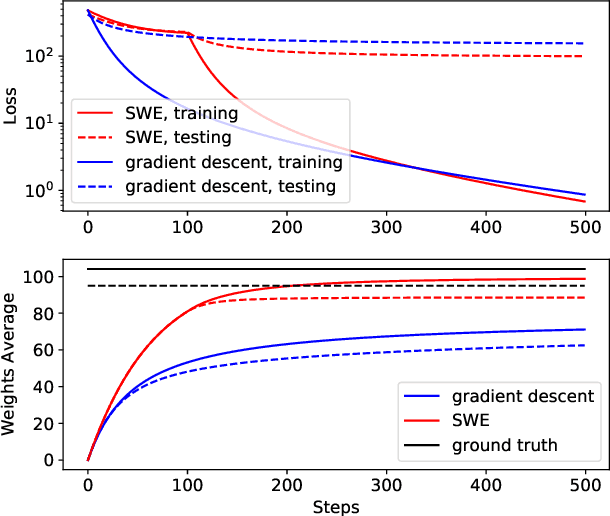
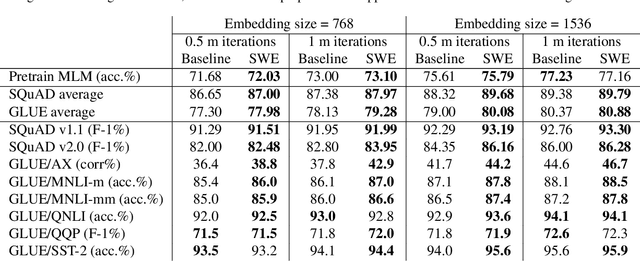
We propose a simple and efficient approach for training the BERT model. Our approach exploits the special structure of BERT that contains a stack of repeated modules (i.e., transformer encoders). Our proposed approach first trains BERT with the weights shared across all the repeated modules till some point. This is for learning the commonly shared component of weights across all repeated layers. We then stop weight sharing and continue training until convergence. We present theoretic insights for training by sharing weights then unsharing with analysis for simplified models. Empirical experiments on the BERT model show that our method yields better performance of trained models, and significantly reduces the number of training iterations.
Efficient Scale-Permuted Backbone with Learned Resource Distribution
Oct 22, 2020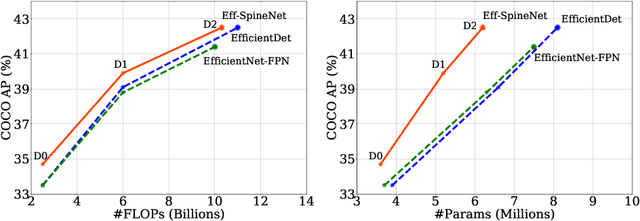
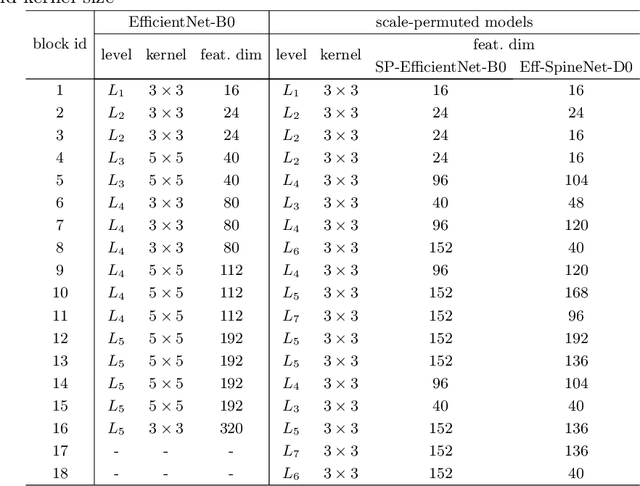
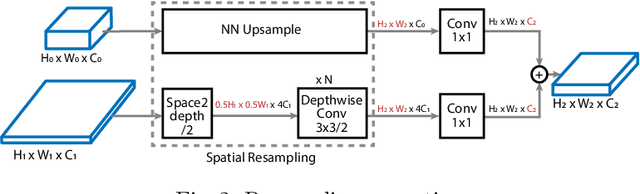
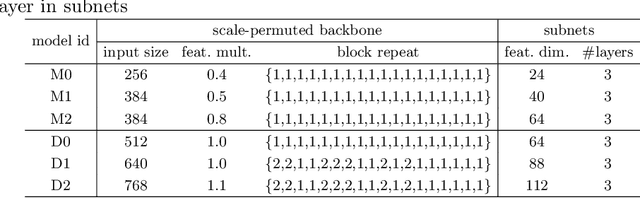
Recently, SpineNet has demonstrated promising results on object detection and image classification over ResNet model. However, it is unclear if the improvement adds up when combining scale-permuted backbone with advanced efficient operations and compound scaling. Furthermore, SpineNet is built with a uniform resource distribution over operations. While this strategy seems to be prevalent for scale-decreased models, it may not be an optimal design for scale-permuted models. In this work, we propose a simple technique to combine efficient operations and compound scaling with a previously learned scale-permuted architecture. We demonstrate the efficiency of scale-permuted model can be further improved by learning a resource distribution over the entire network. The resulting efficient scale-permuted models outperform state-of-the-art EfficientNet-based models on object detection and achieve competitive performance on image classification and semantic segmentation. Code and models will be open-sourced soon.
Go Wide, Then Narrow: Efficient Training of Deep Thin Networks
Jul 01, 2020
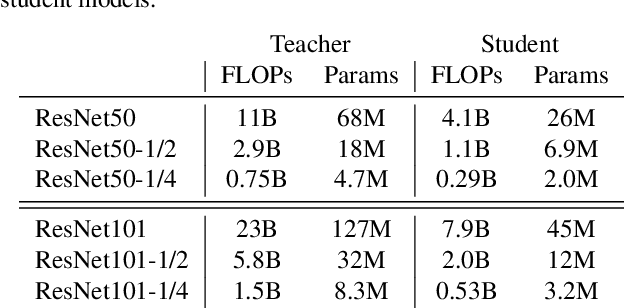
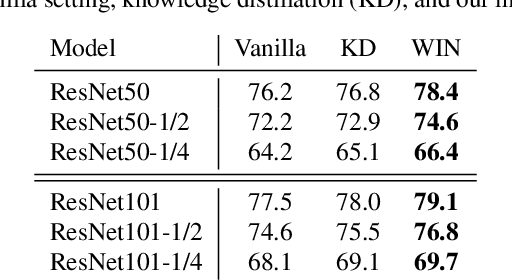
For deploying a deep learning model into production, it needs to be both accurate and compact to meet the latency and memory constraints. This usually results in a network that is deep (to ensure performance) and yet thin (to improve computational efficiency). In this paper, we propose an efficient method to train a deep thin network with a theoretic guarantee. Our method is motivated by model compression. It consists of three stages. In the first stage, we sufficiently widen the deep thin network and train it until convergence. In the second stage, we use this well-trained deep wide network to warm up (or initialize) the original deep thin network. This is achieved by letting the thin network imitate the immediate outputs of the wide network from layer to layer. In the last stage, we further fine tune this well initialized deep thin network. The theoretical guarantee is established by using mean field analysis, which shows the advantage of layerwise imitation over traditional training deep thin networks from scratch by backpropagation. We also conduct large-scale empirical experiments to validate our approach. By training with our method, ResNet50 can outperform ResNet101, and BERT_BASE can be comparable with BERT_LARGE, where both the latter models are trained via the standard training procedures as in the literature.
MobileBERT: a Compact Task-Agnostic BERT for Resource-Limited Devices
Apr 14, 2020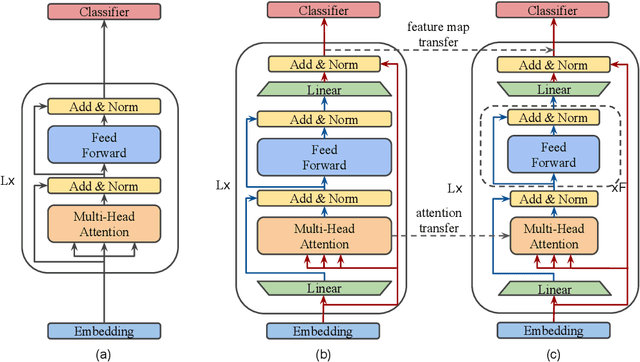
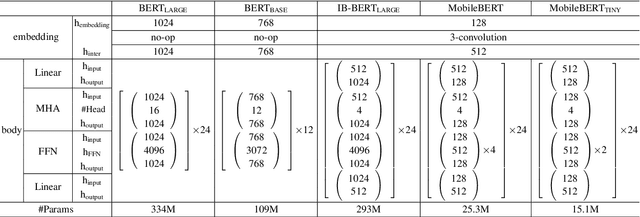
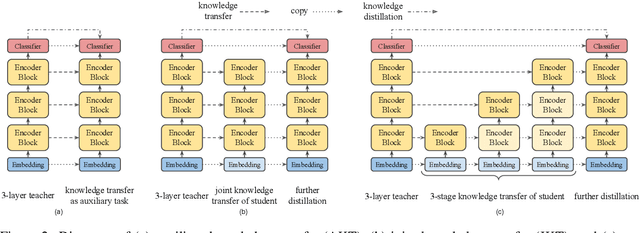
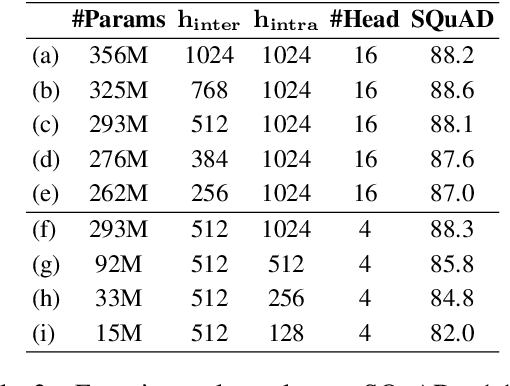
Natural Language Processing (NLP) has recently achieved great success by using huge pre-trained models with hundreds of millions of parameters. However, these models suffer from heavy model sizes and high latency such that they cannot be deployed to resource-limited mobile devices. In this paper, we propose MobileBERT for compressing and accelerating the popular BERT model. Like the original BERT, MobileBERT is task-agnostic, that is, it can be generically applied to various downstream NLP tasks via simple fine-tuning. Basically, MobileBERT is a thin version of BERT_LARGE, while equipped with bottleneck structures and a carefully designed balance between self-attentions and feed-forward networks. To train MobileBERT, we first train a specially designed teacher model, an inverted-bottleneck incorporated BERT_LARGE model. Then, we conduct knowledge transfer from this teacher to MobileBERT. Empirical studies show that MobileBERT is 4.3x smaller and 5.5x faster than BERT_BASE while achieving competitive results on well-known benchmarks. On the natural language inference tasks of GLUE, MobileBERT achieves a GLUEscore o 77.7 (0.6 lower than BERT_BASE), and 62 ms latency on a Pixel 4 phone. On the SQuAD v1.1/v2.0 question answering task, MobileBERT achieves a dev F1 score of 90.0/79.2 (1.5/2.1 higher than BERT_BASE).
BigNAS: Scaling Up Neural Architecture Search with Big Single-Stage Models
Mar 24, 2020
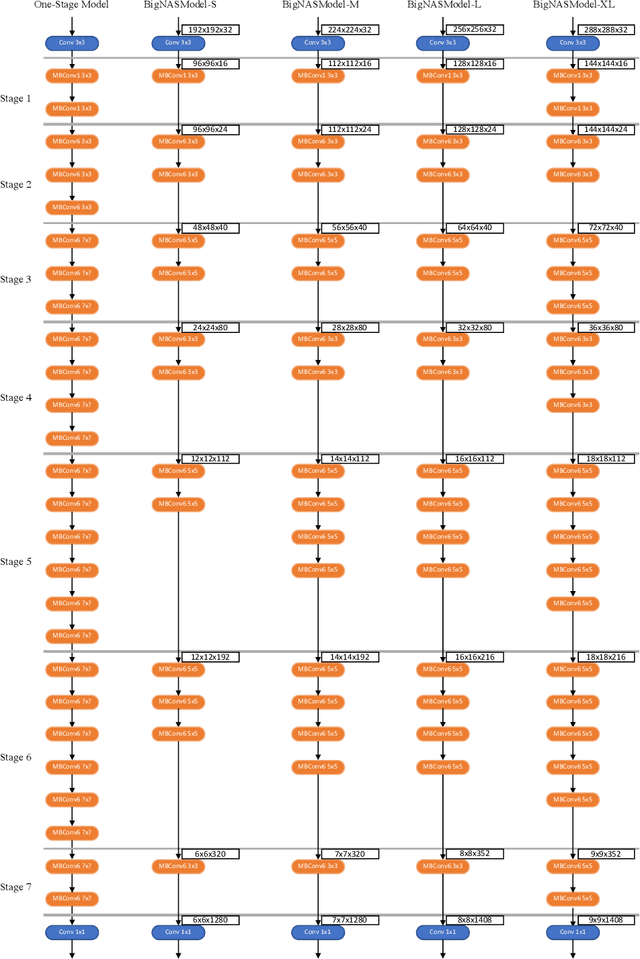
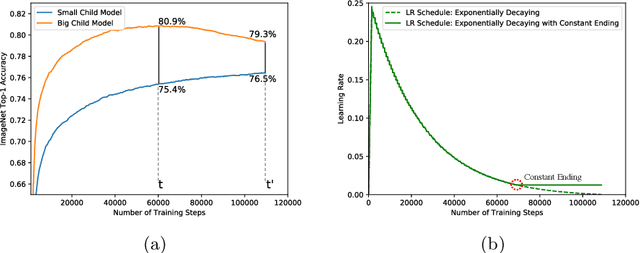
Neural architecture search (NAS) has shown promising results discovering models that are both accurate and fast. For NAS, training a one-shot model has become a popular strategy to rank the relative quality of different architectures (child models) using a single set of shared weights. However, while one-shot model weights can effectively rank different network architectures, the absolute accuracies from these shared weights are typically far below those obtained from stand-alone training. To compensate, existing methods assume that the weights must be retrained, finetuned, or otherwise post-processed after the search is completed. These steps significantly increase the compute requirements and complexity of the architecture search and model deployment. In this work, we propose BigNAS, an approach that challenges the conventional wisdom that post-processing of the weights is necessary to get good prediction accuracies. Without extra retraining or post-processing steps, we are able to train a single set of shared weights on ImageNet and use these weights to obtain child models whose sizes range from 200 to 1000 MFLOPs. Our discovered model family, BigNASModels, achieve top-1 accuracies ranging from 76.5% to 80.9%, surpassing state-of-the-art models in this range including EfficientNets and Once-for-All networks without extra retraining or post-processing. We present ablative study and analysis to further understand the proposed BigNASModels.
SpineNet: Learning Scale-Permuted Backbone for Recognition and Localization
Dec 10, 2019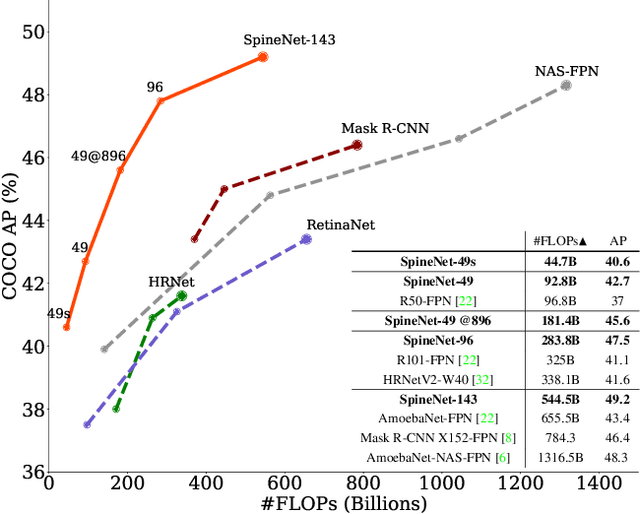
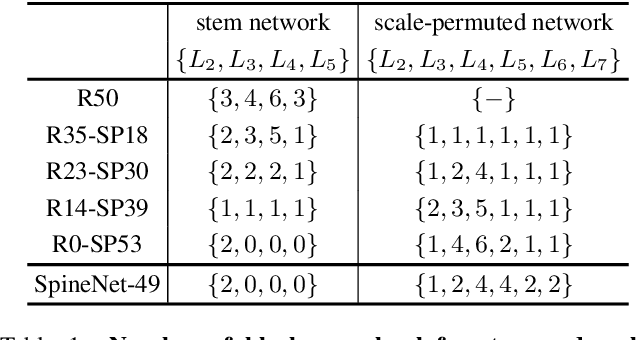
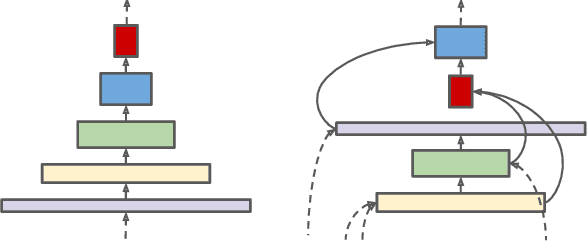
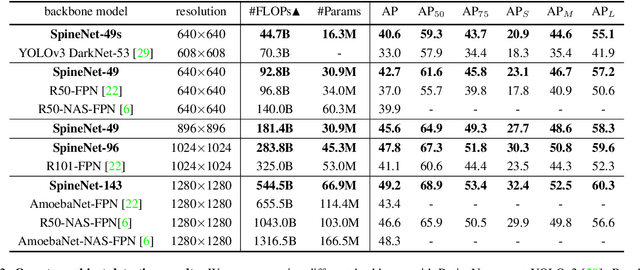
Convolutional neural networks typically encode an input image into a series of intermediate features with decreasing resolutions. While this structure is suited to classification tasks, it does not perform well for tasks requiring simultaneous recognition and localization (e.g., object detection). The encoder-decoder architectures are proposed to resolve this by applying a decoder network onto a backbone model designed for classification tasks. In this paper, we argue that encoder-decoder architecture is ineffective in generating strong multi-scale features because of the scale-decreased backbone. We propose SpineNet, a backbone with scale-permuted intermediate features and cross-scale connections that is learned on an object detection task by Neural Architecture Search. SpineNet achieves state-of-the-art performance of one-stage object detector on COCO with 60% less computation, and outperforms ResNet-FPN counterparts by 6% AP. SpineNet architecture can transfer to classification tasks, achieving 6% top-1 accuracy improvement on a challenging iNaturalist fine-grained dataset.