 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePersonalizing Causal Audio-Driven Facial Motion via Dynamic Multi-modal Retrieval
Apr 26, 2026Audio-driven facial animation is essential for immersive digital interaction, yet existing frameworks fail to reconcile real-time streaming with high-fidelity personalization. Current methods often rely on latency-inducing audio look-ahead, or require high user compliance to pre-encode static embeddings that fails to capture dynamic idiosyncrasies. We present an end-to-end causal framework for personalizing causal facial motion generation via dynamic multi-modal style retrieval, enabling ultra-low latency while uniquely leveraging unstructured style references. We introduce two key innovations: (1) a temporal hierarchical motion representation that captures global temporal context and high-frequency details while maintaining decoding causality, and (2) a multi-modal style retriever that jointly queries audio and motion to dynamically extract stylistic priors without breaking causality. This mechanism allows for scalable personalization with total flexibility regarding the number and contents of templates. By integrating these components into a causal autoregressive architecture, our method significantly outperforms state-of-the-art approaches in lip-sync accuracy, identity consistency, and perceived realism, supported by extensive quantitative evaluations and user studies.
REWIND: Real-Time Egocentric Whole-Body Motion Diffusion with Exemplar-Based Identity Conditioning
Apr 08, 2025We present REWIND (Real-Time Egocentric Whole-Body Motion Diffusion), a one-step diffusion model for real-time, high-fidelity human motion estimation from egocentric image inputs. While an existing method for egocentric whole-body (i.e., body and hands) motion estimation is non-real-time and acausal due to diffusion-based iterative motion refinement to capture correlations between body and hand poses, REWIND operates in a fully causal and real-time manner. To enable real-time inference, we introduce (1) cascaded body-hand denoising diffusion, which effectively models the correlation between egocentric body and hand motions in a fast, feed-forward manner, and (2) diffusion distillation, which enables high-quality motion estimation with a single denoising step. Our denoising diffusion model is based on a modified Transformer architecture, designed to causally model output motions while enhancing generalizability to unseen motion lengths. Additionally, REWIND optionally supports identity-conditioned motion estimation when identity prior is available. To this end, we propose a novel identity conditioning method based on a small set of pose exemplars of the target identity, which further enhances motion estimation quality. Through extensive experiments, we demonstrate that REWIND significantly outperforms the existing baselines both with and without exemplar-based identity conditioning.
Universal Facial Encoding of Codec Avatars from VR Headsets
Jul 17, 2024



Faithful real-time facial animation is essential for avatar-mediated telepresence in Virtual Reality (VR). To emulate authentic communication, avatar animation needs to be efficient and accurate: able to capture both extreme and subtle expressions within a few milliseconds to sustain the rhythm of natural conversations. The oblique and incomplete views of the face, variability in the donning of headsets, and illumination variation due to the environment are some of the unique challenges in generalization to unseen faces. In this paper, we present a method that can animate a photorealistic avatar in realtime from head-mounted cameras (HMCs) on a consumer VR headset. We present a self-supervised learning approach, based on a cross-view reconstruction objective, that enables generalization to unseen users. We present a lightweight expression calibration mechanism that increases accuracy with minimal additional cost to run-time efficiency. We present an improved parameterization for precise ground-truth generation that provides robustness to environmental variation. The resulting system produces accurate facial animation for unseen users wearing VR headsets in realtime. We compare our approach to prior face-encoding methods demonstrating significant improvements in both quantitative metrics and qualitative results.
* SIGGRAPH 2024 (ACM Transactions on Graphics (TOG))
Fast Registration of Photorealistic Avatars for VR Facial Animation
Jan 19, 2024



Virtual Reality (VR) bares promise of social interactions that can feel more immersive than other media. Key to this is the ability to accurately animate a photorealistic avatar of one's likeness while wearing a VR headset. Although high quality registration of person-specific avatars to headset-mounted camera (HMC) images is possible in an offline setting, the performance of generic realtime models are significantly degraded. Online registration is also challenging due to oblique camera views and differences in modality. In this work, we first show that the domain gap between the avatar and headset-camera images is one of the primary sources of difficulty, where a transformer-based architecture achieves high accuracy on domain-consistent data, but degrades when the domain-gap is re-introduced. Building on this finding, we develop a system design that decouples the problem into two parts: 1) an iterative refinement module that takes in-domain inputs, and 2) a generic avatar-guided image-to-image style transfer module that is conditioned on current estimation of expression and head pose. These two modules reinforce each other, as image style transfer becomes easier when close-to-ground-truth examples are shown, and better domain-gap removal helps registration. Our system produces high-quality results efficiently, obviating the need for costly offline registration to generate personalized labels. We validate the accuracy and efficiency of our approach through extensive experiments on a commodity headset, demonstrating significant improvements over direct regression methods as well as offline registration.
Drivable Volumetric Avatars using Texel-Aligned Features
Jul 20, 2022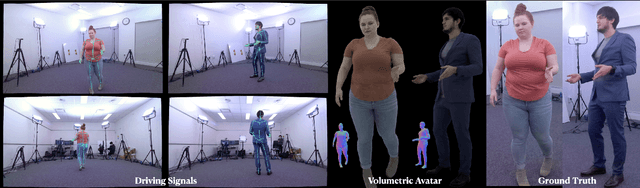
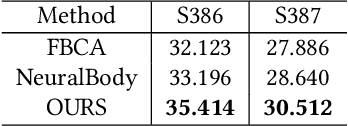
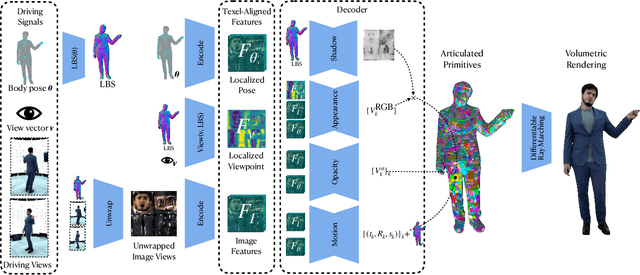
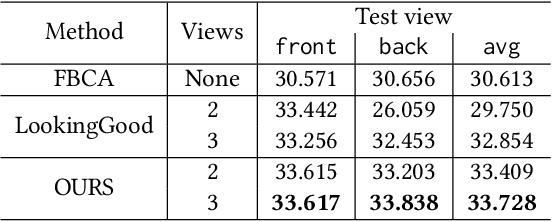
Photorealistic telepresence requires both high-fidelity body modeling and faithful driving to enable dynamically synthesized appearance that is indistinguishable from reality. In this work, we propose an end-to-end framework that addresses two core challenges in modeling and driving full-body avatars of real people. One challenge is driving an avatar while staying faithful to details and dynamics that cannot be captured by a global low-dimensional parameterization such as body pose. Our approach supports driving of clothed avatars with wrinkles and motion that a real driving performer exhibits beyond the training corpus. Unlike existing global state representations or non-parametric screen-space approaches, we introduce texel-aligned features -- a localised representation which can leverage both the structural prior of a skeleton-based parametric model and observed sparse image signals at the same time. Another challenge is modeling a temporally coherent clothed avatar, which typically requires precise surface tracking. To circumvent this, we propose a novel volumetric avatar representation by extending mixtures of volumetric primitives to articulated objects. By explicitly incorporating articulation, our approach naturally generalizes to unseen poses. We also introduce a localized viewpoint conditioning, which leads to a large improvement in generalization of view-dependent appearance. The proposed volumetric representation does not require high-quality mesh tracking as a prerequisite and brings significant quality improvements compared to mesh-based counterparts. In our experiments, we carefully examine our design choices and demonstrate the efficacy of our approach, outperforming the state-of-the-art methods on challenging driving scenarios.
LiP-Flow: Learning Inference-time Priors for Codec Avatars via Normalizing Flows in Latent Space
Mar 15, 2022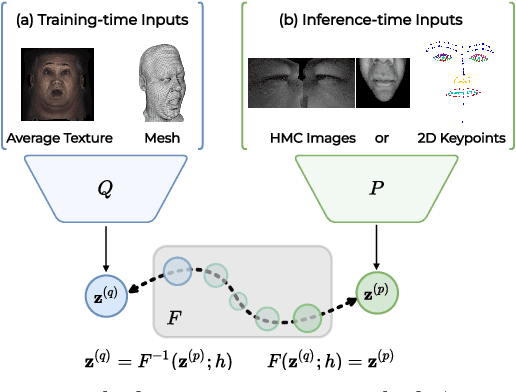
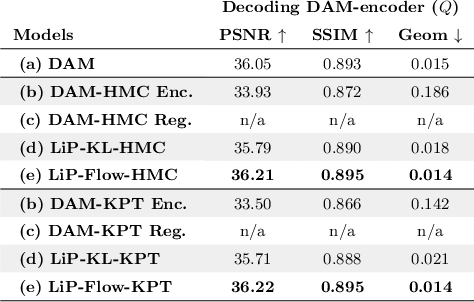
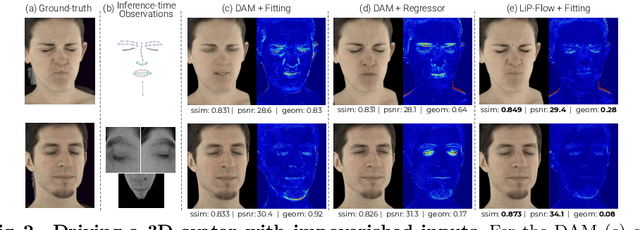
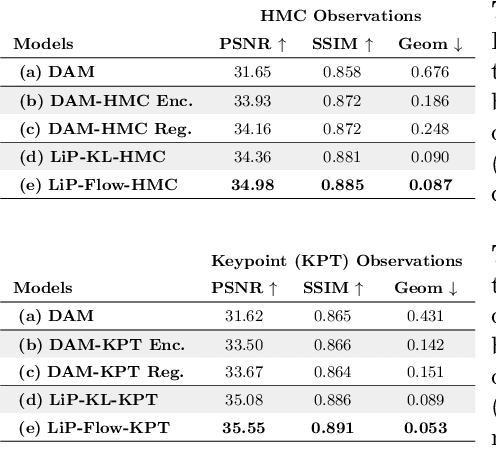
Neural face avatars that are trained from multi-view data captured in camera domes can produce photo-realistic 3D reconstructions. However, at inference time, they must be driven by limited inputs such as partial views recorded by headset-mounted cameras or a front-facing camera, and sparse facial landmarks. To mitigate this asymmetry, we introduce a prior model that is conditioned on the runtime inputs and tie this prior space to the 3D face model via a normalizing flow in the latent space. Our proposed model, LiP-Flow, consists of two encoders that learn representations from the rich training-time and impoverished inference-time observations. A normalizing flow bridges the two representation spaces and transforms latent samples from one domain to another, allowing us to define a latent likelihood objective. We trained our model end-to-end to maximize the similarity of both representation spaces and the reconstruction quality, making the 3D face model aware of the limited driving signals. We conduct extensive evaluations where the latent codes are optimized to reconstruct 3D avatars from partial or sparse observations. We show that our approach leads to an expressive and effective prior, capturing facial dynamics and subtle expressions better.
Driving-Signal Aware Full-Body Avatars
May 21, 2021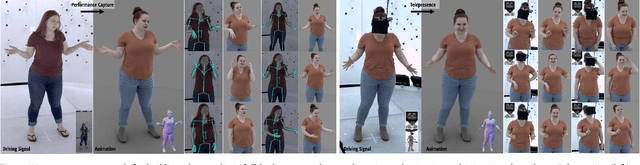
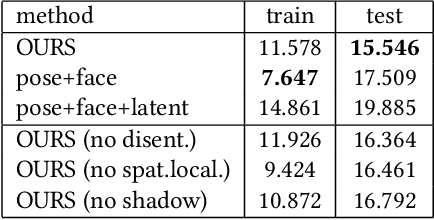
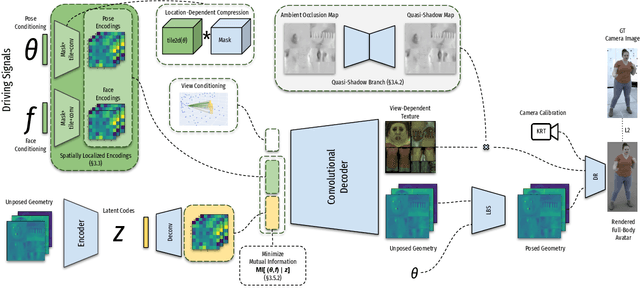
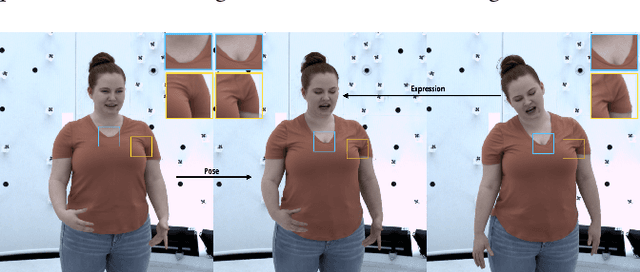
We present a learning-based method for building driving-signal aware full-body avatars. Our model is a conditional variational autoencoder that can be animated with incomplete driving signals, such as human pose and facial keypoints, and produces a high-quality representation of human geometry and view-dependent appearance. The core intuition behind our method is that better drivability and generalization can be achieved by disentangling the driving signals and remaining generative factors, which are not available during animation. To this end, we explicitly account for information deficiency in the driving signal by introducing a latent space that exclusively captures the remaining information, thus enabling the imputation of the missing factors required during full-body animation, while remaining faithful to the driving signal. We also propose a learnable localized compression for the driving signal which promotes better generalization, and helps minimize the influence of global chance-correlations often found in real datasets. For a given driving signal, the resulting variational model produces a compact space of uncertainty for missing factors that allows for an imputation strategy best suited to a particular application. We demonstrate the efficacy of our approach on the challenging problem of full-body animation for virtual telepresence with driving signals acquired from minimal sensors placed in the environment and mounted on a VR-headset.
Robust Egocentric Photo-realistic Facial Expression Transfer for Virtual Reality
Apr 10, 2021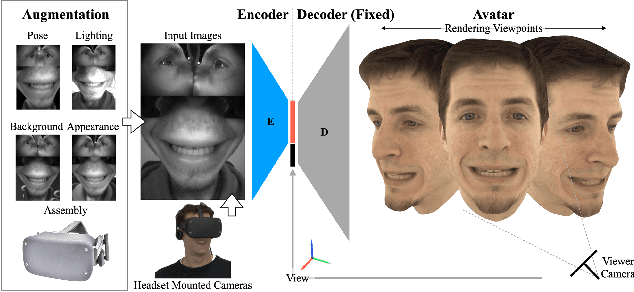
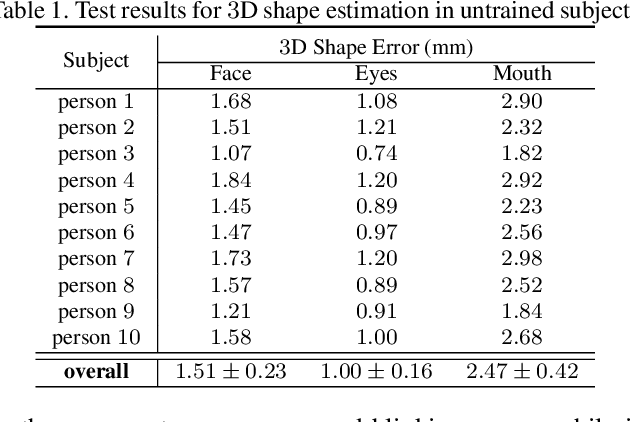
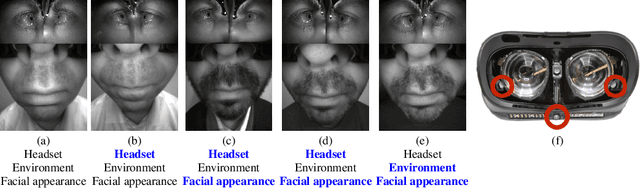
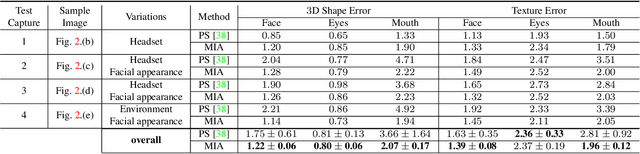
Social presence, the feeling of being there with a real person, will fuel the next generation of communication systems driven by digital humans in virtual reality (VR). The best 3D video-realistic VR avatars that minimize the uncanny effect rely on person-specific (PS) models. However, these PS models are time-consuming to build and are typically trained with limited data variability, which results in poor generalization and robustness. Major sources of variability that affects the accuracy of facial expression transfer algorithms include using different VR headsets (e.g., camera configuration, slop of the headset), facial appearance changes over time (e.g., beard, make-up), and environmental factors (e.g., lighting, backgrounds). This is a major drawback for the scalability of these models in VR. This paper makes progress in overcoming these limitations by proposing an end-to-end multi-identity architecture (MIA) trained with specialized augmentation strategies. MIA drives the shape component of the avatar from three cameras in the VR headset (two eyes, one mouth), in untrained subjects, using minimal personalized information (i.e., neutral 3D mesh shape). Similarly, if the PS texture decoder is available, MIA is able to drive the full avatar (shape+texture) robustly outperforming PS models in challenging scenarios. Our key contribution to improve robustness and generalization, is that our method implicitly decouples, in an unsupervised manner, the facial expression from nuisance factors (e.g., headset, environment, facial appearance). We demonstrate the superior performance and robustness of the proposed method versus state-of-the-art PS approaches in a variety of experiments.
SimPoE: Simulated Character Control for 3D Human Pose Estimation
Apr 01, 2021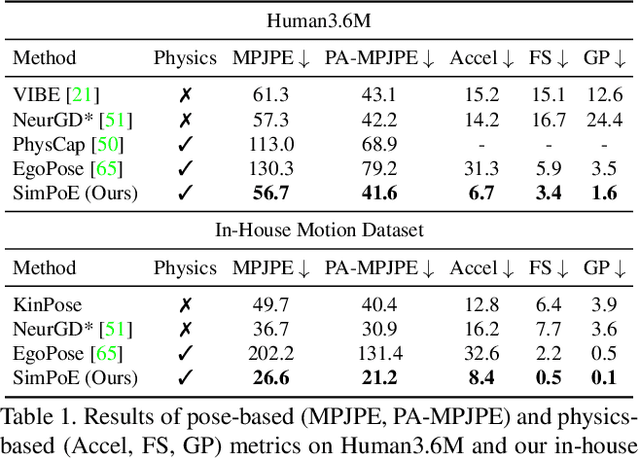
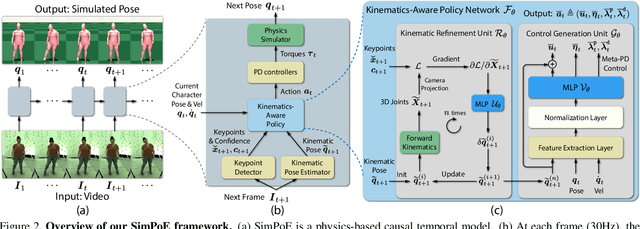
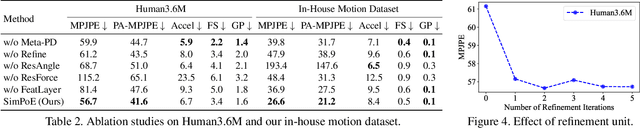
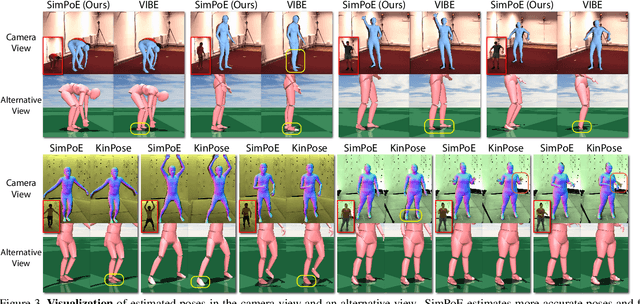
Accurate estimation of 3D human motion from monocular video requires modeling both kinematics (body motion without physical forces) and dynamics (motion with physical forces). To demonstrate this, we present SimPoE, a Simulation-based approach for 3D human Pose Estimation, which integrates image-based kinematic inference and physics-based dynamics modeling. SimPoE learns a policy that takes as input the current-frame pose estimate and the next image frame to control a physically-simulated character to output the next-frame pose estimate. The policy contains a learnable kinematic pose refinement unit that uses 2D keypoints to iteratively refine its kinematic pose estimate of the next frame. Based on this refined kinematic pose, the policy learns to compute dynamics-based control (e.g., joint torques) of the character to advance the current-frame pose estimate to the pose estimate of the next frame. This design couples the kinematic pose refinement unit with the dynamics-based control generation unit, which are learned jointly with reinforcement learning to achieve accurate and physically-plausible pose estimation. Furthermore, we propose a meta-control mechanism that dynamically adjusts the character's dynamics parameters based on the character state to attain more accurate pose estimates. Experiments on large-scale motion datasets demonstrate that our approach establishes the new state of the art in pose accuracy while ensuring physical plausibility.
Supervision by Registration and Triangulation for Landmark Detection
Jan 25, 2021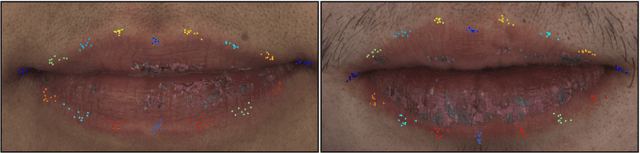
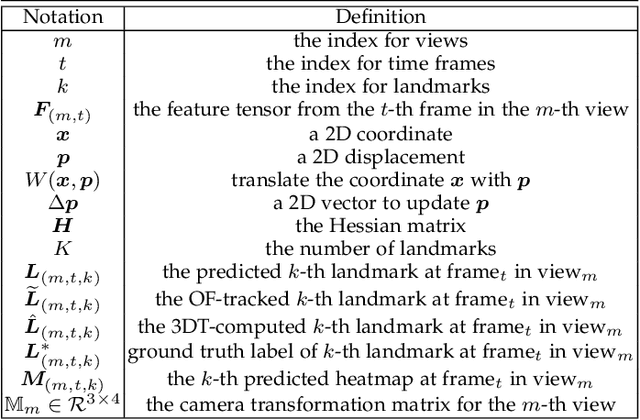
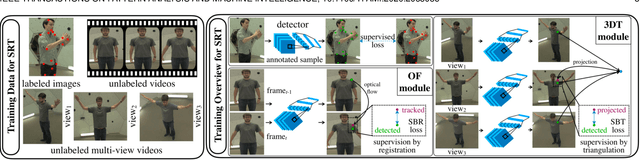
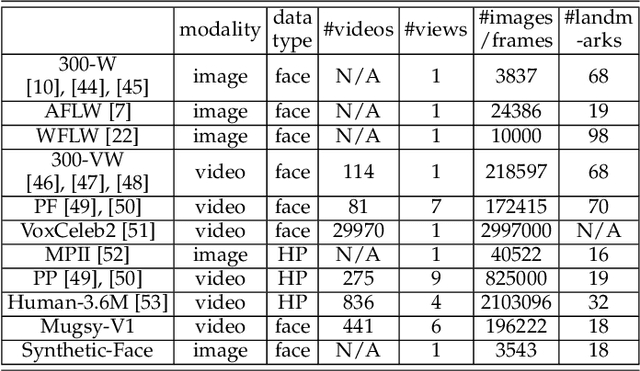
We present Supervision by Registration and Triangulation (SRT), an unsupervised approach that utilizes unlabeled multi-view video to improve the accuracy and precision of landmark detectors. Being able to utilize unlabeled data enables our detectors to learn from massive amounts of unlabeled data freely available and not be limited by the quality and quantity of manual human annotations. To utilize unlabeled data, there are two key observations: (1) the detections of the same landmark in adjacent frames should be coherent with registration, i.e., optical flow. (2) the detections of the same landmark in multiple synchronized and geometrically calibrated views should correspond to a single 3D point, i.e., multi-view consistency. Registration and multi-view consistency are sources of supervision that do not require manual labeling, thus it can be leveraged to augment existing training data during detector training. End-to-end training is made possible by differentiable registration and 3D triangulation modules. Experiments with 11 datasets and a newly proposed metric to measure precision demonstrate accuracy and precision improvements in landmark detection on both images and video. Code is available at https://github.com/D-X-Y/landmark-detection.